TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085990
公報種別
公開特許公報(A)
公開日
2025-06-06
出願番号
2023199733
出願日
2023-11-27
発明の名称
搬送対象物を搬送するための自動搬送ロボット、台車、搬送システム、および搬送対象物の搬送方法
出願人
株式会社フジタ
代理人
弁理士法人高橋・林アンドパートナーズ
主分類
B61B
13/00 20060101AFI20250530BHJP(鉄道)
要約
【課題】搬送対象物を安全に、かつ、効率良く搬送可能な自動搬送ロボット、台車、およびこれらの自動搬送ロボットと台車を含む自動搬送システムを提供すること。
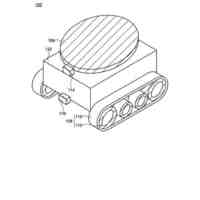
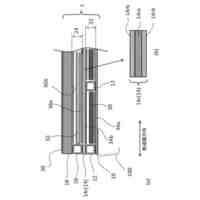
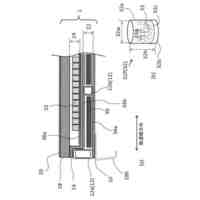
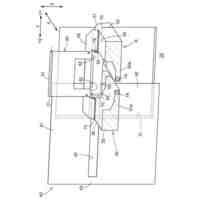
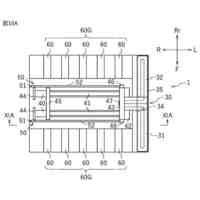
【解決手段】自動搬送ロボットは、搬送対象物を搭載するための台車を持ち上げるように構成される支持テーブルを備える。支持テーブルの平面形状の輪郭は、直線、および上記直線の両端に連結される曲線を含む。支持テーブルは、上記直線が自動搬送ロボットの進行方向と交差し、進行方向において上記直線が最前に位置するように配置される。
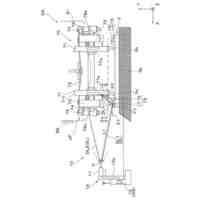
【選択図】図2
特許請求の範囲
【請求項1】
搬送対象物を搭載するための台車を持ち上げるように構成される支持テーブルを備える自動搬送ロボットであり、
前記支持テーブルの平面形状の輪郭は、直線、および前記直線の両端に連結される曲線を含み、
前記支持テーブルは、前記直線が前記自動搬送ロボットの進行方向と交差し、前記進行方向において前記直線が最前に位置するように配置される、自動搬送ロボット。
続きを表示(約 920 文字)
【請求項2】
前記輪郭は、前記直線と前記曲線からなる、請求項1に記載の自動搬送ロボット。
【請求項3】
前記曲線は、円弧である、請求項1に記載の自動搬送ロボット。
【請求項4】
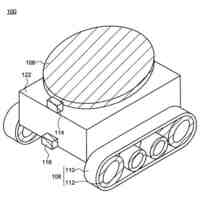
一対の接触センサをさらに備え、
前記支持テーブルは、法線が前記進行方向と平行な平坦面を有し、
前記一対の接触センサは、前記平坦面に設けられる、請求項1に記載の自動搬送ロボット。
【請求項5】
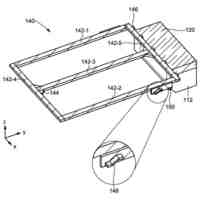
平面形状が矩形である天板、
前記天板下の複数のキャスタ、および
前記天板下の少なくとも一つの停止板を備え、
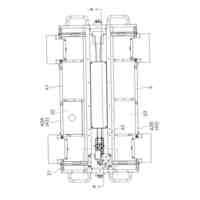
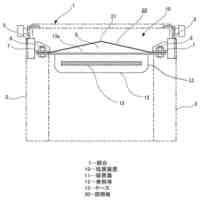
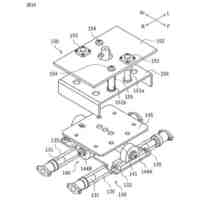
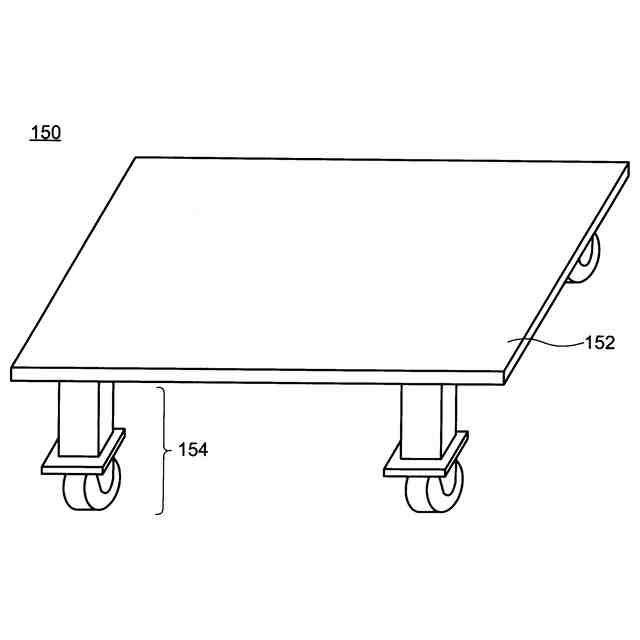
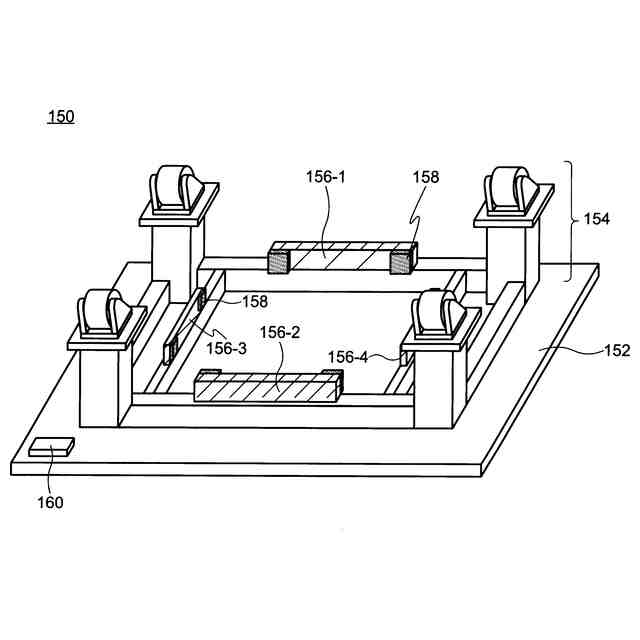
前記少なくとも一つの停止板は、法線が前記天板の主面に対して平行であり、長手方向が前記矩形の一つの辺と平行になるように配置される、台車。
【請求項6】
前記少なくとも一つの停止板は、
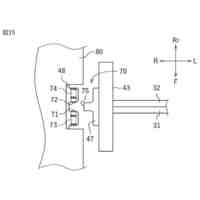
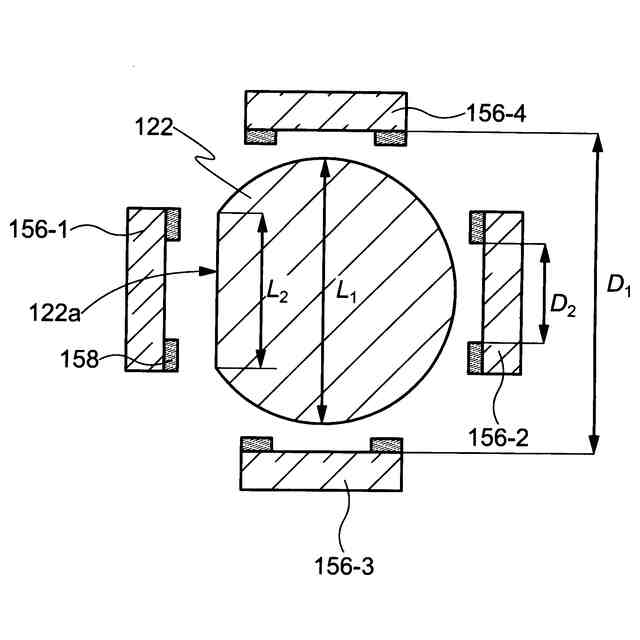
前記台車を持ち上げるための支持テーブルを備え、前記台車を搬送するように構成される自動搬送ロボットが前記天板の下に位置する際、前記支持テーブルが最も下に位置するときに前記支持テーブルと接触せず、前記支持テーブルが上昇すると前記支持テーブルと接触するように構成される、請求項5に記載の台車。
【請求項7】
前記停止板の主面に設けられる一対の接触センサをさらに備える、請求項5に記載の台車。
【請求項8】
前記接触センサは、前記少なくとも一つの停止板を基準として、前記天板の中心側に配置される、請求項7に記載の台車。
【請求項9】
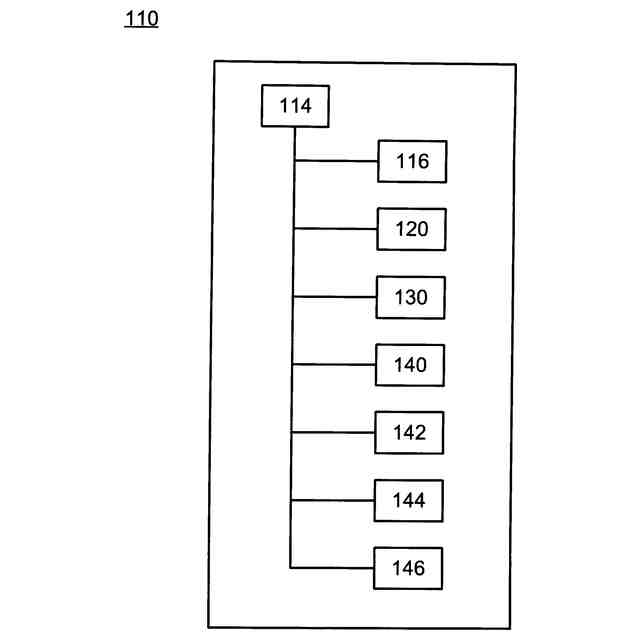
前記一対の接触センサと接続され、前記一対の接触センサから取得する信号を外部通信端末に対して送信するように構成される制御装置をさらに備える、請求項7に記載の台車。
【請求項10】
前記少なくとも一つの停止板は、第1の停止板、第2の停止板、第3の停止板、および第4の停止板を含み、
前記第1の停止板と前記第2の停止板は互いに平行に配置され、前記第3の停止板と前記第4の停止板に対して垂直に配置される、請求項5に記載の台車。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態の一つは、搬送対象物を搬送するための自動搬送ロボットと台車、自動搬送ロボットと台車を含む搬送システム、および搬送システムを利用する搬送対象物の搬送方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
近年、自動搬送車(AGV:Automatic Guided Vehicle)の技術開発が進み、例えば工事現場や建設現場などにおいて工事資材や建設資材を搬送するための資材台車(以下、単に台車と記す)を自動搬送する自動搬送ロボットが開発されるに至っている。例えば特許文献1から3に開示された自動搬送ロボットは、台車を牽引しながら、または持ち上げながら自動走行する。自動搬送ロボットを自動走行させながら資材を搬送することで、資材搬送のための人的資源が節約できる。
【先行技術文献】
【特許文献】
【0003】
特開2023-138055号公報
特開2023-136060号公報
特開2022-149790号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
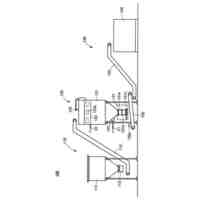
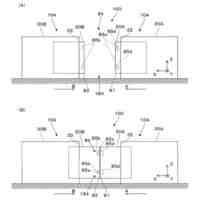
自動搬送ロボットが台車の下に進入し、目的の位置に停止するにあたり、自動搬送ロボットの進入する角度によっては適切な位置に停止できず、位置の再調整が必要となる。このとき、搬送ロボットを下部に収める台車の内部構造によっては搬送ロボットの支持テーブルがひっかかり、スタックしてしまうおそれがあった。特に台車下の空間を狭く構成するほどこのリスクは高まる。
【0005】
本発明の実施形態の一つは、新規な構造を有する自動搬送ロボット、台車、およびこれらの自動搬送ロボットと台車を含む自動搬送システムを提供することを課題の一つとする。あるいは、本発明の実施形態の一つは、搬送対象物を安全に、かつ、効率良く搬送可能な自動搬送ロボット、台車、およびこれらの自動搬送ロボットと台車を含む自動搬送システムを提供することを課題の一つとする。あるいは、本発明の実施形態の一つは、上記搬送システムを利用して搬送対象物を搬送する方法を提供することを課題の一つとする。
【課題を解決するための手段】
【0006】
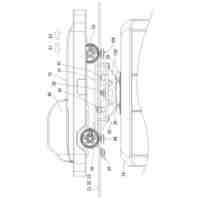
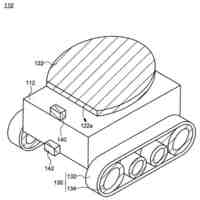
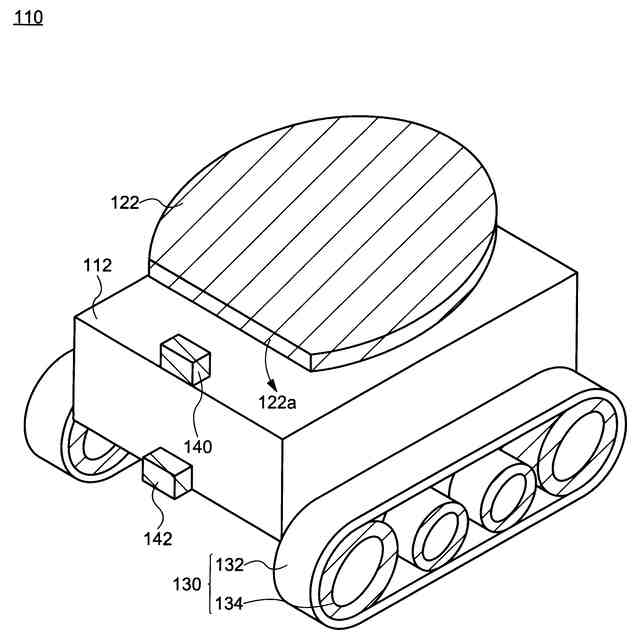
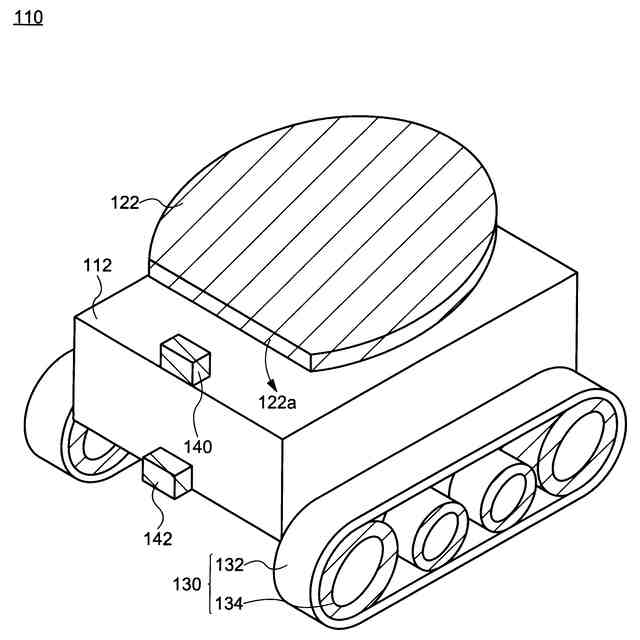
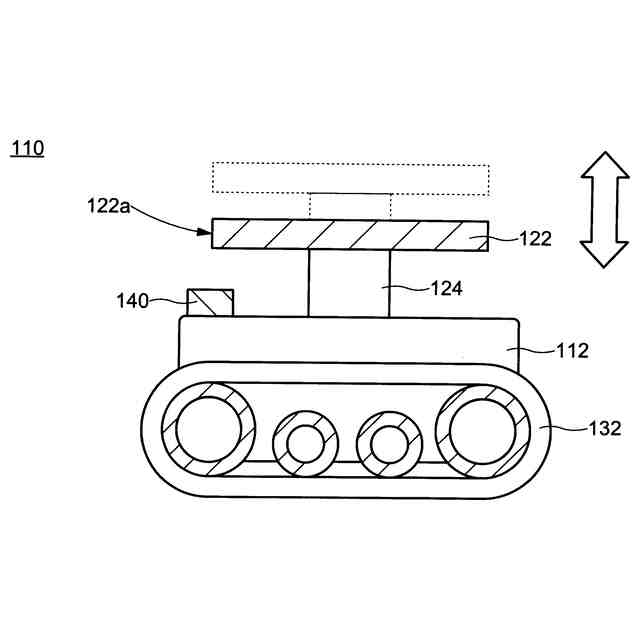
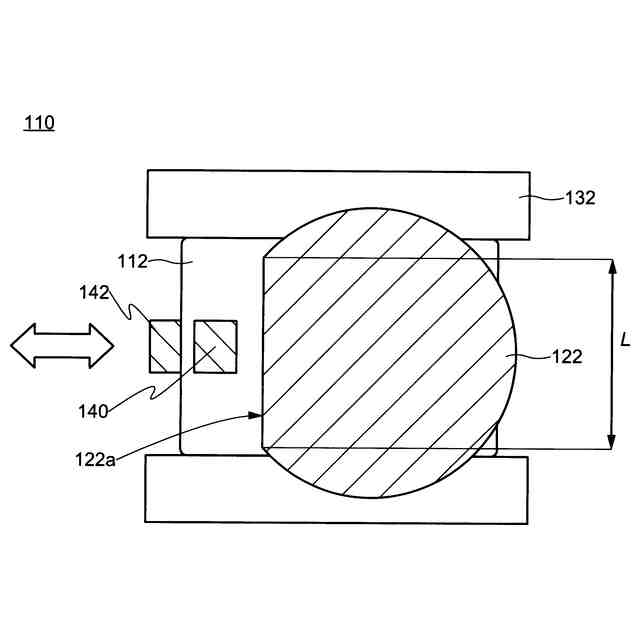
本発明の実施形態の一つは、自動搬送ロボットである。この自動搬送ロボットは、搬送対象物を搭載するための台車を持ち上げるように構成される支持テーブルを備える。支持テーブルの平面形状の輪郭は、直線、および上記直線の両端に連結される曲線を含む。支持テーブルは、上記直線が自動搬送ロボットの進行方向と交差し、進行方向において上記直線が最前に位置するように配置される。
【0007】
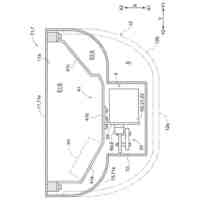
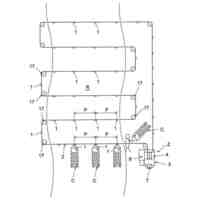
本発明の実施形態の一つは、台車である。この台車は、平面形状が矩形である天板、天板下の複数のキャスタ、および天板下の少なくとも一つの停止板を備える。少なくとも一つの停止板は、法線が天板の主面に対して平行であり、長手方向が上記矩形の一つの辺と平行になるように配置される。
【0008】
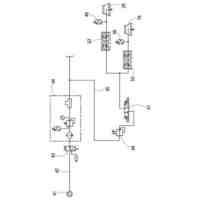
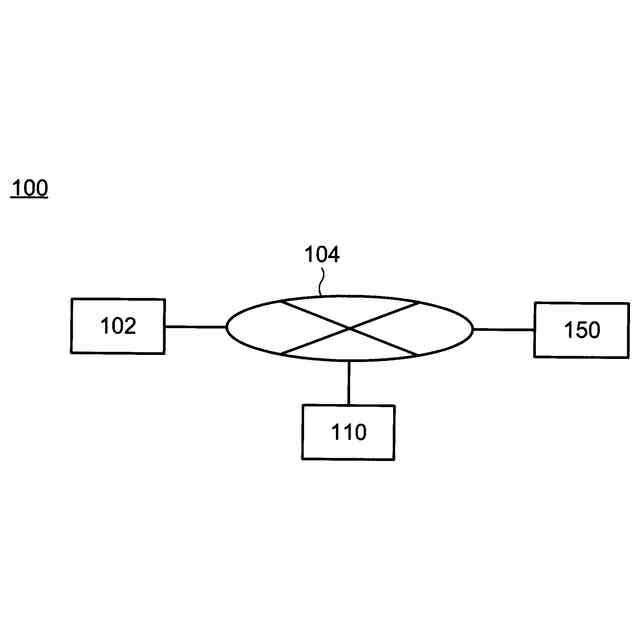
本発明の実施形態の一つは、搬送対象物の搬送システムである。この搬送システムは、通信端末、通信端末と通信接続される自動搬送ロボット、および自動搬送ロボットによって搬送されるように構成される台車を含む。自動搬送ロボットは、搬送対象物を搭載するための台車を持ち上げるように構成される支持テーブルを備える。支持テーブルの平面形状の輪郭は、直線、および上記直線の両端に連結される曲線を含む。支持テーブルは、上記直線が自動搬送ロボットの進行方向と交差するように配置される。台車は、平面形状が矩形である天板、天板下の複数のキャスタ、および天板下の少なくとも一つの停止板を備える。少なくとも一つの停止板は、法線が天板の主面に対して平行であり、長手方向が上記矩形の一つの辺と平行になるように配置される。自動搬送ロボットと台車の少なくとも一方は、一対の接触センサを有する。自動搬送ロボットが一対の接触センサを有する場合、支持テーブルは、法線が進行方向と平行な平坦面を有し、一対の接触センサは、上記平坦面に設けられる。台車が一対の接触センサを有する場合、一対のセンサは、停止板の主面に設けられる。
【0009】
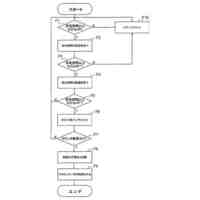
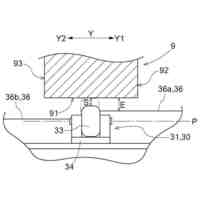
本発明の実施形態の一つは、搬送対象物を搭載するように構成される台車を自動搬送ロボットで搬送する方法である。自動搬送ロボットは、搬送対象物を搭載するための台車を持ち上げるように構成される支持テーブルを有する。支持テーブルの平面形状の輪郭は、直線、および上記直線の両端に連結される曲線を含む。支持テーブルは、上記直線が自動搬送ロボットの進行方向と交差するように配置される。台車は、平面形状が矩形である天板、天板下の複数のキャスタ、および天板下の少なくとも一つの停止板を備える。少なくとも一つの停止板は、法線が天板の主面に対して平行であり、長手方向が上記矩形の一つの辺と平行になるように配置される。自動搬送ロボットと台車の少なくとも一方は、一対の接触センサをさらに有する。自動搬送ロボットが一対の接触センサを有する場合、支持テーブルは、法線が進行方向と平行な平坦面を有し、一対の接触センサは、上記平坦面に設けられる。台車が一対の接触センサを有する場合、一対のセンサは、停止板の主面に設けられる。上記方法は、支持テーブルが少なくとも一つの停止板と接触しない状態で自動搬送ロボットを台車の下に配置すること、支持テーブルが停止板と接触し、かつ、天板と接触しない高さまで支持テーブルを上昇させること、および、一対の接触センサの両者が、自動搬送ロボットが一対の接触センサを有する場合には少なくとも一つの停止板と接触するまで、台車が一対の接触センサを有する場合には支持テーブルと接触するまで、自動搬送ロボットを前進させることを含む。
【発明の効果】
【0010】
自動搬送ロボットが不適切な角度で台車の下に進入した際、自動搬送ロボットと台車の相対位置の再調整を行う場合、自動搬送ロボットが備える支持テーブルの非進行方向部分が曲線で構成されることにより、台車下の内部構造にひっかかりスタックを起こすことが回避できる。一方、支持テーブルの直線は進行方向において最前に位置するので、自動搬送ロボットを台車に対して適切な位置に配置することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社フジタ
水処理装置
16日前
株式会社フジタ
自動搬送ロボット
13日前
株式会社フジタ
自動搬送ロボット
23日前
株式会社フジタ
放射空調システム、ならびに放射空調システムのスペーサ、取り付け器具、および断熱パネル
9日前
株式会社フジタ
搬送対象物を搬送するための自動搬送ロボット、台車、搬送システム、および搬送対象物の搬送方法
2日前
鹿島建設株式会社
炭酸カルシウムの回収システム、炭酸カルシウムの回収方法
5日前
個人
コンテナ輸送システム
9か月前
日本信号株式会社
検査装置
5か月前
個人
車両及び走行システム
1か月前
東光産業株式会社
電動台車
11か月前
コイト電工株式会社
座席装置
11か月前
コイト電工株式会社
暖房装置
9か月前
コイト電工株式会社
暖房装置
9か月前
株式会社新陽社
発車標
9か月前
日本車輌製造株式会社
鉄道車両
9か月前
日本信号株式会社
ホーム柵装置
2か月前
日本車輌製造株式会社
鉄道車両
9か月前
川崎車両株式会社
鉄道車両用パネル
3か月前
保線機器整備株式会社
保線用カート
4か月前
近畿車輌株式会社
鉄道車両の床構造
6か月前
日本車輌製造株式会社
台車組立装置
6日前
近畿車輌株式会社
鉄道車両の床構造
6か月前
近畿車輌株式会社
鉄道車両の床構造
6か月前
カヤバ株式会社
鉄道車両用制振装置
9か月前
カヤバ株式会社
鉄道車両用制振装置
5か月前
日本信号株式会社
物体検知装置
2か月前
日本信号株式会社
踏切道監視システム
6か月前
株式会社ダイフク
搬送車
18日前
日本信号株式会社
ホーム安全システム
2か月前
株式会社ダイフク
搬送設備
8か月前
ヤマハ発動機株式会社
無人搬送車
2か月前
前川鉄工株式会社
ロープ駆動装置
7か月前
シャープ株式会社
表示装置
7か月前
株式会社ダイフク
搬送設備
1か月前
ヤマハ発動機株式会社
無人搬送車
2か月前
ヤマハ発動機株式会社
無人搬送車
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ