TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025097140
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023213258
出願日
2023-12-18
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
,
株式会社デンソー
,
株式会社J-QuAD DYNAMICS
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/08 20120101AFI20250623BHJP(車両一般)
要約
【課題】減速制御の不要な継続を抑制できる車両制御装置を提供すること。
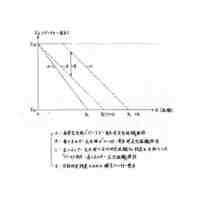
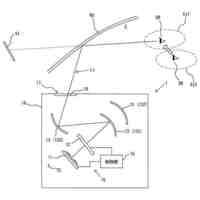
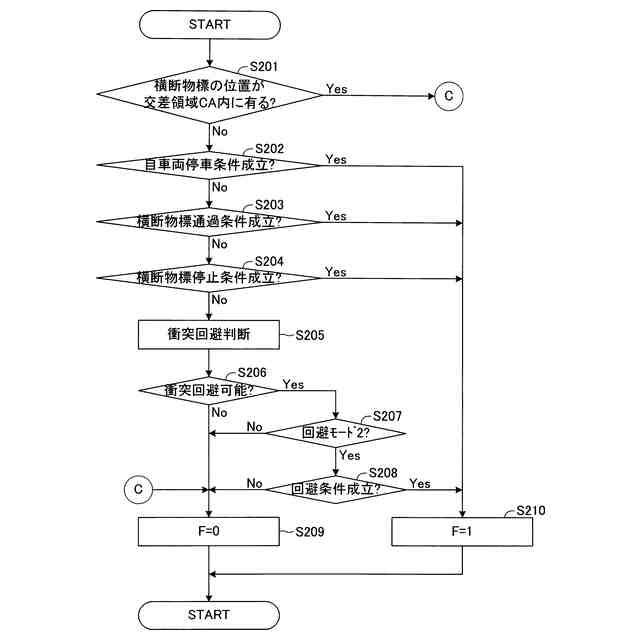
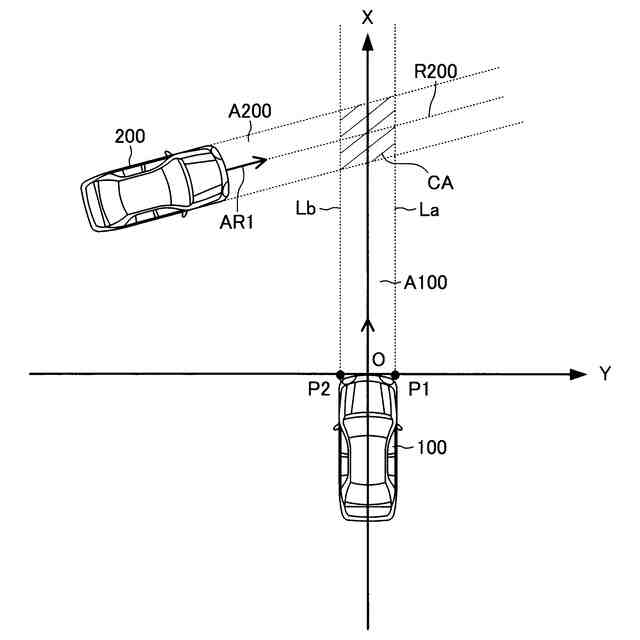
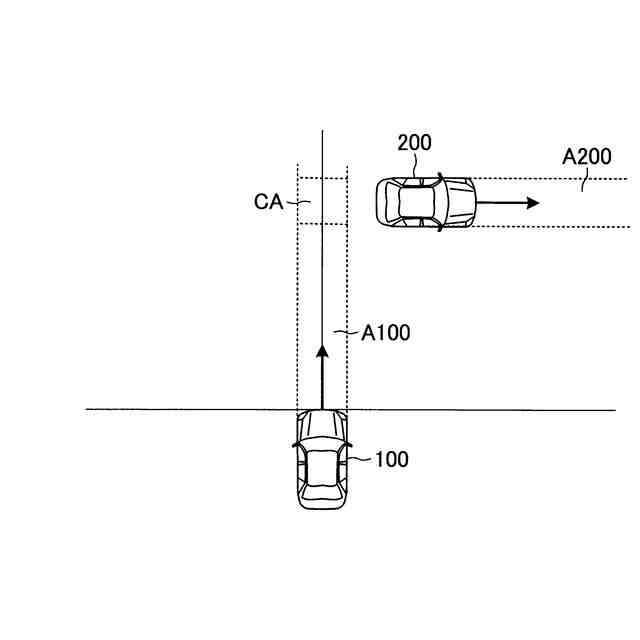
【解決手段】 車両制御装置1は、自車両100と横断物標200との衝突可能性が高いと判断した場合に自車両100が減速するように制動装置40を制御する減速制御を開始し、減速制御の実行中に所定の制御終了条件が成立した場合に減速制御を終了するように構成された車両制御ECU10を備える。制御終了条件は、横断物標200が自車両100の予測走行領域A100を横断する前であり且つ自車両100及び横断物標200が移動している場合に成否が判断される回避条件を含む。回避条件は、自車両100が交差領域CAを通り抜けるまでの予測時間である自車両通過予測時間T
1
と、横断物標200が交差領域CAに到達するまでの予測時間である横断物標到達予測時間T
2
とに基づいて設定される所定の条件が成立したときに成立する。
【選択図】 図13
特許請求の範囲
【請求項1】
自車両を制動する制動装置と、
前記自車両と前記自車両の予測走行領域を横断することが予測される物標である横断物標との衝突可能性が高いと判断した場合に前記自車両が減速するように前記制動装置を制御する減速制御を開始し、前記減速制御の実行中に所定の制御終了条件が成立した場合に前記減速制御を終了するように構成された制御部と、
を備える車両制御装置であって、
前記制御終了条件は、前記横断物標の位置が前記自車両の予測走行領域を横断する前の位置であり且つ前記自車両及び前記横断物標が移動している場合に成否が判断される条件であって、前記自車両が前記自車両の予測走行領域と前記横断物標の予測移動領域との交差領域を通り抜けるまでの予測時間である自車両通過予測時間と、前記横断物標が前記交差領域に到達するまでの予測時間である横断物標到達予測時間とに基づいて設定される所定の条件が成立したときに成立する回避条件を含む、
車両制御装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の車両制御装置であって、
前記回避条件は、前記自車両通過予測時間が前記横断物標到達予測時間よりも小さいときに成立する条件である、車両制御装置。
【請求項3】
請求項1に記載の車両制御装置であって、
前記自車両通過予測時間は、前記自車両が現在速度を維持すると仮定した場合に前記自車両が現在位置から前記交差領域を通り抜けるまでの予測時間であり、
前記横断物標到達予測時間は、前記横断物標が現在速度から所定の加速を実施すると仮定した場合に前記横断物標が現在位置から前記交差領域に到達するまでの予測時間であり、
前記回避条件は、前記自車両通過予測時間が前記横断物標到達予測時間よりも小さいときに成立する条件である、車両制御装置。
【請求項4】
請求項3に記載の車両制御装置であって、
前記横断物標到達予測時間は、前記横断物標が現在速度から所定の加速度及び所定の加速度勾配にて加速を実施すると仮定した場合に前記横断物標が現在位置から前記交差領域に到達するまでの予測時間である、車両制御装置。
【請求項5】
請求項2に記載の車両制御装置であって、
前記自車両通過予測時間は、前記自車両が現在速度を維持すると仮定した場合に前記自車両が現在位置から前記交差領域を通り抜けるまでの予測時間であり、
前記横断物標到達予測時間は、前記横断物標が現在速度を維持すると仮定した場合に前記横断物標が現在位置から前記交差領域に到達するまでの予測時間である、車両制御装置。
【請求項6】
請求項1乃至5のいずれか1項に記載の車両制御装置であって、
前記制御終了条件は、前記自車両が停車しているときに成立する自車両停車条件を含む、車両制御装置。
【請求項7】
請求項1乃至5のいずれか1項に記載の車両制御装置であって、
前記制御終了条件は、前記横断物標が前記交差領域を通り抜けたときに成立する横断物標通過条件を含む、車両制御装置。
【請求項8】
請求項1乃至5のいずれか1項に記載の車両制御装置であって、
前記制御終了条件は、前記横断物標が前記交差領域に到達する前に停止したときに成立する横断物標停止条件を含む、車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、減速制御を実行可能な車両制御装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
自車両と自車両の予測走行領域を横断することが予測される横断物標との衝突可能性が高い場合に自車両が減速するように自車両の制動装置を制御する減速制御を実行可能な車両制御装置が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-111335号公報
【発明の概要】
【0004】
特許文献1に開示の車両制御装置も含め、横断物標に対する減速制御を実行可能な従来の車両制御装置(以下、従来装置と呼称する場合もある)は、減速制御の実行中に、自車両と横断物標との衝突が確実に回避されると予測される場合に終了される。例えば、横断物標が停止した場合や、自車両の予測走行領域を横断物標が既に横断した場合に、減速制御が終了される。しかし、横断物標の位置が自車両の予測走行領域を横断する前の位置であって、且つ自車両及び横断物標が移動しているような場合には、横断物標のその後の挙動によっては自車両と横断物標が衝突する可能性があるため減速制御は終了されない。
【0005】
ところで、横断物標は、自車両の予測走行領域を横断する前に自車両を先に通過させるために停止することなく速度を低下させながら移動することがある。この場合には、減速制御を終了させて自車両を先に通過させるべきであるが、上述したように従来装置によれば横断物標が自車両の予測走行領域を横断する前の位置にて移動している場合には減速制御が終了されない。このため減速制御の継続が不必要であるときにも減速制御が作動しているという問題がある。
【0006】
本開示は、上記した課題を解決し得る車両制御装置を提供することを目的とする。すなわち本開示は、減速制御の継続が不要であるときに減速制御が継続されることを抑制できる車両制御装置を提供することを課題とする。
【0007】
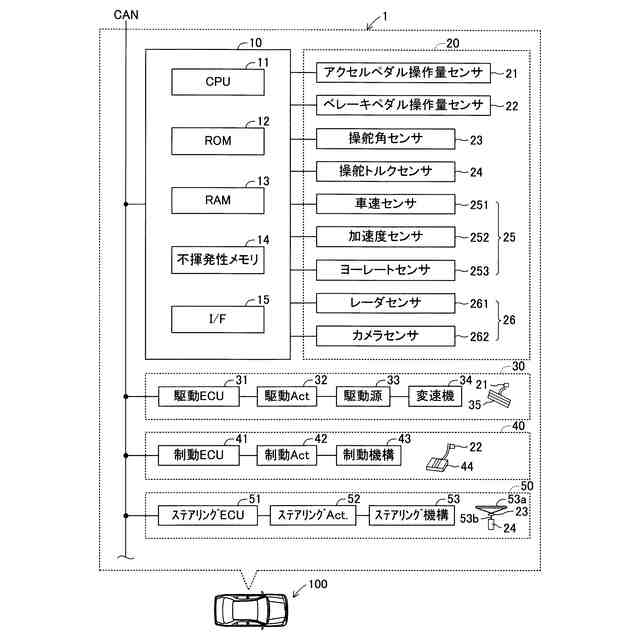
本開示に係る車両制御装置(1)は、自車両(100)を制動する制動装置(40)と、自車両(100)と自車両(100)の予測走行領域(A100)を横断することが予測される物標である横断物標(200)との衝突可能性が高いと判断した場合に自車両(100)が減速するように制動装置(40)を制御する減速制御を開始し、減速制御の実行中に所定の制御終了条件が成立した場合に減速制御を終了するように構成された制御部(10)と、を備える。そして、制御終了条件は、横断物標(200)の位置が自車両(100)の予測走行領域(A100)を横断する前の位置であり且つ自車両(100)及び横断物標(200)が移動している場合に成否が判断される条件であって、自車両(100)が自車両(100)の予測走行領域(A100)と横断物標(200)の予測移動領域(A200)との交差領域(CA)を通り抜けるまでの予測時間である自車両通過予測時間(T
1
)と、横断物標(200)が交差領域(CA)に到達するまでの予測時間である横断物標到達予測時間(T
2
)とに基づいて設定される所定の条件が成立したときに成立する回避条件を含む。
【0008】
本開示に係る車両制御装置によれば、横断物標の位置が自車両の予測走行領域を横断する前の位置であり且つ自車両及び横断物標が移動している場合であっても、自車両が交差領域を通り抜けるまでの時間と横断物標が交差領域に到達するまでの時間に基づいて設定される条件が成立したときには回避条件が成立する。そして、制御部は、減速制御の実行中に回避条件が成立した場合に制御終了条件が成立したと判断して減速制御を終了する。従って、横断物標が交差領域を通過する前に移動しているときにおいて、減速制御の継続が不要であるときに減速制御が継続されることを抑制することができる。
【0009】
本開示に係る車両制御装置の一態様において、回避条件は、自車両通過予測時間(T
1
)が横断物標到達予測時間(T
2
)よりも小さいときに成立する条件である。これによれば、回避条件は、自車両が交差領域を先に通過し、その後に横断物標が交差領域に到達すると予測される場合に成立する。このため回避条件が成立した時点で減速制御を終了しても、交差領域における自車両と横断物標との衝突が回避される。
【0010】
本開示に係る車両制御装置の他の一態様において、自車両通過予測時間(T
1
)は、自車両(100)が現在速度を維持すると仮定した場合に自車両(100)が現在位置から交差領域(CA)を通り抜けるまでの予測時間であり、横断物標到達予測時間(T
2
)は、横断物標(200)が現在速度から所定の加速を実施すると仮定した場合に横断物標(200)が現在位置から交差領域に到達するまでの予測時間であり、回避条件は、自車両通過予測時間(T
1
)が横断物標到達予測時間(T
2
)よりも小さいときに成立する条件である。これによれば、横断物標が加速して交差領域に到達するよりも先に自車両が交差領域を通過すると予測される場合に、回避条件が成立して減速制御が終了される。このため回避条件が成立した時点で減速制御を終了した後に横断物標が加速した場合であっても、交差領域における自車両と横断物標との衝突を回避することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
1か月前
個人
車窓用防虫網戸
1か月前
個人
警告装置
2か月前
個人
小型EVシステム
2か月前
日本精機株式会社
ケース
2か月前
個人
車輪清掃装置
1か月前
個人
ホイルのボルト締結
4日前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
24日前
個人
キャンピングトライク
19日前
個人
車両用スリップ防止装置
10日前
個人
ブレーキシステム
3か月前
個人
ワイパーゴム性能保持具
1か月前
個人
アクセルのソフトウェア
9日前
個人
キャンピングトレーラー
19日前
横浜ゴム株式会社
タイヤ
3か月前
株式会社ニフコ
保持装置
3日前
個人
自動車ドア開度規制ベルト
2か月前
日本精機株式会社
車載表示装置
5日前
井関農機株式会社
収穫作業車両
1か月前
株式会社クラベ
ヒータユニット
1か月前
個人
車載小物入れ兼雨傘収納具
2日前
日本精機株式会社
車両用投影装置
26日前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用投影装置
26日前
日本精機株式会社
車両用表示装置
10日前
株式会社ユーシン
照明装置
2か月前
トヨタ自動車株式会社
車両
23日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
16日前
帝国繊維株式会社
作業車両
2か月前
日本精機株式会社
車両用表示装置
1か月前
エムケー精工株式会社
車両処理装置
3か月前
エムケー精工株式会社
車両処理装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ