TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025098607
公報種別
公開特許公報(A)
公開日
2025-07-02
出願番号
2023214851
出願日
2023-12-20
発明の名称
車両用制御装置
出願人
ダイハツ工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B60Q
1/115 20060101AFI20250625BHJP(車両一般)
要約
【課題】車体傾斜角の真値を算出する際の演算誤差を減らすことが可能な車両用制御装置を提供することである。
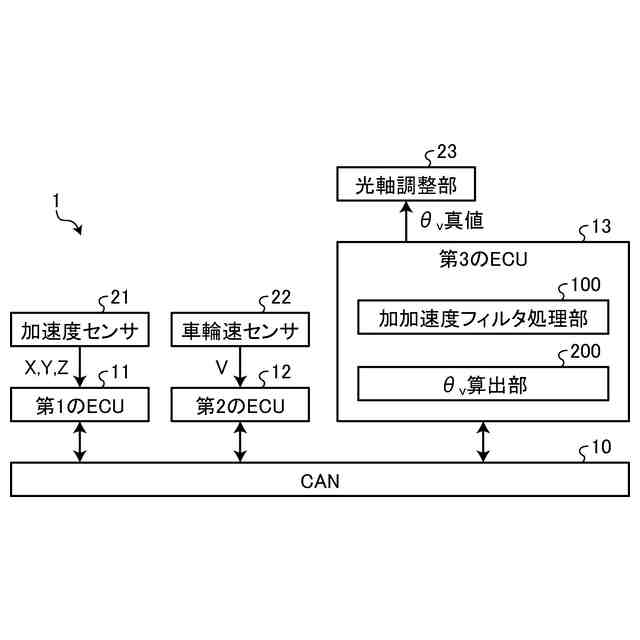
【解決手段】本発明に係る車両用制御装置は、車体傾斜角を算出してヘッドライトの光軸を制御する車両用制御装置であって、加速度センサにより検出された加速度情報および車輪速センサにより検出された速度情報が所定範囲か所定範囲外かを判定する判定部と、共に所定範囲となる複数の前記加速度情報および前記速度情報に基づき前記車体傾斜角を算出する算出部と、を有し、前記判定部は、前記所定範囲か前記所定範囲外かを、少なくとも前記加速度情報を時間微分した加加速度情報が所定範囲か所定範囲外かにより判定する判定部を含むことを特徴とする。
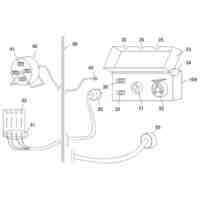
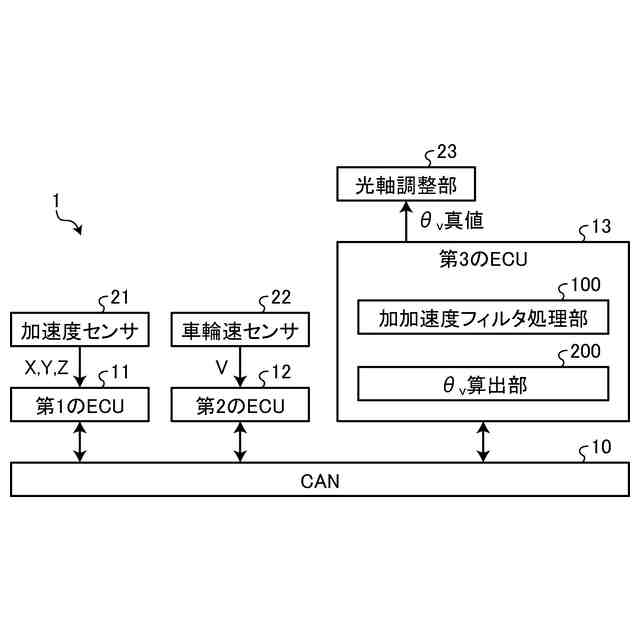
【選択図】図1
特許請求の範囲
【請求項1】
車体傾斜角を算出してヘッドライトの光軸を制御する車両用制御装置であって
加速度センサにより検出された加速度情報および車輪速センサにより検出された速度情報が所定範囲か所定範囲外かを判定する判定部と、
共に所定範囲となる複数の前記加速度情報および前記速度情報に基づき前記車体傾斜角を算出する算出部と、
を有し、
前記判定部は、前記所定範囲か前記所定範囲外かを、少なくとも前記加速度情報を時間微分した加加速度情報が所定範囲か所定範囲外かにより判定する判定部を含む、
ことを特徴とする車両用制御装置。
続きを表示(約 130 文字)
【請求項2】
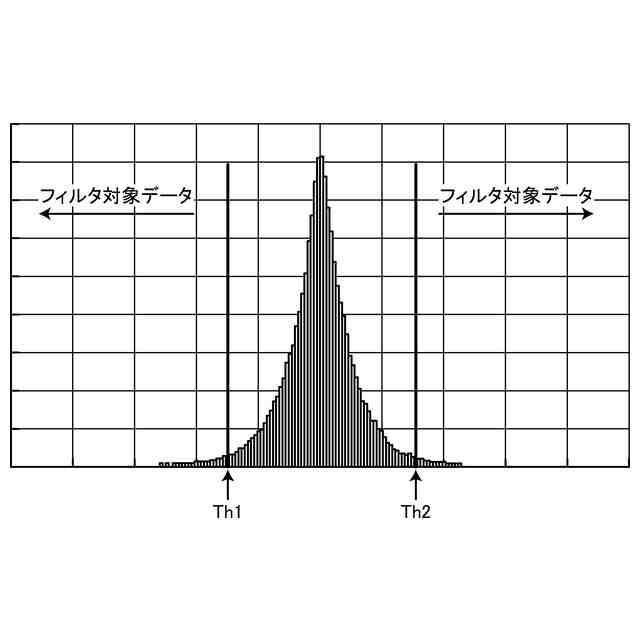
前記判定部は、前記加加速度情報が所定範囲か所定範囲外かを閾値を基準に判定し、
前記閾値は、車両が所定時間以上定常走行した際において加加速度値がとる範囲の中から設定される、
ことを特徴とする請求項1に記載の車両用制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両用制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
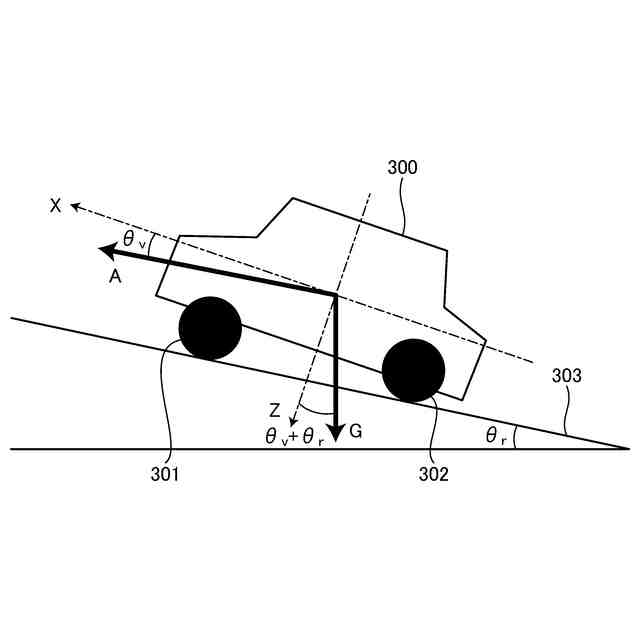
従来、車両のヘッドライトの光軸を制御するオートレベリング制御技術がある。車輪速センサの出力から演算した車両速度を時間微分した加速度値と、加速度センサの出力値と、重力加速度とを使って、所定の関係式から路面の傾斜角(路面傾斜角という)と路面に対する車体の傾斜角(車体傾斜角という)とを求め、傾斜角が所定量変化したときに車両のヘッドライトの光軸を制御する。
【0003】
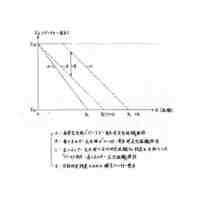
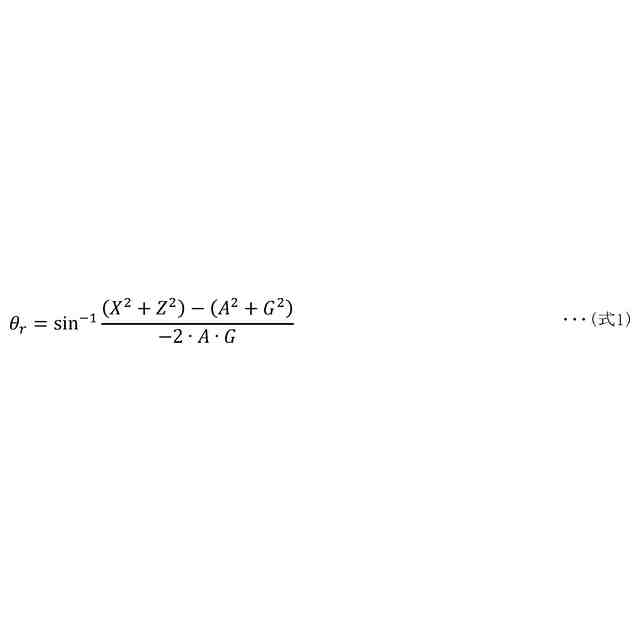
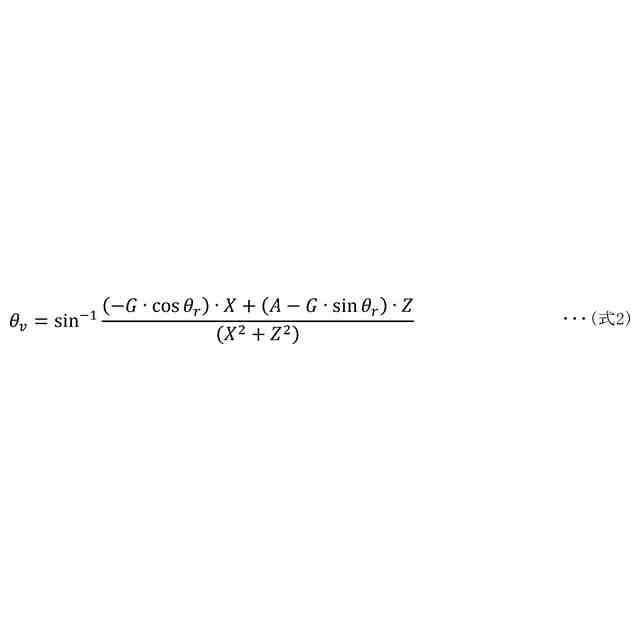
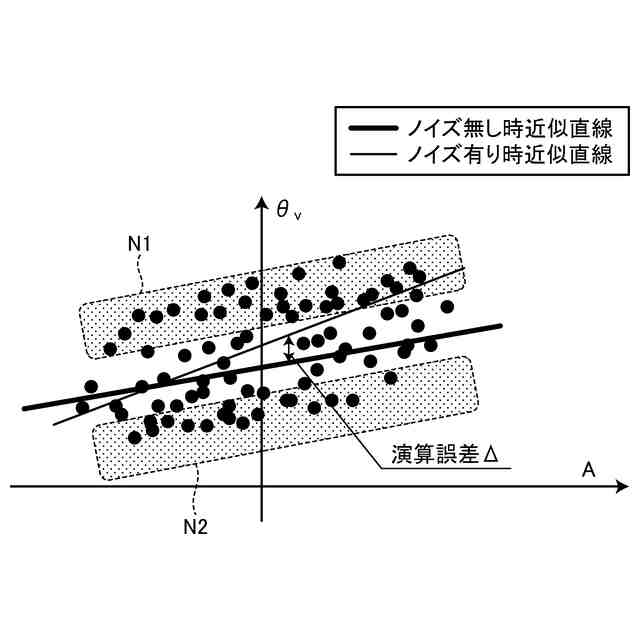
特許文献1に記載されているオートレベリング制御技術は、走行中に検出される車体加速度Aと車体傾斜角θvの値を、第一軸を車体加速度Aとし第二軸を車体傾斜角θvとする2次元座標にプロットし、プロットした点に基づく近似直線が第1軸(θv)と交わる切片を車体傾斜角θvの真値として使用する。このように車体傾斜角θvの真値を算出する方式では車体のノーズアップおよびノーズダウンの影響を排除したオートレベリング制御が可能になる。
【先行技術文献】
【特許文献】
【0004】
特開2023-104163号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、急加速や、急ブレーキや、急旋回などのように所定範囲を上回る加速度変化が生じたときのセンサ出力の成分を含めて車体傾斜角の真値を算出すると演算誤差が生じ、そのときの車体傾斜角は真値からはずれる。従来の構成では、その成分が除去しきれず、走行中にヘッドライトの光軸が所望の向きに制御されないことがある。
【0006】
本発明の目的は、車体傾斜角の真値を算出する際の演算誤差を減らすことが可能な車両用制御装置を提供することである。
【課題を解決するための手段】
【0007】
前記の目的を達成するため、本発明に係る車両用制御装置は、車体傾斜角を算出してヘッドライトの光軸を制御する車両用制御装置であって、加速度センサにより検出された加速度情報および車輪速センサにより検出された速度情報が所定範囲か所定範囲外かを判定する判定部と、共に所定範囲となる複数の前記加速度情報および前記速度情報に基づき前記車体傾斜角を算出する算出部と、を有し、前記判定部は、前記所定範囲か前記所定範囲外かを、少なくとも前記加速度情報を時間微分した加加速度情報が所定範囲か所定範囲外かにより判定する判定部を含む、ことを特徴とする。
【発明の効果】
【0008】
本発明によれば、車体傾斜角の真値を算出する際の演算誤差を減らすことが可能になる。
【図面の簡単な説明】
【0009】
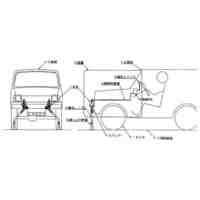
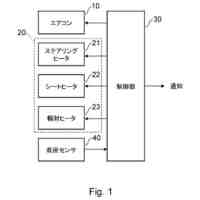
図1は、実施の形態にかかる車両用制御装置の構成の一例を示す図である。
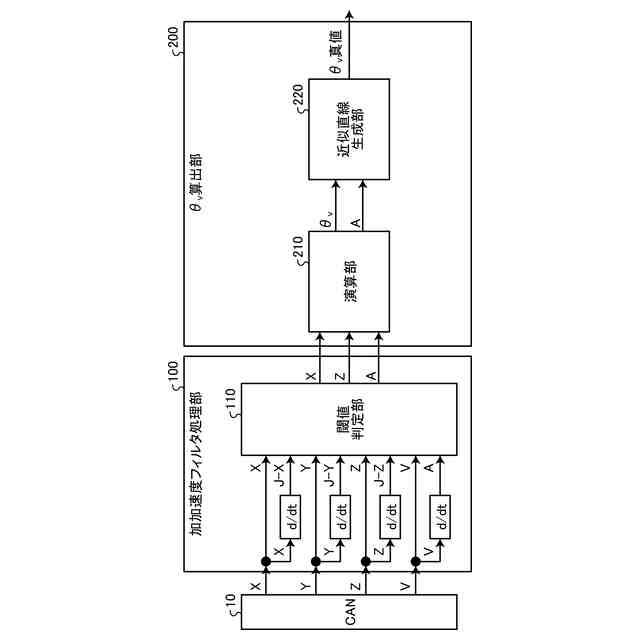
図2は、第3のECUの処理ブロックの構成の一例を示す図である。
図3は、演算部が実装する関係式の説明図である。
図4は、近似直線生成部が生成する近似直線の説明図である。
図5は、加加速度情報の閾値を決める方法の一例を示す図である。
図6は、加加速度情報を使用した場合の点分布の変化を示す図である。
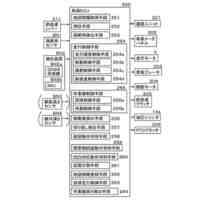
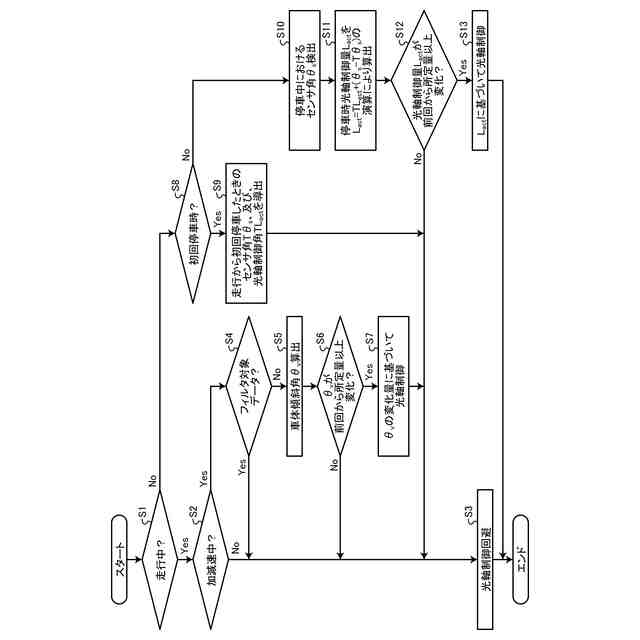
図7は、車両によるヘッドライトの光軸制御フローの一例を示す図である。
【発明を実施するための形態】
【0010】
以下では、添付図面を参照し、本発明の実施の形態である車両用制御装置について詳細に説明する。なお、以下において「算出」と「導出」は同義の意味で使用する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
1か月前
個人
警告装置
2か月前
個人
車窓用防虫網戸
2か月前
個人
小型EVシステム
3か月前
日本精機株式会社
ケース
3か月前
個人
ホイルのボルト締結
13日前
個人
車輪清掃装置
1か月前
井関農機株式会社
作業車両
1か月前
個人
キャンピングトライク
28日前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
3か月前
個人
キャンピングトレーラー
28日前
個人
車両用スリップ防止装置
19日前
個人
アクセルのソフトウェア
18日前
個人
ワイパーゴム性能保持具
1か月前
個人
ブレーキシステム
3か月前
株式会社クラベ
ヒータユニット
2か月前
井関農機株式会社
収穫作業車両
2か月前
横浜ゴム株式会社
タイヤ
3か月前
日本精機株式会社
車載表示装置
14日前
個人
車載小物入れ兼雨傘収納具
11日前
株式会社ニフコ
保持装置
12日前
個人
自動車ドア開度規制ベルト
3か月前
トヨタ自動車株式会社
車両
1か月前
井関農機株式会社
作業車両
25日前
井関農機株式会社
作業車両
25日前
株式会社ユーシン
照明装置
3か月前
日本精機株式会社
車両用表示装置
1か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
車両用投影装置
1か月前
日本精機株式会社
車両用表示装置
2か月前
日本精機株式会社
車両用投影装置
1か月前
日本精機株式会社
車両用表示装置
19日前
株式会社ユーシン
照明装置
2か月前
帝国繊維株式会社
作業車両
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ