TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095847
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023212177
出願日
2023-12-15
発明の名称
圃場管理方法、圃場管理システム、プログラム
出願人
セイコーエプソン株式会社
代理人
弁理士法人明成国際特許事務所
主分類
A01G
7/00 20060101AFI20250619BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】基準板を設置した圃場における農作物の画像を用いて、光源情報の正確度を取得し、より正確な育成指標を算出する技術を提供する。
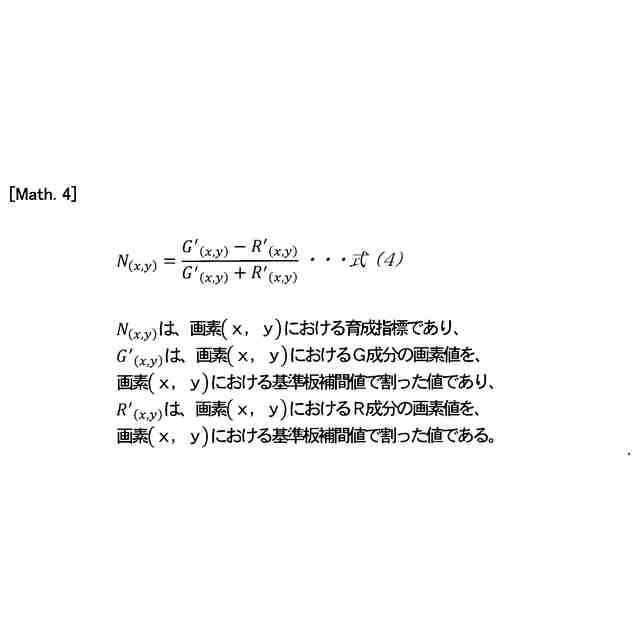
【解決手段】圃場管理方法は、圃場で栽培されている農作物および圃場に設置された基準板の画像を取得する画像取得工程と、基準板の正確度を算出する第1算出工程と、画像における各画素の正確度を算出する第2算出工程と、画像のうちで基準板とは異なる領域の画素値の補間値である基準板補間値を算出する補間値算出工程と、基準板補間値に対する画像の画素値の割合である反射率を算出する反射率算出工程と、育成指標を算出する育成指標算出工程と、育成指標算出工程により算出された育成指標および、第2算出工程により取得された画像における各画素の正確度を表示装置に表示する画像表示工程と、を有する。
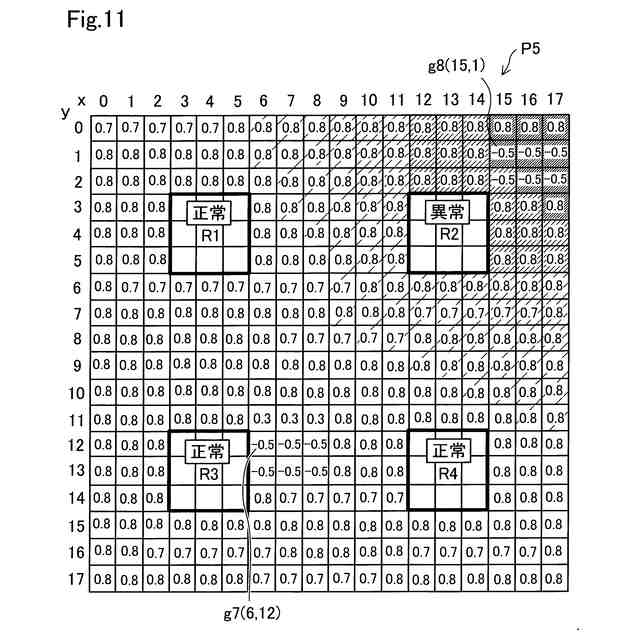
【選択図】図11
特許請求の範囲
【請求項1】
圃場管理方法であって、
圃場で栽培されている農作物および前記圃場に設置された基準板の画像を取得する画像取得工程と、
前記画像取得工程により取得された前記画像における前記基準板の画素値を用いて、前記基準板の正確度を算出する第1算出工程と、
前記第1算出工程により取得された前記基準板の正確度を用いて、前記画像における各画素の正確度を算出する第2算出工程と、
前記画像取得工程により取得された前記画像における前記基準板の画素値を用いて、前記画像のうちで前記基準板とは異なる領域の画素値の補間値である基準板補間値を算出する補間値算出工程と、
前記補間値算出工程により算出された前記基準板補間値を用いて、前記基準板補間値に対する前記画像の画素値の割合である反射率を算出する反射率算出工程と、
前記反射率算出工程により算出された前記反射率を用いて、育成指標を算出する育成指標算出工程と、
前記育成指標算出工程により算出された前記育成指標および、前記第2算出工程により取得された前記画像における前記各画素の正確度を表示装置に表示する画像表示工程と、を有する、
圃場管理方法。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の圃場管理方法であって、
前記画像表示工程は、前記育成指標および、前記画像における前記各画素の正確度を前記表示装置に重ねて前記表示する、圃場管理方法。
【請求項3】
請求項1に記載の圃場管理方法であって、
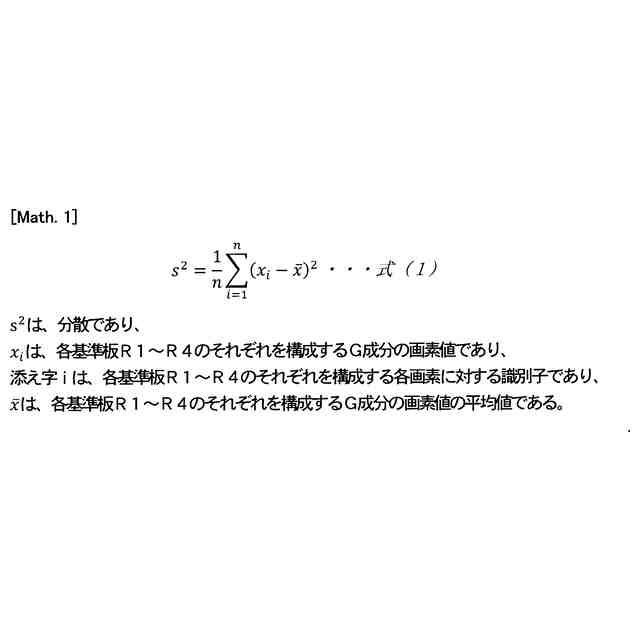
前記第1算出工程は、前記画像における前記基準板の画素値の分散を用いて前記基準板の正確度を算出する、圃場管理方法。
【請求項4】
請求項1に記載の圃場管理方法であって、
前記補間値算出工程は、前記画像を、前記基準板を含む区間である内挿区間と、前記画像のうち前記内挿区間以外の区間である外挿区間とに分ける工程と、
前記内挿区間における前記基準板補間値である内挿値および、前記外挿区間における前記基準板補間値である外挿値を算出する工程と、
前記内挿区間の画素に前記内挿値を割り当て、前記外挿区間の画素に前記外挿値を割り当てる工程と、を有する、圃場管理方法。
【請求項5】
請求項4に記載の圃場管理方法であって、
前記補間値算出工程は、前記内挿値を割り当てる前記内挿区間の画素と、前記画像中の前記基準板との距離および、前記基準板の画素値をもとに線形補間を用いて前記内挿値を算出する、圃場管理方法。
【請求項6】
請求項4に記載の圃場管理方法であって、
前記補間値算出工程は、前記外挿値を割り当てる前記外挿区間の画素に対して、最も近くに位置する前記内挿区間の画素における内挿値を、前記外挿値として算出する、圃場管理方法。
【請求項7】
請求項1に記載の圃場管理方法であって、
前記画像表示工程は、前記育成指標と、前記画像における前記各画素の正確度と、前記画像とを重ねて表示する、圃場管理方法。
【請求項8】
圃場管理装置であって、
圃場で栽培されている農作物および前記圃場に設置された基準板の画像を取得する画像取得部と、
前記画像取得部により取得された前記画像における前記基準板の画素値を用いて、前記基準板の正確度を算出する第1算出部と、
前記第1算出部により取得された前記基準板の正確度を用いて、前記画像における各画素の正確度を算出する第2算出部と、
前記画像取得部により取得された前記画像における前記基準板の画素値を用いて、前記画像のうちで前記基準板とは異なる領域の画素値の補間値である基準板補間値を算出する補間値算出部と、
前記補間値算出部により算出された前記基準板補間値を用いて、前記基準板補間値に対する前記画像の画素値の割合である反射率を算出する反射率算出部と、
前記反射率算出部により算出された前記反射率を用いて、育成指標を算出する育成指標算出部と、
前記育成指標算出部により算出された前記育成指標および、前記第2算出部により取得された前記画像における前記各画素の正確度を表示装置に表示する画像表示部と、を有する、
圃場管理装置。
【請求項9】
コンピュータープログラムであって、
圃場で栽培されている農作物および前記圃場に設置された基準板の画像を取得する画像取得機能と、
前記画像取得機能により取得された前記画像における前記基準板の画素値を用いて、前記基準板の正確度を算出する第1算出機能と、
前記第1算出機能により取得された前記基準板の正確度を用いて、前記画像における各画素の正確度を算出する第2算出機能と、
前記画像取得機能により取得された前記画像における前記基準板の画素値を用いて、前記画像のうちで前記基準板とは異なる領域の画素値の補間値である基準板補間値を算出する補間値算出機能と、
前記補間値算出機能により算出された前記基準板補間値を用いて、前記基準板補間値に対する前記画像の画素値の割合である反射率を算出する反射率算出機能と、
前記反射率算出機能により算出された前記反射率を用いて、育成指標を算出する育成指標算出機能と、
前記育成指標算出機能により算出された前記育成指標および、前記第2算出機能により取得された前記画像における前記各画素の正確度を表示装置に表示する画像表示機能と、
をコンピューターに実行させるための、コンピュータープログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、圃場管理方法、圃場管理システムおよびプログラムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
従来、圃場の情報化の観点から、圃場の農作物に関する情報を検出し、検出した情報から農作物の生育状況を予想および把握する圃場管理システムが知られている。特許文献1には、農作物の情報を検出する手段として、光源に対する農作物の反射光から育成指標を算出する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2016―49102号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
屋外において光源を受光する際、障害物等の外乱の影響により正確な光源の情報が取得できない場合が生じ得る。このように、正確性が不確かな光源情報から算出した農作物の育成指標は、正確性が低下する可能性が生じ得る。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
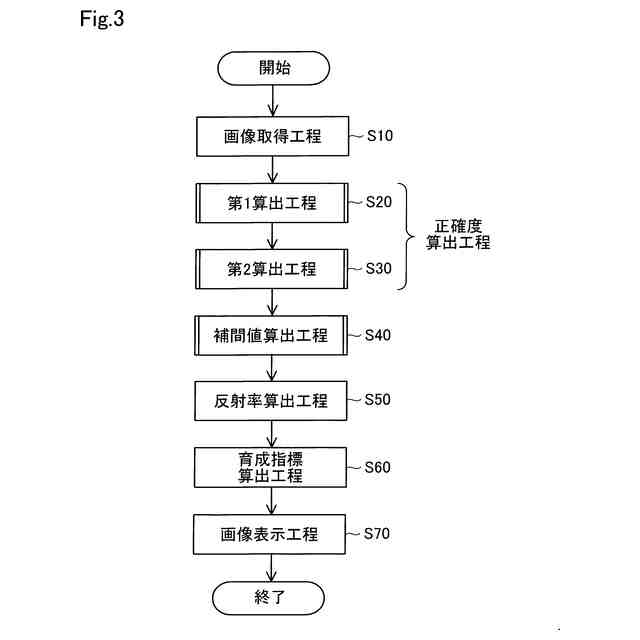
(1)本開示の第1の形態によれば、圃場管理方法が提供される。この圃場管理方法は、圃場で栽培されている農作物および前記圃場に設置された基準板の画像を取得する画像取得工程と、前記画像取得工程により取得された前記画像における前記基準板の画素値を用いて、前記基準板の正確度を算出する第1算出工程と、前記第1算出工程により取得された前記基準板の正確度を用いて、前記画像における各画素の正確度を算出する第2算出工程と、前記画像取得工程により取得された前記画像における前記基準板の画素値を用いて、前記画像のうちで前記基準板とは異なる領域の画素値の補間値である基準板補間値を算出する補間値算出工程と、前記補間値算出工程により算出された前記基準板補間値を用いて、前記基準板補間値に対する前記画像の画素値の割合である反射率を算出する反射率算出工程と、前記反射率算出工程により算出された前記反射率を用いて、育成指標を算出する育成指標算出工程と、前記育成指標算出工程により算出された前記育成指標および、前記第2算出工程により取得された前記画像における前記各画素の正確度を表示装置に表示する画像表示工程と、を有する。
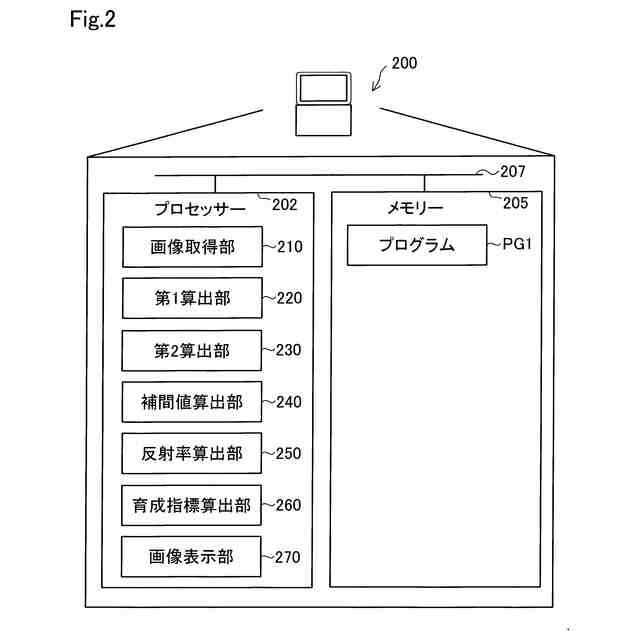
(2)本開示の第2の形態によれば、圃場管理装置が提供される。この圃場管理装置は、圃場で栽培されている農作物および前記圃場に設置された基準板の画像を取得する画像取得部と、前記画像取得部により取得された前記画像における前記基準板の画素値を用いて、前記基準板の正確度を算出する第1算出部と、前記第1算出部により取得された前記基準板の正確度を用いて、前記画像における各画素の正確度を算出する第2算出部と、前記画像取得部により取得された前記画像における前記基準板の画素値を用いて、前記画像のうちで前記基準板とは異なる領域の画素値の補間値である基準板補間値を算出する補間値算出部と、前記補間値算出部により算出された前記基準板補間値を用いて、前記基準板補間値に対する前記画像の画素値の割合である反射率を算出する反射率算出部と、前記反射率算出部により算出された前記反射率を用いて、育成指標を算出する育成指標算出部と、前記育成指標算出部により算出された前記育成指標および、前記第2算出部により取得された前記画像における前記各画素の正確度を表示装置に表示する画像表示部と、を有する。
(3)本開示の第3の形態によれば、コンピュータープログラムが提供される。このコンピュータープログラムは、圃場で栽培されている農作物および前記圃場に設置された基準板の画像を取得する画像取得機能と、前記画像取得機能により取得された前記画像における前記基準板の画素値を用いて、前記基準板の正確度を算出する第1算出機能と、前記第1算出機能により取得された前記基準板の正確度を用いて、前記画像における各画素の正確度を算出する第2算出機能と、前記画像取得機能により取得された前記画像における前記基準板の画素値を用いて、前記画像のうちで前記基準板とは異なる領域の画素値の補間値である基準板補間値を算出する補間値算出機能と、前記補間値算出機能により算出された前記基準板補間値を用いて、前記基準板補間値に対する前記画像の画素値の割合である反射率を算出する反射率算出機能と、前記反射率算出機能により算出された前記反射率を用いて、育成指標を算出する育成指標算出機能と、前記育成指標算出機能により算出された前記育成指標および、前記第2算出機能により取得された前記画像における前記各画素の正確度を表示装置に表示する画像表示機能と、をコンピューターに実行させる。
【図面の簡単な説明】
【0007】
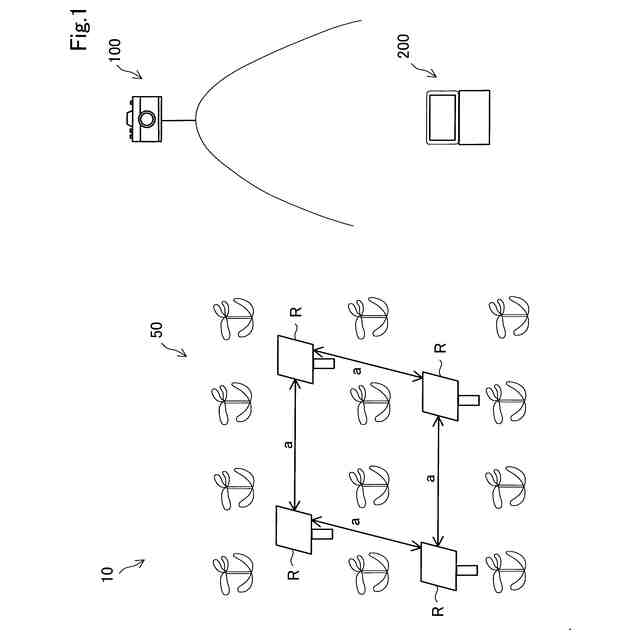
第1実施形態における圃場管理システムの構成を示す図。
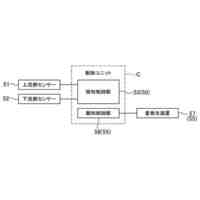
圃場管理装置の構成を示す図。
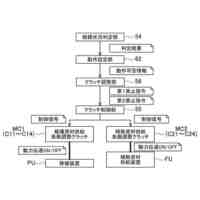
圃場管理装置を用いた圃場管理方法を示すフローチャート。
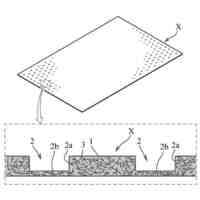
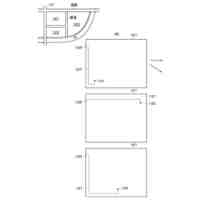
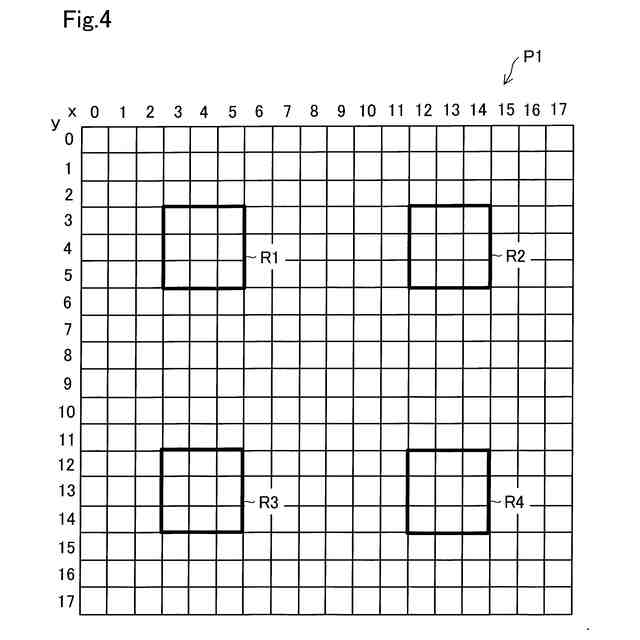
画像取得部により取得される画像の一例を模式的に示す図。
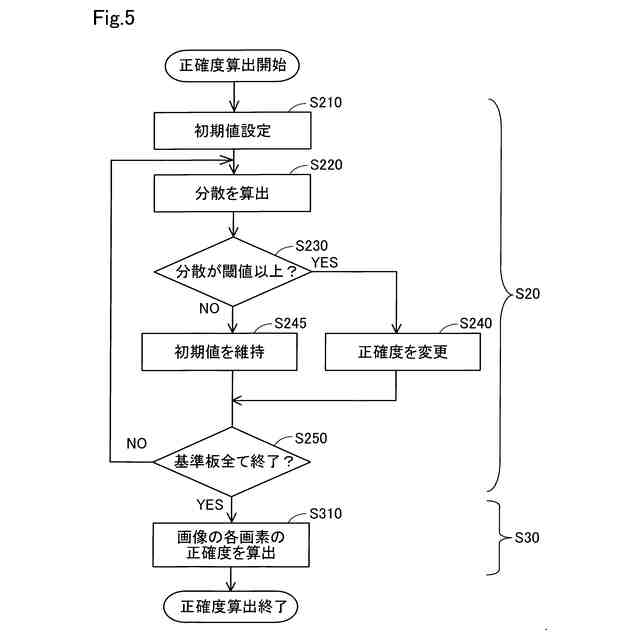
第1算出工程および第2算出工程を示すフローチャート。
基準板の正確度を説明するための図。
第2算出工程を説明するための図。
補間値算出工程を示すフローチャート。
内挿区間および外挿区間を説明するための図。
内挿値の算出方法を説明するための図。
画像表示部により表示された画像を示す図。
【発明を実施するための形態】
【0008】
A.第1実施形態:
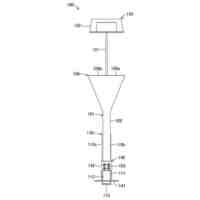
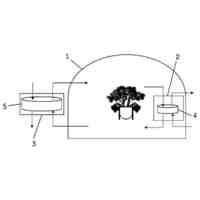
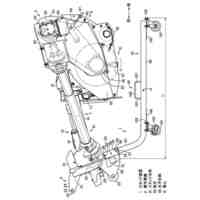
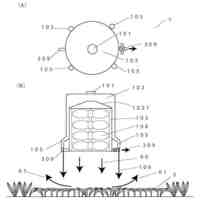
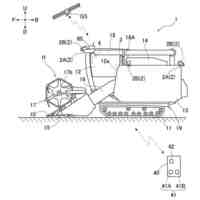
図1は、第1実施形態における圃場管理システム10の構成を示す図である。圃場管理システム10は、圃場50と、撮像装置100と、圃場管理装置200とを備える。
【0009】
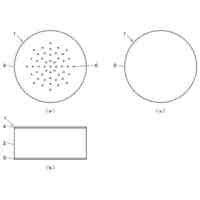
圃場50は、少なくとも1つ以上の基準板Rを有する。本実施形態において、圃場50は、4つの基準板Rを有する。4つの基準板Rは、一定の距離aをあけて等間隔に設置されている。4つの基準板Rは、矩形の角にそれぞれ配置されている。基準板Rは、正方形状の白色の板である。ここで、基準板Rは、入射光に含まれる全波長を拡散反射するという特徴を有する。よって、基準板Rは、無彩色であればよく、グレー等の他の色であってもよい。また、基準板Rは、正方形の板状に限られず、球や多面体等、他の形状であってもよい。なお、本実施形態において、基準板Rは、正確な光源情報を取得するために設置される。
【0010】
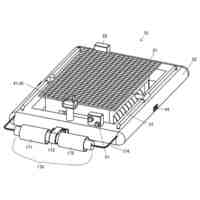
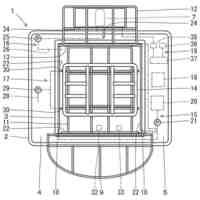
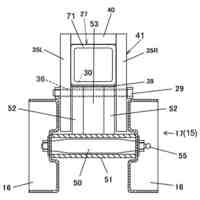
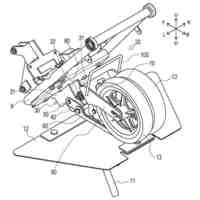
撮像装置100は、基準板Rを含む圃場50を撮像する。本実施形態において、撮像装置100は、カラーカメラである。また、撮像装置100は、高台に設置されており、定点撮影を行う。撮像装置100は、一定の期間ごとに繰り返し撮像を行う。例えば、撮像装置100は、1時間おきに3日間撮像を行う。なお、撮像条件は、上記に限られない。撮像装置100は、例えば、全天球カメラや分光カメラ等の他のカメラであってもよい。また、ドローン等に設置した撮像装置100を用いて、上空から圃場50を撮像してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
播種機
9日前
個人
尿処理材
24日前
井関農機株式会社
コンバイン
2日前
有限会社マイク
囲い罠
2日前
株式会社シマノ
釣り具
2日前
個人
室内栽培システム
5日前
井関農機株式会社
圃場管理装置
16日前
株式会社西部技研
空調システム
29日前
井関農機株式会社
圃場管理装置
10日前
井関農機株式会社
圃場管理装置
24日前
井関農機株式会社
移植機
9日前
井関農機株式会社
圃場管理装置
24日前
井関農機株式会社
圃場管理装置
24日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
9日前
株式会社シマノ
釣竿
26日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
9日前
株式会社ダイイチ
海苔網の酸処理船
5日前
株式会社山田鉄工
海苔網処理船
5日前
株式会社山田鉄工
海苔網処理船
5日前
株式会社山田鉄工
海苔網処理船
5日前
大栄工業株式会社
誘引剤収容容器
3日前
井関農機株式会社
作業車両
24日前
三菱マヒンドラ農機株式会社
耕耘作業機
26日前
松山株式会社
スタンド装置
9日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
9日前
株式会社クボタ
歩行型作業機
25日前
株式会社ドクター中松創研
農薬用ウクルマ
4日前
株式会社シマノ
釣糸ガイド及び釣竿
4日前
株式会社クボタ
田植機
9日前
株式会社クボタ
移植機
9日前
伯東株式会社
水処理組成物及び水処理方法
26日前
井関農機株式会社
水田管理システム
16日前
株式会社クボタ
収穫機
2日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ