TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085546
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199504
出願日
2023-11-24
発明の名称
巡回業務支援管理システム及びプログラム
出願人
株式会社BIOISM
代理人
個人
主分類
G08G
1/00 20060101AFI20250529BHJP(信号)
要約
【課題】巡回ルートの巡回業務をする各作業車へ指令を出すコマンダの負担を軽減し、各作業車が効率的に業務を行える巡回業務支援管理システムの提供。
【解決手段】管理サーバは、巡回業務を行う各作業車の車載端末から逐次受信する位置情報を巡回済軌跡として保存する。一の巡回ルートを複数の作業車が巡回している場合、巡回する各作業車の車載端末(又は管理サーバ)の表示手段には、自車(観視車)の巡回済軌跡を地図上に表示させると共に、他車の巡回済軌跡を地図上に表示させる。これにより、観視車に加えて他車の業務進捗も含めて巡回ルート上での巡回業務の進捗を把握するとともに、その巡回ルート上での巡回業務が完了した区間をリアルタイムで把握することができる。また、既に巡回業務が完了した区間を重複して巡回することを防止し、業務効率の改善を図ることが出来る。
【選択図】図6
特許請求の範囲
【請求項1】
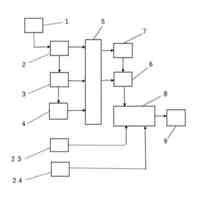
作業車が所定の巡回ルートに沿って巡回しつつ所定の業務を行う巡回業務において、各作業車の巡回業務の支援及び管理を行う巡回業務支援管理システムであって、
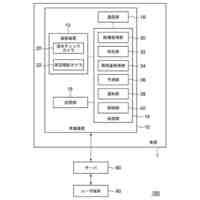
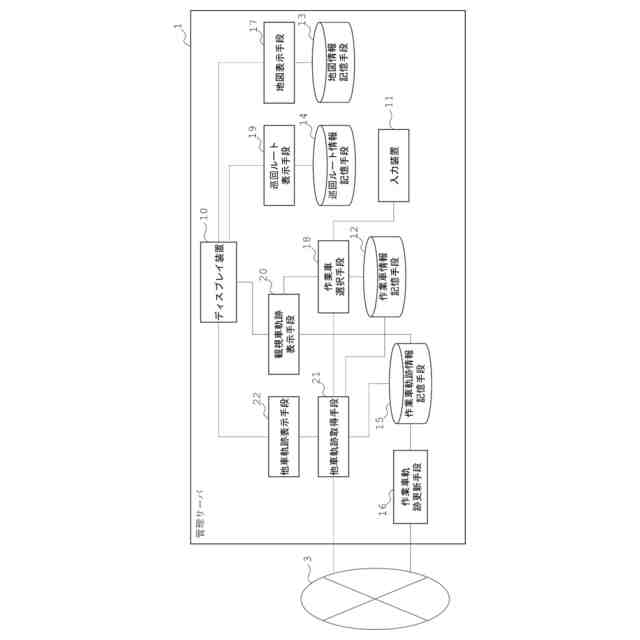
管理サーバと、
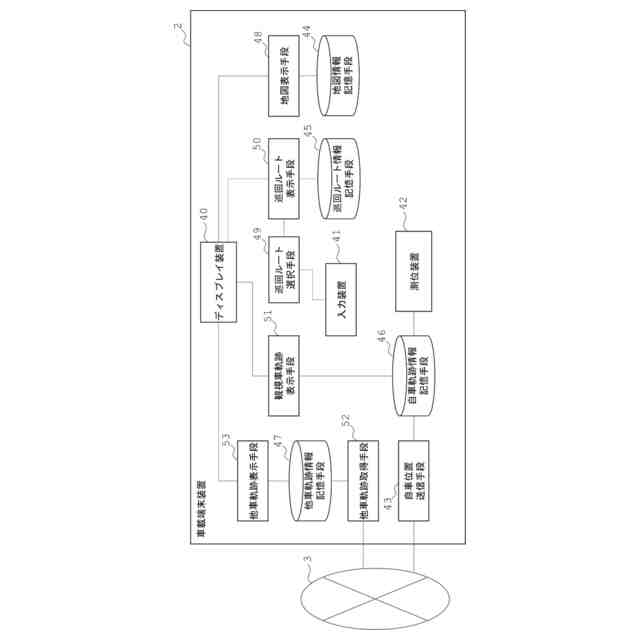
前記各作業車に搭載され、現在の位置を測位する測位装置を具備し、前記管理サーバとの間で通信回線を介して通信可能な車載端末装置と、を備え、
前記車載端末装置は、
各時刻に於いて前記測位装置により検出される現在の位置情報を前記管理サーバに送信する自車位置送信手段
を備えており、
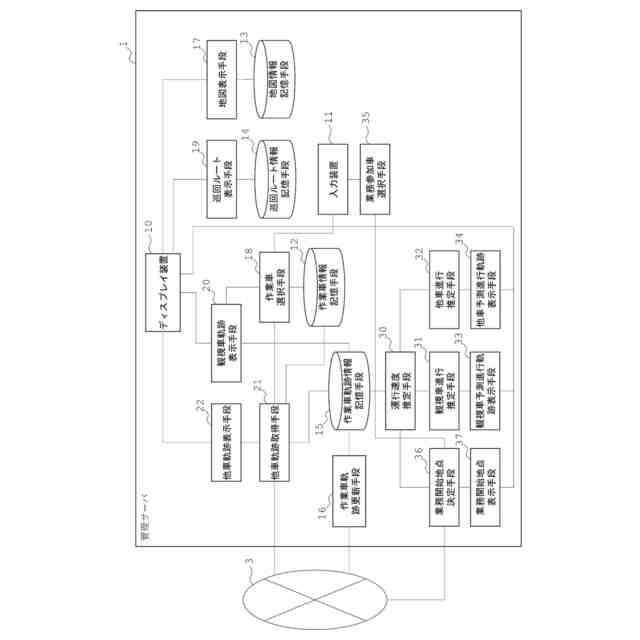
前記管理サーバは、
前記各作業車の情報であって、該作業車が現在巡回する巡回ルートの情報を含む作業車情報を記憶する作業車情報記憶手段と、
前記各作業車の巡回済軌跡を記憶する作業車軌跡記憶手段と、
前記各作業車に搭載された前記車載端末装置から送信される該作業車の位置情報を受信し、該作業車の位置及び該作業車がその位置にいる時刻を、巡回済軌跡として前記作業車軌跡記憶手段に保存する作業車軌跡更新手段と、
を備えており、
前記管理サーバ又は前記車載端末装置は、
ディスプレイ装置と、
地図情報を記憶する地図情報記憶手段と、
前記巡回ルートの情報を記憶する巡回ルート情報記憶手段と、
前記ディスプレイ装置に、地図を表示する地図表示手段と、
前記巡回ルート情報記憶手段から前記巡回ルートを読み出し、前記ディスプレイ装置に表示された地図上に表示する巡回ルート表示手段と、
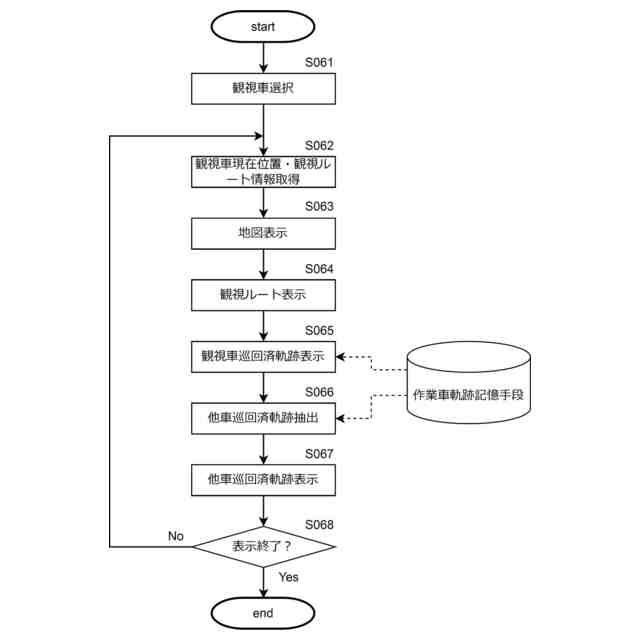
前記ディスプレイ装置に表示された地図上に、或る一の前記作業車(以下「観視車」という。)の巡回済軌跡である観視車巡回済軌跡を表示する観視車軌跡表示手段と、
前記観視車が現在巡回している前記巡回ルートを巡回する、前記観視車以外の他の前記作業車(以下「他車」という。)が、該巡回ルート上を移動した巡回済軌跡である他車巡回済軌跡を取得する他車軌跡取得手段と、
前記他車軌跡取得手段により取得される前記他車巡回済軌跡を、前記観視車巡回済軌跡と識別可能に、前記ディスプレイ装置に表示された地図上に表示する他車軌跡表示手段と、
を備えたことを特徴とする巡回業務支援管理システム。
続きを表示(約 4,800 文字)
【請求項2】
前記車載端末装置は、
前記ディスプレイ装置と、前記地図情報記憶手段と、前記巡回ルート情報記憶手段と、前記地図表示手段と、前記巡回ルート表示手段と、前記観視車軌跡表示手段と、前記他車軌跡取得手段と、前記他車軌跡表示手段と、
を備えており、
前記観視車軌跡表示手段は、各時刻に於いて前記測位装置により検出される現在位置を取得し、該車載端末装置が搭載された前記作業車である前記観視車の巡回済軌跡である観視車巡回済軌跡を、前記ディスプレイ装置に表示された地図上に表示するものであり、
前記他車軌跡取得手段は、前記管理サーバから、前記観視車が現在巡回している前記巡回ルートを巡回する前記他車が、該巡回ルート上を移動した巡回済軌跡である他車巡回済軌跡をリアルタイムに取得するものである
ことを特徴とする請求項1記載の巡回業務支援管理システム。
【請求項3】
前記管理サーバは、
前記巡回ルートの情報を記憶する巡回ルート情報記憶手段と、
前記各作業車の巡回済軌跡を記憶する作業車軌跡記憶手段と、
前記各作業車に搭載された前記車載端末装置から送信される該作業車の現在の位置情報を受信し、該作業車の現在位置及びその位置にいる時刻を巡回済軌跡として前記作業車軌跡記憶手段に保存する作業車軌跡更新手段と、
前記作業車軌跡記憶手段に記憶された前記各作業車の巡回済軌跡に基づき、前記各巡回ルート上の各点に於いて、前記作業車が運行する際の運行速度又は前点からの所要時間である推定運行速度を推定する運行速度推定手段と、
前記各作業車に搭載された前記車載端末装置から該作業車の現在位置を受信した場合、該作業車が運行している前記巡回ルート上の各点に於ける前記運行速度推定手段により推定された推定運行速度に基づき、該作業車が現在位置から所定の時間内に該巡回ルート上を移動する軌跡である観視車予測進行軌跡を算出し、該作業車に搭載された前記車載端末装置へ該観視車予測進行軌跡の情報を送信するする観視車進行推定手段と、
を備え、
前記車載端末装置は、
前記管理サーバから、前記観視車予測進行軌跡の情報を受信すると、前記ディスプレイ装置に表示された地図上に、該観視車予測進行軌跡を表示する観視車予測進行軌跡表示手段、を備えたことを特徴とする請求項2記載の巡回業務支援管理システム。
【請求項4】
前記管理サーバは、
前記巡回ルートの情報を記憶する巡回ルート情報記憶手段と、
前記各作業車の巡回済軌跡を記憶する作業車軌跡記憶手段と、
前記各作業車に搭載された前記車載端末装置から送信される該作業車の現在の位置情報を受信し、該作業車の現在位置及びその位置にいる時刻を巡回済軌跡として前記作業車軌跡記憶手段に保存する作業車軌跡更新手段と、
前記作業車軌跡記憶手段に記憶された前記各作業車の巡回済軌跡に基づき、前記各巡回ルート上の各点に於いて、前記作業車が運行する際の運行速度又は前点からの所要時間である推定運行速度を推定する運行速度推定手段と、
前記各作業車に搭載された前記車載端末装置から該作業車の現在位置を受信した場合、該作業車(以下「作業車A」という。)が運行している前記巡回ルート上の各点に於ける前記運行速度推定手段により推定された推定運行速度に基づき、
該作業車A以外の現在該巡回ルート上を運行している前記各作業車(以下「作業車B
i
」という。)について、該作業車B
i
が現在位置から所定の時間内に該巡回ルート上を移動する軌跡である他車予測進行軌跡を算出し、前記作業車Aに搭載された前記車載端末装置へ該他車予測進行軌跡の情報を送信するする他車進行推定手段と、
を備え、
前記車載端末装置は、
前記管理サーバから、前記他車予測進行軌跡の情報を受信すると、前記ディスプレイ装置に表示された地図上に、該他車予測進行軌跡を表示する他車予測進行軌跡表示手段、を備えたことを特徴とする請求項2記載の巡回業務支援管理システム。
【請求項5】
前記車載端末装置は、
使用者からの入力に従って、特定の巡回ルートの巡回業務への参加を要請する業務参加申請を前記管理サーバへ送信する業務参加申請送信手段と、
前記業務参加申請に対し前記管理サーバから応信される、巡回ルート上での巡回業務を開始する地点である業務開始地点の情報を受信すると、前記ディスプレイ装置に表示された地図上に、該業務開始地点を表示する業務開始地点表示手段と、
を備え、
前記管理サーバは、
前記巡回ルートの情報を記憶する巡回ルート情報記憶手段と、
前記各作業車の巡回済軌跡を記憶する作業車軌跡記憶手段と、
前記各作業車に搭載された前記車載端末装置から送信される該作業車の現在の位置情報を受信し、該作業車の現在位置及びその位置にいる時刻を巡回済軌跡として前記作業車軌跡記憶手段に保存する作業車軌跡更新手段と、
前記作業車軌跡記憶手段に記憶された前記各作業車の巡回済軌跡に基づき、前記各巡回ルート上の各点に於いて、前記作業車が運行する際の運行速度又は前点からの所要時間である推定運行速度を推定する運行速度推定手段と、
前記車載端末装置から前記業務参加申請を受信した場合、該業務参加申請に係る巡回ルート(以下「申請ルート」という。)のルート上で、該業務参加申請を送信した前記車載端末装置に係る前記作業車(以下「参加申請車」という。)の、該申請ルート上での該参加申請車の業務開始地点を決定し、該参加申請車の前記車載端末装置へ該業務開始地点の情報を送信する業務開始地点決定手段と、
を備え、
前記業務開始地点決定手段は、
前記申請ルートを現在巡回している前記作業車(以下「既参加車」という。)が既に存在する場合、
該申請ルート上の各点に於ける前記運行速度推定手段により推定された推定運行速度に基づき、前記既参加車が現時点から後に該申請ルート上を巡回する巡回時間と、前記参加申請車が現在位置から前記業務開始地点へ到達し、その後該申請ルート上を巡回する巡回時間との総和(但し、前記既参加車が巡回する申請ルート上の区間と前記参加申請車が巡回する申請ルート上の区間とは重ならないものとする。)が最小となるように、前記業務開始地点を決定するものであること
を特徴とする請求項2記載の巡回業務支援管理システム。
【請求項6】
前記管理サーバは、
前記ディスプレイ装置と、前記地図情報記憶手段と、前記巡回ルート情報記憶手段と、前記地図表示手段と、前記巡回ルート表示手段と、前記観視車軌跡表示手段と、前記他車軌跡取得手段と、前記他車軌跡表示手段と、
前記作業車情報記憶手段に記憶された前記各作業車の中から、一の前記作業車を前記観視車として選択する作業車選択手段と、
を備えており、
前記巡回ルート表示手段は、前記作業車選択手段により選択された前記観視車が巡回している巡回ルートを、前記ディスプレイ装置に表示された地図上に表示するものであり、
前記観視車軌跡表示手段は、前記観視車の巡回済軌跡である観視車巡回済軌跡を前記作業車軌跡記憶手段からリアルタイムに取得し、前記ディスプレイ装置に表示された地図上に表示するものであり、
前記他車軌跡取得手段は、前記観視車が現在巡回している前記巡回ルートを巡回する前記他車が、該巡回ルート上を移動した巡回済軌跡である他車巡回済軌跡を、前記作業車軌跡記憶手段からリアルタイムに取得するものである
ことを特徴とする請求項1記載の巡回業務支援管理システム。
【請求項7】
前記管理サーバは、
前記作業車軌跡記憶手段に記憶された前記各作業車の巡回済軌跡に基づき、前記各巡回ルート上の各点に於いて、前記作業車が運行する際の運行速度又は前点からの所要時間である推定運行速度を推定する運行速度推定手段と、
前記観視車が運行している前記巡回ルート上の各点に於ける前記運行速度推定手段により推定された推定運行速度に基づき、該観視車が現在位置から所定の時間内に該巡回ルート上を移動する軌跡である観視車予測進行軌跡を算出する観視車進行推定手段と、
前記ディスプレイ装置に表示された地図上に、該観視車予測進行軌跡を表示する観視車予測進行軌跡表示手段と、
を備えたことを特徴とする請求項6記載の巡回業務支援管理システム。
【請求項8】
前記管理サーバは、
前記作業車軌跡記憶手段に記憶された前記各作業車の巡回済軌跡に基づき、前記各巡回ルート上の各点に於いて、前記作業車が運行する際の運行速度又は前点からの所要時間である推定運行速度を推定する運行速度推定手段と、
前記観視車が運行している前記巡回ルート上の各点に於ける前記運行速度推定手段により推定された推定運行速度に基づき、
該巡回ルート上を現在運行している該観視車以外の前記各他車について、該他車が現在の位置から所定の時間内に該巡回ルート上を移動する軌跡である他車予測進行軌跡を算出する他車進行推定手段と、
前記ディスプレイ装置に表示された地図上に、該他車予測進行軌跡を表示する他車予測進行軌跡表示手段と、
を備えたことを特徴とする請求項6記載の巡回業務支援管理システム。
【請求項9】
前記管理サーバは、
前記作業車軌跡記憶手段に記憶された前記各作業車の巡回済軌跡に基づき、前記各巡回ルート上の各点に於いて、前記作業車が運行する際の運行速度又は前点からの所要時間である推定運行速度を推定する運行速度推定手段と、
使用者からの入力に従って、一の巡回ルート(以下「観視ルート」という。)への巡回業務へ参加を要請する作業車(以下「参加要請車」という。)を選択する業務参加車選択手段と、
前記業務参加車選択手段により前記参加要請車が選択されると、前記観視ルートのルート上で、前記参加要請車の業務開始地点を決定する業務開始地点決定手段と、
前記ディスプレイ装置に表示された地図上に、該業務開始地点を表示する業務開始地点表示手段と、
を備え、
前記業務開始地点決定手段は、
前記観視ルートを現在巡回している前記作業車(以下「既参加車」という。)が既に存在する場合、
該観視ルート上の各点に於ける前記運行速度推定手段により推定された推定運行速度に基づき、前記既参加車が現時点から後に該観視ルート上を巡回する巡回時間と、前記参加要請車が現在の位置から前記業務開始地点へ到達し、その後該観視ルート上を巡回する巡回時間との総和(但し、前記既参加車が巡回する観視ルート上の区間と前記参加要請車が巡回する観視ルート上の区間とは重ならないものとする。)が最小となるように、前記業務開始地点を決定するものであること
を特徴とする請求項6記載の巡回業務支援管理システム。
【請求項10】
ディスプレイ装置、及び現在の位置を測位する測位装置を具備するコンピュータに読み込ませて実行することにより、該コンピュータを、請求項2乃至5の何れか一記載の巡回業務支援管理システムが備える車載端末装置として機能させることを特徴とするプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車が所定の巡回ルートに沿って巡回しつつ所定の業務を行う巡回業務において、各作業車の巡回業務の支援及び管理を行う巡回業務支援管理システムに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
作業車が所定の巡回ルートに沿って巡回しつつ所定の作業を行う業務(職業や事業などに関して、継続して行われる仕事や作業)を「巡回業務」という。巡回業務としては、例えば、塵芥収集業務、書簡又は荷物若しくは商品の配達業務、道路清掃業務等が挙げられる。斯かる巡回業務の業務効率の向上を図るため、例えば、特許文献1~3記載の巡回業務支援管理システムが提案されている。
【0003】
特許文献1には、塵芥収集業務に係る巡回業務支援管理システムが記載されている。このシステムは、管理サーバと作業員端末装置を備え、作業員端末装置は、ゴミ収集ルート上のゴミステーション(ST)情報のSTリストを管理サーバから取得し、タッチパネルディスプレイ(TD)上に地図を表示し、STリストの各ST情報に基づき、地図上に各ST位置をマーク「●」で表示する。また、STリストに含まれるST情報を、リストとしてTD画面上の地図の側部に表示する。そして、作業員がSTリストに含まれるST情報をタッチすることで、一のSTを選択し、選択されたSTに係るST写真やガイド情報がTDに表示され又はスピーカから出力される。これにより、位置が分かりにくいSTでもその位置をより容易に把握できるようになり、業務を行う作業員が、該ルートを初めて担当するような場合でも、各STにおける収集業務を確実に遂行できる。結果、作業員の属人的な熟練度,経験値に依ることなく、高水準でのゴミ収集役務の均質化が図られる。
【0004】
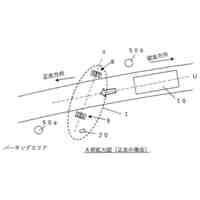
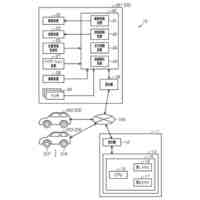
特許文献2には、塵芥収集業務に係る巡回業務支援管理システムが記載されている。このシステムは、サーバ(20)と車載装置(30)を備える(仝文献図1,図2参照)。車載装置(30)は、車両の位置と方位と速度と後退情報を含む車両状態情報を車両が搭載する計測機器(GPS受信機、ジャイロセンサ、車速センサ、バックセンサ)を介し所定時間間隔で取得する情報取得手段(11)と、車両位置取得手段(12)と、表示手段(13)を備えている。サーバ(20)は、情報取得手段で取得された車両状態情報に基づき、予め備えた地図情報上に当該地図情報に存在する道路および地図情報に存在する道路以外の経路を含む車両が移動した軌跡を生成するとともに、当該軌跡上における車両のUターン位置、後退区間、停止位置、停止方向の全てまたは一部を示した付属情報を生成し、当該軌跡に付属情報を付加した車両軌跡情報を生成する軌跡情報生成手段(21)を備えている。車載装置(30)は、現在地付近の地図情報をディスプレイ装置に表示し(仝文献図7参照)、地図上に車両の軌跡Rを重ねて表示する。また、軌跡Rを表示する際、走行詳細情報および収集位置特定情報に基づき種々の表示をする。例えば、車両の前進区間を鎖線で表示し、Uターン位置を実線で表示し、後進区間を一点鎖線で表示する。また、各区間・位置に対して特定の記号や「バック区間です」「Uターンして下さい」などの文字表示を行う。これにより、新人運転手であってもベテラン運転手と同じように効率的な走行が可能となる。
【0005】
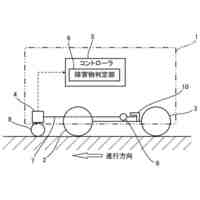
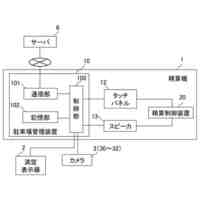
特許文献3には、塵芥収集業務に係る巡回業務支援管理システム(廃棄物回収支援システム)が記載されている。このシステムは、回収車両び搭載のナビゲーション装置(ナビゲーションシステム)(100)、廃棄物の回収の管理を行う管理者端末(200)、及びこれらと通信可能なサーバ(10)を備えている(仝文献図1参照)。サーバ(10)は、回収ステーション(回収予定地)の各々において、回収完了地点であるか、又は回収未完了地点であるかを判断する廃棄物回収判断部(21a)と、回収ステーションをナビゲーション装置(100)のディスプレイに表示する表示制御部(21b)を備える。表示制御部(21b)は、通信回線を介してナビゲーション装置100における地図の表示を制御する。ナビゲーション装置(100)のディスプレイには、地図が描画され、該地図上に回収ステーションのアイコンが描画される(仝文献図2,図3参照)。廃棄物回収判断部(21a)は、ナビゲーション装置(100)から回収車両の現在地を取得し、当該回収車両の現在地と回収ステーションとの距離が予め定めた既定距離内になったら当該回収ステーションにおける廃棄物の回収を完了したとみなす。表示制御部(21b)は、回収ステーションのうち、回収未完了地点に基づく縮尺(回収未完了の地点の個数が、少なくとも設定した地点数以上になる縮尺)でディスプレイに地図を表示する。これにより、回収者に対し回収未完了地点の回収ステーションを回収する都度毎に確認するなどの作業が生じることを抑制できる。また、回収未完了地点の回収ステーションにおいて、廃棄物の回収が完了したら、当該回収ステーションのアイコンの色を変更し、又は該回収ステーションの表示を消去する。これにより、回収者は、ディスプレイに表示される回収ステーションが回収完了地点なのか、回収未完了地点なのかの判断を容易に行うことができる。
【先行技術文献】
【特許文献】
【0006】
特開2020-129374号公報
特開2008-071072号公報
特開2023-109373号公報
特開2021-156581号公報
【非特許文献】
【0007】
鈴木薫,「ごみの収集方式」,国立環境研究所ニュース,Vol.39,No.4,pp.11-14,2020年.
【発明の概要】
【発明が解決しようとする課題】
【0008】
巡回業務の一つである塵芥収集業務は、我が国では、大きく分類すると、「ステーション収集」と「戸別収集」とに分けることが出来る(非特許文献1)。「ステーション収集」とは、複数の世帯でゴミ集積所(ゴミステーション:一般廃棄物(家庭系ごみ)を排出及び収集するための一時的に集積する場所。)を共同で利用し、収集業者により塵芥収集する方式をいう。「戸別収集」とは、それぞれの家の前にゴミを置いて、収集業者により塵芥収集する方式をいう。
【0009】
上記の特許文献1~3記載の巡回業務支援管理システムは、何れも、ゴミ集積所を巡回して塵芥収集業務を行うことを支援又は管理するシステムであり、ステーション収集を前提とするものといえる。一方、戸別収集の場合、塵芥車(ごみを収集して処分施設まで運搬する目的に特化した作業車。)は、あらかじめ定められた巡回ルートを巡回し、コース上の各所の家又は事業所の前(道路に面した自宅又は事業所の敷地内)に置かれたゴミを収集してゆく。この際にも、巡回ルートの案内にナビゲーションシステムが使用される(特許文献4参照)。
【0010】
ところで、実際の現場では、全体の業務時間を短縮するため、一つの戸別収集巡回ルートを複数の塵芥車により巡回収集する場合がある。斯かる場合、同じ戸別収集巡回ルートを担当する各塵芥車が、どの地点からどの区間を巡回するかは、各塵芥車の運行指示を行う指令センターによって指示が出されていた。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
2か月前
個人
自動車ケアフル灯
2か月前
能美防災株式会社
発信機
2か月前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
1か月前
個人
逆走・正走車両検出システム
1か月前
アズビル株式会社
建物管理システム
20日前
日本信号株式会社
情報提供システム
1か月前
ホーチキ株式会社
異常報知設備
1か月前
ホーチキ株式会社
異常報知設備
1か月前
株式会社JVCケンウッド
情報処理装置
12日前
タック株式会社
安全監視システム
2か月前
株式会社JVCケンウッド
通知システム
2か月前
個人
磁気・光学誘導路線による車両の運行制御
1か月前
ホーチキ株式会社
非常通報システム
1か月前
株式会社フィットネスワン
見守りシステム
1か月前
トヨタ自動車株式会社
配車システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
株式会社アジラ
注目行動呼びかけシステム
2か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
トヨタ自動車株式会社
障害物検知装置
6日前
ユニティガードシステム株式会社
警備監視システム
17日前
Adora株式会社
アプリ使用制御システム
1か月前
能美防災株式会社
火災感知器窓部清掃システム
4日前
東亜電子工業株式会社
警報コントローラ
2か月前
シャープ株式会社
駐車場管理装置
28日前
トヨタ自動車株式会社
車両
2か月前
能美防災株式会社
非常報知システム
2か月前
株式会社アドヴィックス
走行支援システム
1か月前
愛知時計電機株式会社
生活データ集計装置
2か月前
トヨタ自動車株式会社
運転支援装置
1か月前
株式会社エイビット
工事観測システム
18日前
矢崎総業株式会社
路面監視装置
2か月前
トヨタ自動車株式会社
車両
27日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ