TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100574
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2025061440,2023045825
出願日
2025-04-02,2018-05-16
発明の名称
ビデオ符号化方法および装置
出願人
華為技術有限公司
,
HUAWEI TECHNOLOGIES CO.,LTD.
代理人
個人
,
個人
主分類
H04N
19/105 20140101AFI20250626BHJP(電気通信技術)
要約
【課題】例えば、ビデオ符号化技術の分野に関する。
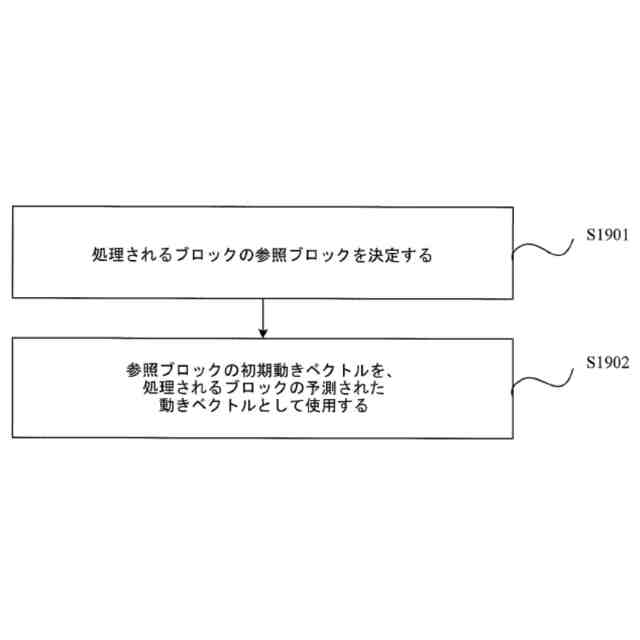
【解決手段】本出願の実施形態は、処理されるブロックの参照ブロックを決定するステップであって、参照ブロックと処理されるブロックとが、事前設定された時間的または空間的な相関関係を有し、参照ブロックが、初期動きベクトルおよび1つまたは複数の事前設定された動きベクトルオフセットを有し、参照ブロックの初期動きベクトルが、参照ブロックの予測された動きベクトルに基づいて取得され、参照ブロックの予測ブロックが、初期動きベクトルおよび1つまたは複数の事前設定された動きベクトルオフセットに基づいて取得される、ステップと、参照ブロックの初期動きベクトルを、処理されるブロックの予測された動きベクトルとして使用するステップとを含む、動きベクトルを取得するための方法を開示する。
【選択図】図19
特許請求の範囲
【請求項1】
処理されるブロックの参照ブロックを決定するステップであって、前記参照ブロックと前記処理されるブロックとが、事前設定された時間的または空間的な相関関係を有し、前記参照ブロックが、初期動きベクトルおよび1つまたは複数の事前設定された動きベクトルオフセットを有し、前記参照ブロックの前記初期動きベクトルが、前記参照ブロックの予測された動きベクトルに基づいて取得され、前記参照ブロックの予測ブロックが、前記初期動きベクトルおよび前記1つまたは複数の事前設定された動きベクトルオフセットに基づいて取得される、ステップと、
前記参照ブロックの前記初期動きベクトルを、前記処理されるブロックの予測された動きベクトルとして使用するステップと
を含む、動きベクトルを取得するための方法。
続きを表示(約 2,200 文字)
【請求項2】
前記参照ブロックの前記初期動きベクトルが、以下の方式で、すなわち、
前記参照ブロックの前記予測された動きベクトルを、前記参照ブロックの前記初期動きベクトルとして使用するステップ、または
前記参照ブロックの前記初期動きベクトルを取得するために、前記参照ブロックの前記予測された動きベクトルと前記参照ブロックの動きベクトルの差分とを加算するステップ
で特に取得される、請求項1に記載の方法。
【請求項3】
前記参照ブロックの前記予測ブロックが、以下の方式で、すなわち、
前記参照ブロックの参照フレームから、前記参照ブロックの前記初期動きベクトルによって示されるピクチャブロックを取得し、前記取得されたピクチャブロックを、前記参照ブロックの一時的な予測ブロックとして使用するステップと、
1つまたは複数の実際の動きベクトルを取得するために、前記参照ブロックの前記初期動きベクトルと前記1つまたは複数の事前設定された動きベクトルオフセットとを加算するステップであって、各実際の動きベクトルが探索位置を示す、ステップと、
前記1つまたは複数の実際の動きベクトルによって示される探索位置において1つまたは複数の候補予測ブロックを取得するステップであって、各探索位置が1つの候補予測ブロックに対応する、ステップと、
前記1つまたは複数の候補予測ブロックから、前記一時的な予測ブロックとのピクセル差分が最小である候補予測ブロックを、前記参照ブロックの前記予測ブロックとして選択するステップと
で特に取得される、請求項1または2に記載の方法。
【請求項4】
前記方法が双方向予測に使用され、前記参照フレームが、第1の方向の参照フレームと第2の方向の参照フレームとを含み、前記初期動きベクトルが、第1の方向の初期動きベクトルと第2の方向の初期動きベクトルとを含み、前記参照ブロックの参照フレームから、前記参照ブロックの前記初期動きベクトルによって示されるピクチャブロックを取得し、前記取得されたピクチャブロックを、前記参照ブロックの一時的な予測ブロックとして使用する、前記ステップが、
前記参照ブロックの前記第1の方向の参照フレームから、前記参照ブロックの前記第1の方向の初期動きベクトルによって示される第1のピクチャブロックを取得するステップと、
前記参照ブロックの前記第2の方向の参照フレームから、前記参照ブロックの前記第2の方向の初期動きベクトルによって示される第2のピクチャブロックを取得するステップと、
前記参照ブロックの前記一時的な予測ブロックを取得するために、前記第1のピクチャブロックと前記第2のピクチャブロックとに重み付けするステップと
を含む、請求項3に記載の方法。
【請求項5】
前記実際の動きベクトルの動きベクトル解像度が事前設定されたピクセル精度よりも高い場合、処理された実際の動きベクトルの動きベクトル解像度が前記事前設定されたピクセル精度に等しくなるように、前記実際の動きベクトルの前記動きベクトル解像度を丸めるステップ
をさらに含む、請求項3または4に記載の方法。
【請求項6】
前記1つまたは複数の候補予測ブロックから、前記一時的な予測ブロックとのピクセル差分が最小である候補予測ブロックを、前記参照ブロックの前記予測ブロックとして選択する、前記ステップが、
前記1つまたは複数の候補予測ブロックから、前記一時的な予測ブロックとのピクセル差分が最小である前記候補予測ブロックに対応する実際の動きベクトルを選択するステップと、
前記選択された実際の動きベクトルの動きベクトル解像度が事前設定されたピクセル精度よりも高い場合、処理された選択された実際の動きベクトルの動きベクトル解像度が前記事前設定されたピクセル精度に等しくなるように、前記選択された実際の動きベクトルの前記動きベクトル解像度を丸めるステップと、
前記処理された選択された実際の動きベクトルによって示される位置に対応する予測ブロックが、前記参照ブロックの前記予測ブロックであると決定するステップと
を含む、請求項3または4に記載の方法。
【請求項7】
前記事前設定されたピクセル精度が、整数ピクセル精度、1/2ピクセル精度、1/4ピクセル精度、または1/8ピクセル精度である、請求項5または6に記載の方法。
【請求項8】
前記処理されるブロックの前記予測された動きベクトルを、前記処理されるブロックの初期動きベクトルとして使用するステップ
をさらに含む、請求項1から7のいずれか一項に記載の方法。
【請求項9】
前記処理されるブロックの初期動きベクトルを取得するために、前記処理されるブロックの前記予測された動きベクトルと前記処理されるブロックの動きベクトルの差分とを加算するステップ
をさらに含む、請求項1から7のいずれか一項に記載の方法。
【請求項10】
前記方法がビデオ復号に使用され、前記処理されるブロックの前記動きベクトルの差分が、ビットストリームにおける第1の識別情報を解析することによって取得される、請求項9に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本出願は、ビデオ符号化技術の分野に関し、詳細には、ビデオ符号化方法および装置に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
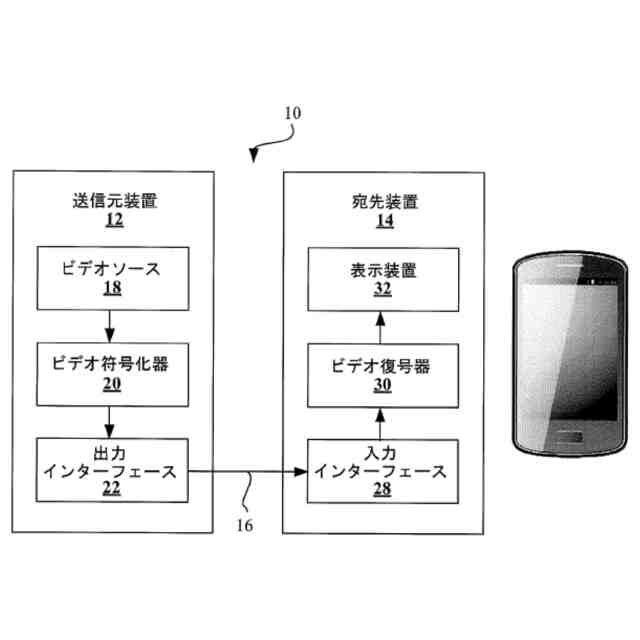
デジタルビデオ技術は、デジタルテレビ、デジタルライブ放送システム、ワイヤレス放送システム、携帯情報端末(PDA)、ノートブックコンピュータ、タブレットコンピュータ、電子書籍リーダ、デジタルカメラ、デジタル記録装置、デジタルメディアプレーヤ、ビデオゲーム装置、ビデオゲームコンソール、携帯電話または衛星無線電話、ビデオ会議装置、ビデオストリーミング伝送装置などを含む様々な装置に広く適用され得る。デジタルビデオ装置は、ビデオ復号技術、例えば、MPEG-2、MPEG-4、ITU-T勧告H.263、ITU-T勧告H.264/MPEG-4パート10高度ビデオ復号方式(advanced video coding、AVC)、ITU-T勧告H.265(高効率ビデオ復号方式(HEVC)とも呼ばれる)、およびこれらの規格の拡張部分で説明されているビデオ復号技術を実装している。デジタルビデオ装置は、これらのビデオ復号技術を実装することによって、デジタルビデオ情報をより効率的に送信、受信、符号化、復号、および/または記憶することができる。
【0003】
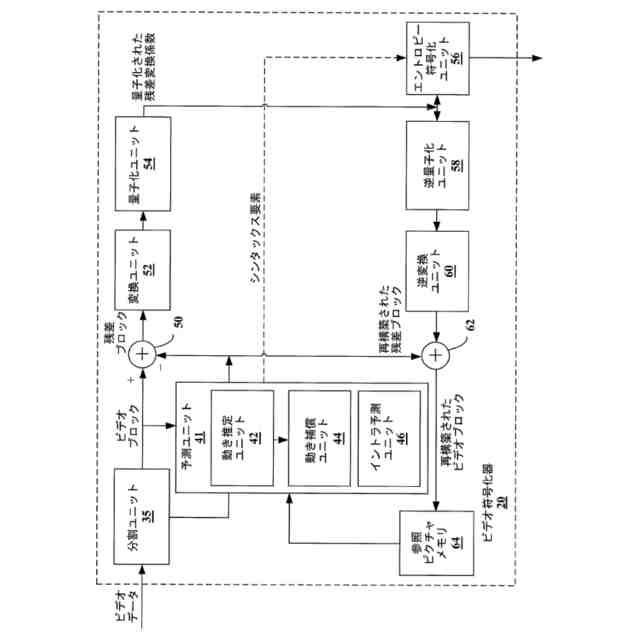
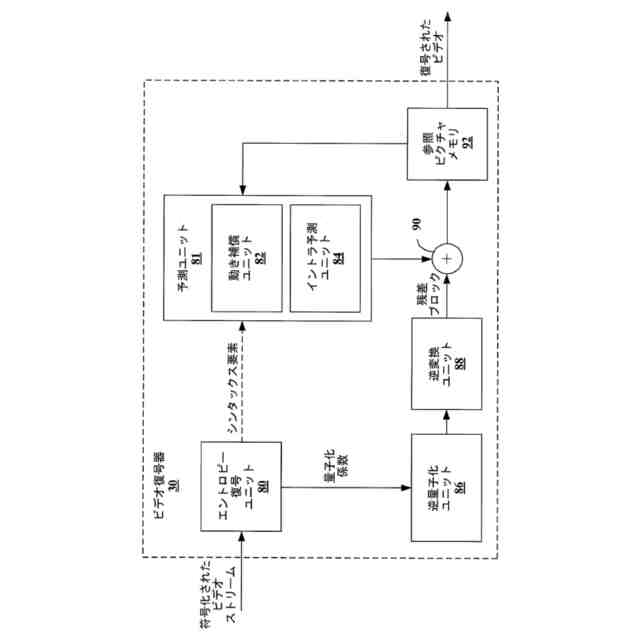
ビデオ圧縮技術では、ビデオシーケンスに固有の冗長情報が、空間(イントラ)予測および/または時間(インター)予測を実行することにより削減または除去され得る。ブロックベースのビデオ復号の場合、ビデオピクチャはビデオブロックに分割され得る。ビデオブロックは、ツリーブロック、符号化ユニット/復号ユニット(coding unit、CU)、または符号化ノード/復号ノードと呼ばれることもある。ピクチャのイントラ復号された(I)スライスにおけるビデオブロックは、同じピクチャの隣接するブロックにある参照サンプルの空間予測により符号化される。ピクチャのインター復号された(PまたはB)スライスにおけるビデオブロックは、同じピクチャの隣接するブロックにある参照サンプルの空間予測、または別の参照ピクチャにおける参照サンプルの時間予測により符号化され得る。ピクチャはフレームと呼ばれることがあり、参照ピクチャは参照フレームと呼ばれることがある。
【発明の概要】
【0004】
本出願の実施形態は、ビデオ符号化方法および関連するデバイスを提供し、動きベクトルの取得に主に関する。動き推定に関連する従来のインター予測技術およびイントラ予測技術では、動きベクトルが重要な実装要素であり、処理されるブロックを再構築するために、処理されるブロックの予測子を決定するために使用される。一般に、動きベクトルは、予測された動きベクトルと動きベクトルの差分とによって構成される。動きベクトルの差分は、動きベクトルと予測された動きベクトルとの間の差分である。いくつかの技術では、例えば動きベクトルマージモード(Mergeモード)では、動きベクトルの差分は使用されず、予測された動きベクトルが動きベクトルとして直接見なされる。予測された動きベクトルは、処理されるブロックと時間的または空間的な相関関係を有する以前の符号化または復号ブロックから通常取得され、処理されるブロックの動きベクトルは、後続の符号化ブロックまたは復号ブロックの予測された動きベクトルとして通常使用される。
【0005】
しかしながら、技術の発展に伴い、動きベクトルの更新に関連する技術が出現している。処理されるブロックの予測子を決定するための動きベクトルは、予測された動きベクトル、または予測された動きベクトルと動きベクトルの差分との和(ここでは、予測された動きベクトル、または予測された動きベクトルと動きベクトルの差分との和は、初期動きベクトルと呼ばれる)からもはや直接取得されないが、初期動きベクトルの更新された値から取得される。具体的には、処理されるブロックの初期動きベクトルが取得された後、初期動きベクトルが、実際の動きベクトルを取得するために最初に更新され、次に、処理されるブロックの予測ブロックが、実際の動きベクトルを使用することにより取得される。実際の動きベクトルは、後続の符号化ブロックまたは復号ブロックの予測手順で使用するために記憶される。動きベクトルの更新技術は、予測精度および符号化効率を改善する。しかしながら、後続の符号化ブロックまたは復号ブロックについては、1つまたは複数の以前の符号化ブロックまたは復号ブロックについての動きベクトルの更新が完了した後にのみ、換言すれば、実際の動きベクトルが決定された後にのみ、予測ステップが実行され得る。このことは、動きベクトルの更新が行われない方法と比較して、異なるブロックの並列処理またはパイプライン(pipe-line)処理に遅延を引き起こす。
【課題を解決するための手段】
【0006】
本出願の第1の態様によれば、動きベクトルを取得するための方法が提供され、処理されるブロックの参照ブロックを決定するステップであって、参照ブロックと処理されるブロックとが、事前設定された時間的または空間的な相関関係を有し、参照ブロックが、初期動きベクトルおよび1つまたは複数の事前設定された動きベクトルオフセットを有し、参照ブロックの初期動きベクトルが、参照ブロックの予測された動きベクトルに基づいて取得され、参照ブロックの予測ブロックが、初期動きベクトルおよび1つまたは複数の事前設定された動きベクトルオフセットに基づいて取得される、ステップと、参照ブロックの初期動きベクトルを、処理されるブロックの予測された動きベクトルとして使用するステップとを含む。
【0007】
上述のように、更新前の初期動きベクトルが、実際の動きベクトルを置き換えるために使用され、かつ後続の符号化ブロックまたは復号ブロックを予測するために使用される。実際の動きベクトルの更新が完了する前に、後続の符号化ブロックまたは復号ブロックに対して予測ステップが実行され得る。このことは、動きベクトルの更新によりもたらされる符号化効率の改善を確保し、処理の遅延を排除する。
【0008】
第1の態様の第1の実現可能な実装形態では、参照ブロックの初期動きベクトルは、以下の方式で、すなわち、参照ブロックの予測された動きベクトルを、参照ブロックの初期動きベクトルとして使用するステップ、または参照ブロックの初期動きベクトルを取得するために、参照ブロックの予測された動きベクトルと参照ブロックの動きベクトルの差分とを加算するステップで特に取得される。
【0009】
異なるインター予測モードでは、初期動きベクトルは、予測された動きベクトル、または予測された動きベクトルと動きベクトルの差分との和から取得され得る。このことは、符号化効率を改善する。
【0010】
第1の態様の第2の実現可能な実装形態では、参照ブロックの予測ブロックは、以下の方式で、すなわち、参照ブロックの参照フレームから、参照ブロックの初期動きベクトルによって示されるピクチャブロックを取得し、取得されたピクチャブロックを、参照ブロックの一時的な予測ブロックとして使用するステップと、1つまたは複数の実際の動きベクトルを取得するために、参照ブロックの初期動きベクトルと1つまたは複数の事前設定された動きベクトルオフセットとを加算するステップであって、各実際の動きベクトルが探索位置を示す、ステップと、1つまたは複数の実際の動きベクトルによって示される探索位置において1つまたは複数の候補予測ブロックを取得するステップであって、各探索位置が1つの候補予測ブロックに対応する、ステップと、1つまたは複数の候補予測ブロックから、一時的な予測ブロックとのピクセル差分が最小である候補予測ブロックを、参照ブロックの予測ブロックとして選択するステップで特に取得される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
音響装置
1か月前
個人
携帯端末保持具
1か月前
日本精機株式会社
投影システム
1か月前
日本無線株式会社
音声通信方式
1か月前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
通信装置
1か月前
日本精機株式会社
車両用表示装置
1か月前
個人
補聴器のイヤピース耳穴挿入具
1か月前
ヤマハ株式会社
信号処理装置
11日前
キヤノン電子株式会社
画像読取装置
1か月前
日本精機株式会社
画像投映システム
今日
ヤマハ株式会社
音響出力装置
2か月前
電気興業株式会社
無線中継器
18日前
ヤマハ株式会社
音響出力装置
2か月前
キヤノン電子株式会社
画像読取装置
1か月前
キヤノン株式会社
映像表示装置
2か月前
株式会社シグマ
撮像素子及び撮像装置
1か月前
キヤノン株式会社
画像処理装置
1か月前
オムロン株式会社
スレーブ装置
2か月前
キヤノン株式会社
画像表示装置
1か月前
株式会社ヴィーネックス
カメラ
1か月前
リオン株式会社
電気機械変換器
1か月前
日本放送協会
映像伝送システム
1か月前
キヤノン株式会社
撮影システム
1か月前
キヤノン株式会社
画像処理装置
1か月前
キヤノン株式会社
通信システム
26日前
シャープ株式会社
表示装置
1か月前
シャープ株式会社
電子機器
1か月前
キヤノン電子株式会社
画像読取システム
27日前
エルメック株式会社
信号伝送回路
28日前
株式会社クーネル
音響装置
1か月前
個人
外部ヘッダ変換通信装置および通信網
11日前
アイホン株式会社
インターホン機器
2か月前
テックス通信株式会社
電話システム
今日
株式会社国際電気
無線通信システム
1か月前
株式会社バッファロー
無線通信装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ