TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025109469
公報種別
公開特許公報(A)
公開日
2025-07-25
出願番号
2024003379
出願日
2024-01-12
発明の名称
溶接器具の冷却システムおよびロボットシステム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B23K
11/36 20060101AFI20250717BHJP(工作機械;他に分類されない金属加工)
要約
【課題】システム構成の複雑化を抑制しながら、溶接器具の冷却を適切に行うことが可能な溶接器具の冷却システムを提供する。
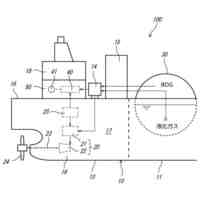
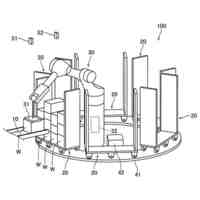
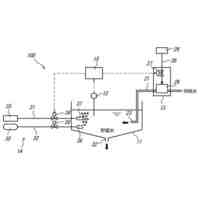
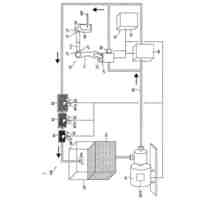
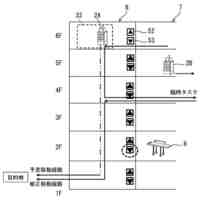
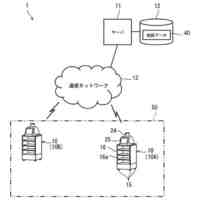
【解決手段】この溶接器具20の冷却システム100は、駆動部MT2を含み、ロボット10を用いた溶接工程に用いられる溶接器具20に冷却媒体CLを流入させるポンプ51と、溶接器具20から流出した冷却媒体CLを冷却する放熱器52と、駆動部MT3を含み、放熱器52を冷却する送風ファン53と、溶接器具20から流出した冷却媒体CLの温度を検出する温度検出部56と、温度検出部56により検出された冷却媒体CLの温度に基づいて、駆動部MT2および駆動部MT3の少なくとも一方を、ロボット10の外部軸として制御するロボットコントローラ12と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
第1駆動部を含み、ロボットを用いた溶接工程に用いられる溶接器具に冷却媒体を流入させるポンプと、
前記溶接器具から流出した前記冷却媒体を冷却する放熱器と、
第2駆動部を含み、前記放熱器を冷却する放熱器冷却部と、
前記溶接器具から流出した前記冷却媒体の温度を検出する温度検出部と、
前記温度検出部により検出された前記冷却媒体の温度に基づいて、前記第1駆動部および前記第2駆動部の少なくとも一方を、前記ロボットの外部軸として制御するロボットコントローラと、を備える、溶接器具の冷却システム。
続きを表示(約 950 文字)
【請求項2】
前記ロボットコントローラは、前記温度検出部により検出された前記冷却媒体の温度が所定のしきい値を超える場合、前記溶接器具の冷却量が増加するように、前記第1駆動部および前記第2駆動部の少なくとも一方を制御する、請求項1に記載の溶接器具の冷却システム。
【請求項3】
前記所定のしきい値は、段階的に設けられた複数のしきい値を含み、
前記ロボットコントローラは、前記複数のしきい値に応じて、前記溶接器具の冷却量が段階的に増加するように、前記第1駆動部および前記第2駆動部の少なくとも一方を制御する、請求項2に記載の溶接器具の冷却システム。
【請求項4】
前記第1駆動部は、モータであり、
前記ロボットコントローラは、前記温度検出部により検出された前記冷却媒体の温度に基づいて、前記第1駆動部としての前記モータの回転数を制御する、請求項1に記載の溶接器具の冷却システム。
【請求項5】
前記第2駆動部は、モータであり、
前記ロボットコントローラは、前記温度検出部により検出された前記冷却媒体の温度に基づいて、前記第2駆動部としての前記モータのオンオフを切り替える、請求項1に記載の溶接器具の冷却システム。
【請求項6】
前記放熱器冷却部は、前記放熱器に風を送る送風ファン、前記放熱器に冷却用の霧を噴霧する噴霧部、または、前記放熱器に冷却した風を送るクーラーのいずれかである、請求項1に記載の溶接器具の冷却システム。
【請求項7】
ロボットと、
第1駆動部を含み、前記ロボットを用いた溶接工程に用いられる溶接器具に冷却媒体を流入させるポンプと、
前記溶接器具から流出した前記冷却媒体を冷却する放熱器と、
第2駆動部を含み、前記放熱器を冷却する放熱器冷却部と、
前記溶接器具から流出した前記冷却媒体の温度を検出する温度検出部と、
前記温度検出部により検出した前記冷却媒体の温度に基づいて、前記第1駆動部および前記第2駆動部の少なくとも一方を、前記ロボットの外部軸として制御するロボットコントローラと、
を含む冷却装置と、を備える、ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
この開示は、溶接器具の冷却システムおよびロボットシステムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、溶接器具の冷却システムが知られている。特許文献1には、溶接器具としての溶接トーチを冷却するための冷却水を循環させる冷却システムとしての冷却水循環装置が開示されている。冷却水循環装置は、冷却水を放熱させるラジエータと、冷却水を循環させる循環ポンプと、ラジエータに送風する送風機と、冷却水の温度を検出する水温センサと、水温センサにより検出された冷却水の温度に基づいて送風機の駆動を制御する制御回路とを備えている。
【先行技術文献】
【特許文献】
【0003】
特開2014-108438号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に記載された冷却水循環装置では、水温センサにより検出された冷却水の温度に基づいて送風機の駆動を制御するため、溶接トーチの冷却量を適切に制御することが可能である一方、冷却水循環装置の制御回路が、水温センサにより検出された冷却水の温度に基づいて送風機の駆動を制御する。この場合、送風機の駆動を制御するために専用の冷却水循環装置の制御回路が必要であるため、システム構成が複雑化する。このため、システム構成の複雑化を抑制しながら、溶接トーチの冷却を適切に行うことが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、システム構成の複雑化を抑制しながら、溶接器具の冷却を適切に行うことが可能な溶接器具の冷却システムおよびロボットシステムを提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面による溶接器具の冷却システムは、第1駆動部を含み、ロボットを用いた溶接工程に用いられる溶接器具に冷却媒体を流入させるポンプと、溶接器具から流出した冷却媒体を冷却する放熱器と、第2駆動部を含み、放熱器を冷却する放熱器冷却部と、溶接器具から流出した冷却媒体の温度を検出する温度検出部と、温度検出部により検出された冷却媒体の温度に基づいて、第1駆動部および第2駆動部の少なくとも一方を、ロボットの外部軸として制御するロボットコントローラと、を備える。
【0007】
この開示の第1の局面による溶接器具の冷却システムでは、上記のように、温度検出部により検出された冷却媒体の温度に基づいて、第1駆動部および第2駆動部の少なくとも一方を、ロボットの外部軸として制御するロボットコントローラを設ける。これにより、既存のロボットコントローラを有効に利用して、第1駆動部を含むポンプおよび第2駆動部を含む放熱器冷却部の少なくとも一方の動作を制御することができる。その結果、ロボットコントローラとは別個に独立して、ポンプおよび放熱器冷却部の少なくとも一方の動作を制御するための専用の制御回路を設ける必要がない。これにより、システム構成の複雑化を抑制することができる。また、温度検出部により検出された冷却媒体の温度に基づいて、第1駆動部および第2駆動部の少なくとも一方を制御することにより、溶接器具の冷却を適切に行うことができる。これらの結果、システム構成の複雑化を抑制しながら、溶接器具の冷却を適切に行うことができる。
【0008】
この開示の第2の局面によるロボットシステムは、ロボットと、第1駆動部を含み、ロボットを用いた溶接工程に用いられる溶接器具に冷却媒体を流入させるポンプと、溶接器具から流出した冷却媒体を冷却する放熱器と、第2駆動部を含み、放熱器を冷却する放熱器冷却部と、溶接器具から流出した冷却媒体の温度を検出する温度検出部と、温度検出部により検出した冷却媒体の温度に基づいて、第1駆動部および第2駆動部の少なくとも一方を、ロボットの外部軸として制御するロボットコントローラと、を含む冷却装置と、を備える。
【0009】
この開示の第2の局面によるロボットシステムでは、上記のように、温度検出部により検出した冷却媒体の温度に基づいて、第1駆動部および第2駆動部の少なくとも一方を、ロボットの外部軸として制御するロボットコントローラを設ける。これにより、既存のロボットコントローラを有効に利用して、第1駆動部を含むポンプおよび第2駆動部を含む放熱器冷却部の少なくとも一方の動作を制御することができる。その結果、ロボットコントローラとは別個に独立して、ポンプおよび放熱器冷却部の少なくとも一方の動作を制御するための専用の制御回路を設ける必要がない。これにより、システム構成の複雑化を抑制することができる。また、温度検出部により検出された冷却媒体の温度に基づいて、第1駆動部および第2駆動部の少なくとも一方を制御することにより、溶接器具の冷却を適切に行うことができる。これらの結果、システム構成の複雑化を抑制しながら、溶接器具の冷却を適切に行うことが可能なロボットシステムを提供することができる。
【発明の効果】
【0010】
本開示によれば、システム構成の複雑化を抑制しながら、溶接器具の冷却を適切に行うことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
作業設備
3日前
川崎重工業株式会社
ロボット
25日前
川崎重工業株式会社
養殖設備
1か月前
川崎重工業株式会社
燃料供給設備
24日前
川崎重工業株式会社
搬送システム
3日前
川崎重工業株式会社
液化ガス運搬船
24日前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
パイプシューガイド
1か月前
川崎重工業株式会社
GHG排出量推定装置
25日前
川崎重工業株式会社
低温流体移送用二重配管
1か月前
川崎重工業株式会社
二酸化炭素分離システム
2日前
川崎重工業株式会社
プロペラダクトの支持構造
1か月前
川崎重工業株式会社
二重管の製造方法および二重管
1か月前
川崎重工業株式会社
パレット及びロボットシステム
3日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
2日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
2日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
2日前
川崎重工業株式会社
浸炭製品の硬さ予測装置及び方法
2日前
川崎重工業株式会社
養殖設備及び溶存酸素濃度調整方法
1か月前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
1か月前
川崎重工業株式会社
溶接器具の冷却システムおよびロボットシステム
9日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
24日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
24日前
川崎重工業株式会社
ロボットシステムおよびロボットシステムの制御方法
1か月前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
5日前
川崎重工業株式会社
情報処理装置
17日前
川崎重工業株式会社
操船支援システム、操船支援方法、及び、操船支援プログラム
1か月前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
25日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
25日前
川崎重工業株式会社
経路計画装置、運転支援システム、経路計画方法及び経路計画プログラム
5日前
川崎重工業株式会社
ロボットシステム及びその制御方法
1か月前
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び制御プログラム
1か月前
川崎重工業株式会社
基板搬送ロボット、異常検出方法、および、プログラム
17日前
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び自律ロボットの制御プログラム
1か月前
個人
タップ
2か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ