TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025090185
公報種別
公開特許公報(A)
公開日
2025-06-17
出願番号
2023205267
出願日
2023-12-05
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20250610BHJP(信号)
要約
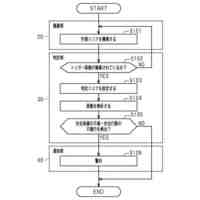
【課題】 、単眼カメラを用いて移動体と自車両との距離を検知し、当該距離に関する所定の条件が成立している場合に警報を発する車両制御装置であって、階段又は傾斜路を降下しつつ自車両に接近してくる移動体の安全性を高めることができる車両制御装置を提供する。
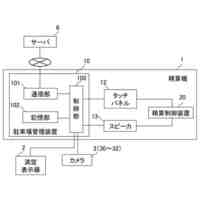
【解決手段】 車両制御装置1のプロセッサは、単眼カメラの撮像範囲の縦軸方向における移動体の画像の位置に基づいて自車両と当該移動体との第二距離を取得し、当該第二距離が自車両と静止物との第一距離よりも大きく、且つ、その差が閾値を超えている場合に、前記単眼カメラの撮像範囲内において前記移動体の画像が下方へ移動するとともに拡大した場合の当該移動体の画像の大きさの変化量に対する当該移動体の画像の位置の変化量である特徴量が所定値を超えている場合に、前記移動体への注意を喚起する警報処理の優先度を高める。
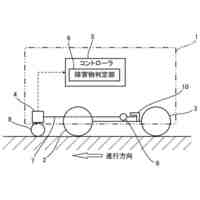
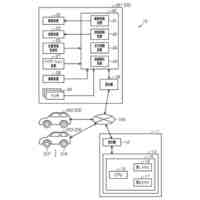
【選択図】 図2
特許請求の範囲
【請求項1】
自車両の進行方向における所定の第一領域に存在する物体と自車両との距離を取得する測距センサ、及び、自車両の進行方向における所定の第二領域を撮影する単眼カメラとを含む車載センサと、
前記測距センサによって取得された前記距離に基づいて、自車両の進行方向に位置する静止物と自車両との距離を第一距離として取得し、さらに、前記単眼カメラによって取得された画像に基づいて、自車両側へ向かって移動している移動体と自車両との距離を第二距離として取得し、前記第一距離に関する第一条件が成立している場合に、所定の第一警報が発せられるように報知装置を制御する第一警報処理と、前記第二距離に関する第二条件が成立している場合に、所定の第二警報が発せられるように報知装置を制御する第二警報処理と、を実行可能に構成されたプロセッサと、
を備えた車両制御装置であって、
前記プロセッサは、前記第一条件が成立し、且つ前記第二条件が成立している場合に、前記単眼カメラの撮像範囲の縦軸方向における前記移動体の画像の位置に基づいて前記第二距離を取得し、当該第二距離が前記第一距離よりも大きく、且つ、その差が閾値を超えている場合に、前記単眼カメラの撮像範囲内において前記移動体の画像が下方へ移動するとともに拡大した場合の当該移動体の画像の大きさの変化量に対する当該移動体の画像の位置の変化量である特徴量が所定値を超えている場合に、前記第一警報処理に対する前記第二警報処理の優先度を高める、ように構成された、車両制御装置。
続きを表示(約 580 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記所定値は、前記移動体が前記単眼カメラの光軸に対して平行に自車両側へ移動した場合の前記撮像範囲内における前記移動体の画像の大きさの変化量に対する、当該移動体の画像の位置の変化量である、車両制御装置。
【請求項3】
請求項1又は請求項2に記載の車両制御装置において、
前記静止物は階段であり、
前記移動体は、前記階段を下降している歩行者である、車両制御装置。
【請求項4】
請求項1に記載の車両制御装置において、
前記第一条件は、前記第一距離が第一閾値以下である場合に成立し、
前記第二条件は、前記第二距離が第二閾値以下である場合に成立し、
前記プロセッサは、前記特徴量が前記所定値を超えている場合に、前記第二条件のみが成立するように、前記第一閾値及び前記第二閾値を一時的に変更する、ように構成された、車両制御装置。
【請求項5】
請求項1に記載の車両制御装置において、
前記静止物は、自車両側への移動体の移動を規制する遮蔽物であり、
前記プロセッサは、前記遮蔽物が存在せず、且つ前記第二条件が成立している場合に、前記第二警報処理を実行する、
ように構成された、車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両と物体との距離に関する所定の条件が成立している場合に自車両の運転者に対して警報を発する車両制御装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
自車両と障害物との距離が閾値以下である場合に自車両の運転者に対して警報を発する車両制御装置が提案されている(例えば、下記特許文献1を参照。)。この車両制御装置(以下、「従来装置」と称呼する。)は、単眼カメラ及びプロセッサを備える。単眼カメラは、例えば、自車両の後方へ向けられている。単眼カメラは、所定のフレームレートで、自車両の後方の領域を撮影して得られた画像をプロセッサに提供する。プロセッサは、自車両が後退している場合に、単眼カメラから取得した複数の画像(撮影時刻の異なる複数の画像)を所定のアルゴリズムに従って処理することにより、自車両の後方に位置する物体と自車両との距離を演算する。
【先行技術文献】
【特許文献】
【0003】
特開2013-2883号公報
【発明の概要】
【0004】
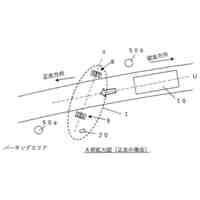
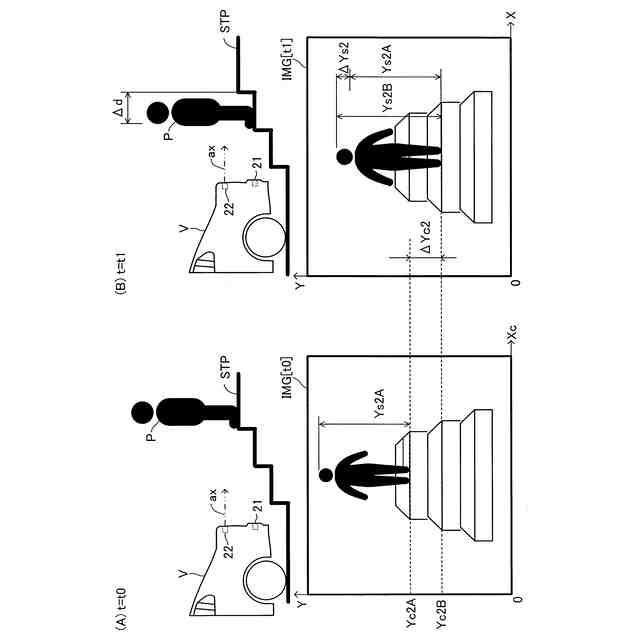
一般に、単眼カメラによって取得された画像IMGの上部に映り込んだ物体は、当該単眼カメラから比較的遠い位置にある物体である可能性が高い。一方、同画像IMGの下部に映り込んだ物体は、当該単眼カメラに比較的近い位置にある物体である可能性が高い。ただし、同画像IMGの上部に映り込んだ物体が、単眼カメラに比較的近い位置にあり、且つ、単眼カメラよりも高い位置にある物体である場合がある。よって、自車両に搭載された単眼カメラの撮像範囲内(画角内)における各物体の位置(画像における縦座標)のみに基づいて自車両と各物体との距離を推定(演算)した場合、その推定精度は低い。例えば、歩行者が、階段(又は傾斜路)を降下しつつ自車両に接近してくるシーンを単眼カメラで撮影した場合、当該歩行者が階段の最上段付近に位置している時点t0にて取得された画像IMG[t0]の上部に歩行者が映り込む可能性が高い。そのため、当該歩行者と自車両との距離が実際には比較的小さいにも関わらず、画像IMG[t0]の上部に歩行者が映り込んでいるために、誤って、自車両と当該歩行者との距離が比較的大きいと推定される虞がある。
【0005】
本発明の目的の一つは、単眼カメラを用いて移動体と自車両との距離を検知し、当該距離に関する所定の条件が成立している場合に警報を発する車両制御装置であって、階段又は傾斜路を降下しつつ自車両に接近してくる移動体の安全性を高めることができる車両制御装置を提供することにある。
【0006】
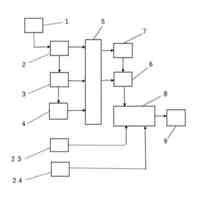
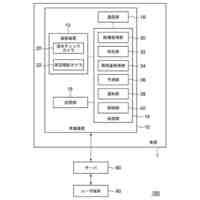
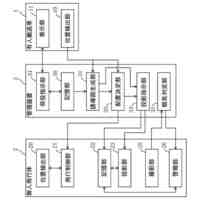
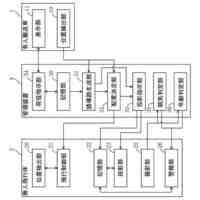
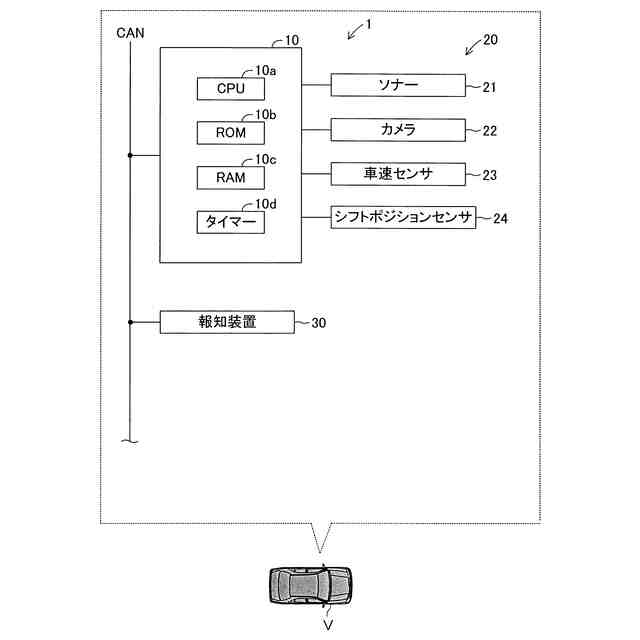
上記課題を解決するために、本発明の車両制御装置(1)は、
自車両(V)の進行方向における所定の第一領域に存在する物体と自車両との距離を取得する測距センサ(21)、及び、自車両の進行方向における所定の第二領域を撮影する単眼カメラ(22)とを含む車載センサ(20)と、
前記測距センサによって取得された前記距離に基づいて、自車両の進行方向に位置する静止物と自車両との距離を第一距離(ΔL1)として取得し、さらに、前記単眼カメラによって取得された画像(IMG)に基づいて、自車両側へ向かって移動している移動体と自車両との距離を第二距離(ΔL2)として取得し、前記第一距離に関する第一条件が成立している場合に、所定の第一警報が発せられるように報知装置(30)を制御する第一警報処理と、前記第二距離に関する第二条件が成立している場合に、所定の第二警報が発せられるように報知装置を制御する第二警報処理と、を実行可能に構成されたプロセッサ(10)と、
を備える。
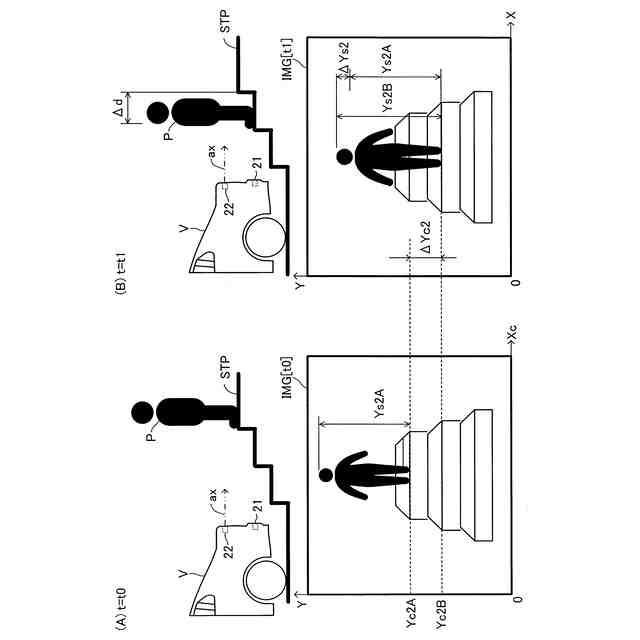
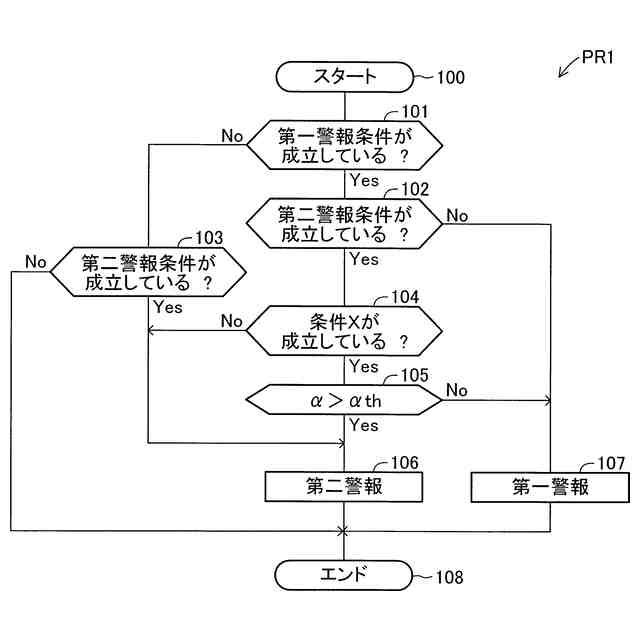
前記プロセッサは、前記第一条件が成立し、且つ前記第二条件が成立している場合に、前記単眼カメラの撮像範囲の縦軸方向における前記移動体の画像の位置(Yc)に基づいて前記第二距離を取得し、当該第二距離が前記第一距離よりも大きく、且つ、その差(ΔL)が閾値(ΔLth)を超えている場合に、前記単眼カメラの撮像範囲内において前記移動体の画像が下方へ移動するとともに拡大した場合の当該移動体の画像の大きさ(Ys)の変化量(ΔYs)に対する当該移動体の画像の位置(Yc)の変化量(ΔYc)である特徴量(α=ΔYc/ΔYs)が所定値(αth)を超えている場合に、前記第一警報処理に対する前記第二警報処理の優先度を高める、ように構成される。
【0007】
本発明に係る車両制御装置のプロセッサは、単眼カメラの撮像範囲内における移動体の画像の位置に基づいて第二距離を取得する。ただし、上述したように、移動体の画像の位置のみに基づいて取得した第二距離の精度が低い場合がある。例えば、第一距離(自車両との静止物との距離)に比べて、第二距離(自車両と移動体との距離)が比較的大きいと推定されたとしても、実際には、第一距離と第二距離との差が微小である場合がある。
【0008】
ここで、移動体が自車両側へ移動するシーンにおける当該移動体をその正面側から単眼カメラで撮影した場合、当該単眼カメラの撮像範囲内において、移動体の画像(例えば、移動体の画像の下端)が下方へ移動するとともに拡大する。そして、移動体が階段や傾斜路を下降しつつ自車両側へ移動するシーンにおいて、その鉛直方向の移動距離が大きいほど、特徴量(移動体の画像の大きさの変化量に対する当該移動体の画像の位置の変化量)が大きくなる。そこで、本発明において、当該特徴量が所定値を超えている場合に、第二距離(移動体の画像の位置のみに基づいて推定した距離)の精度(正確度)が低いとみなし、プロセッサは、第二警報処理の優先度を高める。これにより、移動体への注意喚起が優先され、移動体の安全性が高められる。
【0009】
本発明の一態様に係る車両制御装置において、
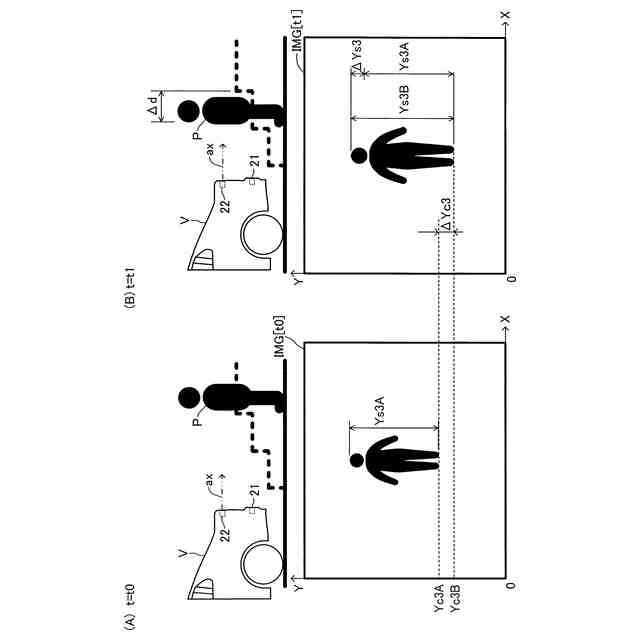
前記所定値は、前記移動体が前記単眼カメラの光軸(ax)に対して平行に自車両側へ移動した場合の前記撮像範囲内における前記移動体の画像の大きさの変化量に対する、当該移動体の画像の位置の変化量である。
【0010】
これによれば、移動体が単眼カメラの光軸に対して傾斜した方向へ下降しつつ自車両側へ移動してくる場合に、第二警報処理の優先度が高められる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
2か月前
個人
自動車ケアフル灯
2か月前
能美防災株式会社
発信機
2か月前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
1か月前
個人
逆走・正走車両検出システム
1か月前
アズビル株式会社
建物管理システム
19日前
日本信号株式会社
情報提供システム
1か月前
ホーチキ株式会社
異常報知設備
1か月前
ホーチキ株式会社
異常報知設備
1か月前
株式会社JVCケンウッド
通知システム
2か月前
個人
磁気・光学誘導路線による車両の運行制御
1か月前
タック株式会社
安全監視システム
2か月前
株式会社JVCケンウッド
情報処理装置
11日前
三菱ロジスネクスト株式会社
搬送システム
2か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
ホーチキ株式会社
非常通報システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
2か月前
株式会社フィットネスワン
見守りシステム
1か月前
株式会社アジラ
注目行動呼びかけシステム
2か月前
トヨタ自動車株式会社
配車システム
1か月前
トヨタ自動車株式会社
障害物検知装置
5日前
Adora株式会社
アプリ使用制御システム
1か月前
ユニティガードシステム株式会社
警備監視システム
16日前
能美防災株式会社
非常報知システム
1か月前
トヨタ自動車株式会社
車両
2か月前
シャープ株式会社
駐車場管理装置
27日前
東亜電子工業株式会社
警報コントローラ
2か月前
能美防災株式会社
火災感知器窓部清掃システム
3日前
株式会社エイビット
工事観測システム
17日前
トヨタ自動車株式会社
運転支援装置
1か月前
愛知時計電機株式会社
生活データ集計装置
2か月前
矢崎総業株式会社
路面監視装置
2か月前
株式会社アドヴィックス
走行支援システム
1か月前
トヨタ自動車株式会社
車両
26日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ