TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025086696
公報種別
公開特許公報(A)
公開日
2025-06-09
出願番号
2023200888
出願日
2023-11-28
発明の名称
画像処理装置、画像処理方法および障害物検知システム
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
G06T
7/70 20170101AFI20250602BHJP(計算;計数)
要約
【課題】撮像された画像内の物体の位置によらず、2次元座標から3次元座標を精度よく推定することができる画像処理装置等を提供する。
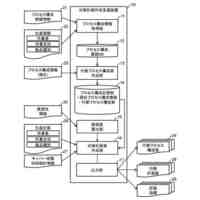
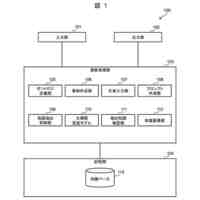
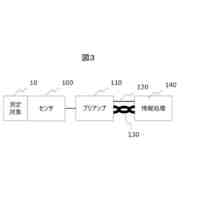
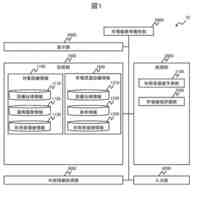
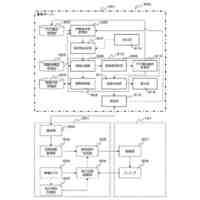
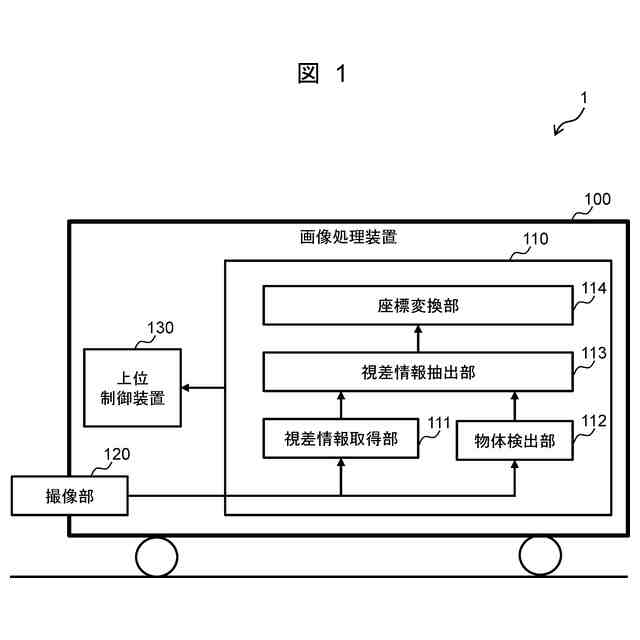
【解決手段】列車100の前方を撮像する複数のカメラにて撮像した画像中の物体の3次元座標を算出する画像処理装置110であって、画像に基づき、視差情報を取得する視差情報取得部111と、画像を用いて物体の検出を行うとともに、画像中で物体の検出がされた箇所として第1の領域を設定する物体検出部112と、第1の領域内で視差情報が小さい箇所における視差情報の代表値を抽出する視差情報抽出部113と、視差情報抽出部により抽出された代表値に基づき、第1の領域の2次元座標を3次元座標に変換する座標変換部114と、を備えることを特徴とする画像処理装置110。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の前方を撮像する複数のカメラにて撮像した画像中の物体の3次元座標を算出する画像処理装置であって、
前記画像に基づき、視差情報を取得する視差情報取得部と、
前記画像を用いて物体の検出を行うとともに、前記画像中で物体の検出がされた箇所として第1の領域を設定する物体検出部と、
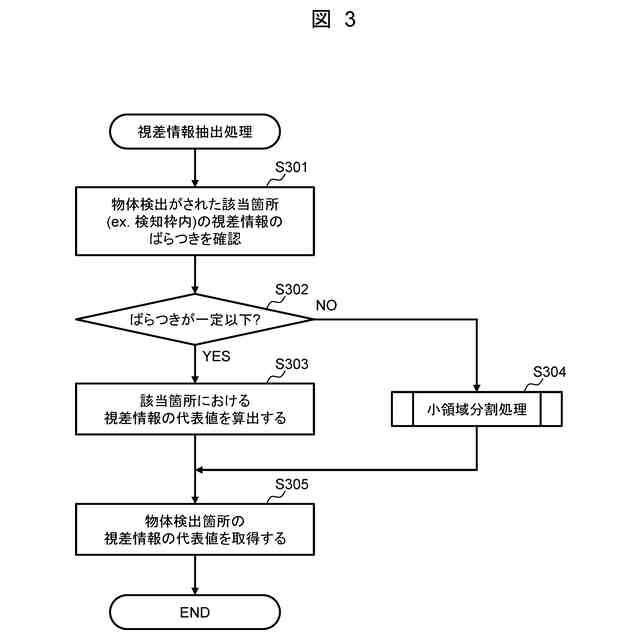
前記第1の領域内で視差情報が小さい箇所における視差情報の代表値を抽出する視差情報抽出部と、
前記視差情報抽出部により抽出された前記代表値に基づき、前記第1の領域の2次元座標を3次元座標に変換する座標変換部と、
を備えることを特徴とする画像処理装置。
続きを表示(約 980 文字)
【請求項2】
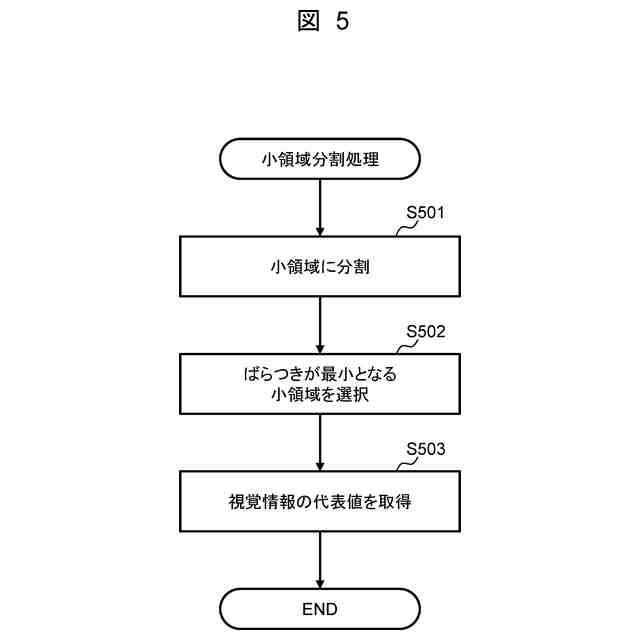
前記視差情報抽出部は、前記第1の領域内の視差情報のばらつきに応じて前記第1の領域を分割することで複数の第2の領域を設定し、複数の前記第2の領域の中で視差情報が小さくなる箇所における視差情報の代表値を抽出する請求項1に記載の画像処理装置。
【請求項3】
前記第2の領域は、前記第1の領域の大きさに基づき、前記画像の上下方向および左右方向の分割数を求め、前記分割数により前記第1の領域を分割することにより設定する請求項2に記載の画像処理装置。
【請求項4】
前記分割数は、前記第2の領域に含まれる画素数が予め定められた画素数に近くなるように求める請求項3に記載の画像処理装置。
【請求項5】
前記移動体は、列車であり、前記物体検出部は、列車が走行する軌道の周囲の物体を検出する請求項1に記載の画像処理装置。
【請求項6】
前記物体検出部は、前記軌道の周囲の物体として、信号機および保安員の少なくとも一方を検出する請求項5に記載の画像処理装置。
【請求項7】
前記画像は、複数のカメラを内蔵するステレオカメラにより撮像された画像である請求項1に記載の画像処理装置。
【請求項8】
前記代表値は、視差情報の最頻値、平均値、中央値およびk-meanの少なくとも一つである請求項1に記載の画像処理装置。
【請求項9】
前記移動体は、自動車であり、前記物体検出部は、衝突するおそれがある物体を検出する請求項1に記載の画像処理装置。
【請求項10】
移動体の前方を撮像する複数のカメラにて撮像した画像中の物体の3次元座標を算出する画像処理方法であって、
プロセッサがメモリに記録されたプログラムを実行することにより、
前記画像に基づき、視差情報を取得し、
前記画像を用いて物体の検出を行うとともに、前記画像中で物体の検出がされた箇所として第1の領域を設定し、
前記第1の領域内で視差情報が小さい箇所における視差情報の代表値を抽出し、
抽出された前記代表値に基づき、前記第1の領域の2次元座標を3次元座標に変換する、
画像処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、画像処理装置、画像処理方法、障害物検知システムに関する。本発明は、特に、移動体に搭載されたカメラにより撮像された画像中の物体の3次元座標を算出するのに適した画像処理装置等に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
近年、運転士の高齢化に伴う人材不足への懸念やオペレーションコストの低減などの理由により、既設の軌道輸送システムにおいて、運転を自動で行う研究が行われている。軌道上を輸送用車両が走行する軌道輸送システムでは、軌道上に障害物があった場合、操舵による回避が出来ないことから、軌道上の障害物を検知することは、軌道輸送システムの安全性や運用性を向上させるために重要である。現状は、運転士が軌道上および経路上の障害物を目視によって検知している。一方、無人運転を行うには、経路上の障害物を自動で検知する仕組みが必要となり、ミリ波レーダー、レーザーレーダー、カメラなど外界センサを用いる方法が研究されている。
【0003】
特許文献1には、対象物検出部で、過去の撮像画像から求められた対象物の路面上の位置、及び車両運動情報に基づいて、現在の対象物の路面上での位置を予測して、対応する現在の撮像画像上の位置に検出枠を設定することで対象物を検出することが記載されている。そして、第1の位置推定部で、検出枠範囲判定部で検出枠の下側領域が撮影範囲内であると判定された場合に、検出枠内の画像の足元位置に基づいて、対象物の現在位置を推定することが記載されている。さらに、第2の位置推定部で、検出サイズ判定部で検出枠のサイズが予め定めた大きさ以上であると判定された場合に、過去の撮像画像における対象物に対する現在の撮像画像における対象物の拡大率に基づいて、対象物の路面上の現在位置を推定することが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2011-65338号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
カメラにより撮像された画像を使用して軌道上の障害物を検知するには、画像中の物体を検出し、検出された物体の3次元座標が軌道の周囲に存在するか判別する必要がある。この場合、画像中の物体の2次元座標から3次元座標を推定する必要がある。
しかしながら、従来は、検出対象物の足元が見えていることを前提条件としているため、足元が見えていない場合、3次元座標を正しく推定できないことがある。
本発明は、撮像された画像内の物体の位置によらず、2次元座標から3次元座標を精度よく推定することができる画像処理装置、画像処理方法を提供することを目的とする。また、障害物を精度よく検知することができる障害物検知システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するため本発明は、移動体の前方を撮像する複数のカメラにて撮像した画像中の物体の3次元座標を算出する画像処理装置であって、画像に基づき、視差情報を取得する視差情報取得部と、画像を用いて物体の検出を行うとともに、画像中で物体の検出がされた箇所として第1の領域を設定する物体検出部と、第1の領域内で視差情報が小さい箇所における視差情報の代表値を抽出する視差情報抽出部と、視差情報抽出部により抽出された代表値に基づき、第1の領域の2次元座標を3次元座標に変換する座標変換部と、を備えることを特徴とする画像処理装置である。この場合、撮像された画像内の物体の位置によらず、2次元座標から3次元座標を精度よく推定することができる画像処理装置を提供できる。
【0007】
ここで、例えば、視差情報抽出部は、第1の領域内の視差情報のばらつきに応じて第1の領域を分割することで複数の第2の領域を設定し、複数の第2の領域の中で視差情報が小さくなる箇所における視差情報の代表値を抽出する。この場合、第1の領域内で物体が実際に存在する箇所を特定できる。
また、例えば、第2の領域は、第1の領域の大きさに基づき、画像の上下方向および左右方向の分割数を求め、分割数により第1の領域を分割することにより設定する。この場合、第2の領域に含まれる領域の大きさを概ね同じにすることができる。
さらに、例えば、分割数は、第2の領域に含まれる画素数が予め定められた画素数に近くなるように求める。この場合、第2の領域に含まれる領域の大きさを概ね同じにすることができる。
またさらに、例えば、移動体は、列車であり、物体検出部は、列車が走行する軌道の周囲の物体を検出する。この場合、列車に対し障害となる物体を検出できる。
そして、例えば、物体検出部は、軌道の周囲の物体として、信号機および保安員の少なくとも一方を検出する。この場合、検出する必要性が高い物体を検出できる。
また、例えば、画像は、複数のカメラを内蔵するステレオカメラにより撮像された画像である。この場合、遠距離の物体でも検出できる。
さらに、例えば、代表値は、視差情報の最頻値、平均値、中央値およびk-meanの少なくとも一つである。この場合、代表値として適したものが算出できる。
またさらに、例えば、移動体は、自動車であり、物体検出部は、衝突するおそれがある物体を検出する。この場合、自動車に対し障害となる物体を検出できる。
【0008】
また、本発明は、移動体の前方を撮像する複数のカメラにて撮像した画像中の物体の3次元座標を算出する画像処理方法であって、プロセッサがメモリに記録されたプログラムを実行することにより、画像に基づき、視差情報を取得し、画像を用いて物体の検出を行うとともに、画像中で物体の検出がされた箇所として第1の領域を設定し、第1の領域内で視差情報が小さい箇所における視差情報の代表値を抽出し、抽出された代表値に基づき、第1の領域の2次元座標を3次元座標に変換する、画像処理方法である。この場合、撮像された画像内の物体の位置によらず、2次元座標から3次元座標を精度よく推定することができる画像処理方法を提供できる。
【0009】
ここで、例えば、移動体は、列車であり、列車が走行する軌道の周囲の物体を検出する。この場合、列車に対し障害となる物体を検出できる。
また、例えば、軌道の周囲の物体として、信号機および保安員の少なくとも一方を検出する。この場合、検出する必要性が高い物体を検出できる。
さらに、例えば、画像は、複数のカメラを内蔵するステレオカメラにより撮像された画像である。この場合、遠距離の物体でも検出できる。
またさらに、例えば、代表値は、視差情報の最頻値、平均値、中央値およびk-meanの少なくとも一つである。この場合、代表値として適したものが算出できる。
【0010】
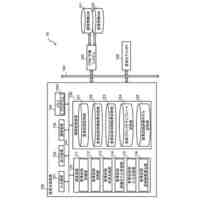
さらに、本発明は、障害物を検知する障害物検知システムであって、移動体の前方を撮像する複数のカメラにて撮像した画像中の物体の3次元座標を算出する画像処理装置と画像処理装置が算出した物体の3次元座標に応じて障害物を検知する検知装置と、を備え、画像処理装置は、画像に基づき、視差情報を取得する視差情報取得部と、画像を用いて物体の検出を行うとともに、画像中で物体の検出がされた箇所として第1の領域を設定する物体検出部と、第1の領域内で視差情報が小さい箇所における視差情報の代表値を抽出する視差情報抽出部と、視差情報抽出部により抽出された代表値に基づき、第1の領域の2次元座標を3次元座標に変換する座標変換部と、を備える障害物検知システムである。この場合、障害物を精度よく検知することができる障害物検知システムを提供できる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
対策計画作成支援装置
5日前
株式会社日立製作所
乗りかご及びエレベーター
5日前
株式会社日立製作所
認可システム及び認可方法
2日前
株式会社日立製作所
情報処理装置及び情報処理方法
5日前
株式会社日立製作所
知識抽出装置及び知識抽出方法
2日前
株式会社日立製作所
営業支援装置、及び営業支援方法
5日前
株式会社日立製作所
計算機システム及びデータ管理方法
4日前
株式会社日立製作所
計画分析方法及び計画分析システム
4日前
株式会社日立製作所
金融業務支援装置、金融業務支援方法
2日前
株式会社日立製作所
機器状態診断装置及び機器状態診断方法
2日前
株式会社日立製作所
サプライチェーンリスク評価装置および方法
2日前
株式会社日立製作所
配電計画作成装置および配電計画作成システム
5日前
株式会社日立製作所
外部記述から映像コンテキストを抽出する方法
2日前
株式会社日立製作所
電子システムおよび高速広帯域信号センシング方法
2日前
株式会社日立製作所
設備市場価値診断システムおよび設備市場価値診断方法
2日前
株式会社日立製作所
電力変換装置、電力変換装置の制御方法、エレベーター
3日前
株式会社日立製作所
インセンティブ管理システム及びインセンティブ管理方法
4日前
株式会社日立製作所
移動体群制御装置、移動体群制御システムおよび移動体群制御方法
4日前
株式会社日立製作所
オイル特性の推定モデルの生成方法、オイル特性の診断方法、およびオイル特性の診断システム
2日前
個人
対話装置
9日前
個人
物品給付年金
1か月前
個人
政治のAI化
1か月前
個人
情報処理装置
9日前
個人
RFタグ読取装置
1か月前
個人
在宅介護システム
1か月前
個人
情報処理装置
5日前
個人
プラグインホームページ
23日前
個人
AI飲食最適化プラグイン
1か月前
個人
情報入力装置
9日前
個人
物価スライド機能付生命保険
9日前
キヤノン株式会社
通信装置
1か月前
個人
電話管理システム及び管理方法
1か月前
個人
マイホーム非電子入札システム
9日前
個人
全アルゴリズム対応型プログラム
1か月前
キヤノン株式会社
画像処理装置
1か月前
株式会社BONNOU
管理装置
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ