TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112207
公報種別
公開特許公報(A)
公開日
2025-07-31
出願番号
2024006367
出願日
2024-01-18
発明の名称
搬送システム
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B23P
19/00 20060101AFI20250724BHJP(工作機械;他に分類されない金属加工)
要約
【課題】搬送システムを小型化する。
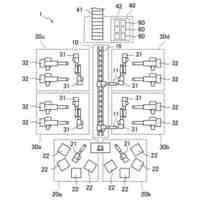
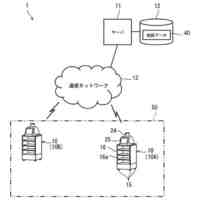
【解決手段】搬送システム1は、ワークピースWが保管された保管エリア20と、ワークピースWに対して作業を行う複数の作業エリア30とを含む作業設備2に配置され、ワークピースWを支持するアーム13を有し、ワークピースWを搬送する搬送ロボット11と、周囲に保管エリア20及び複数の作業エリア30が配置され、搬送ロボット11が走行する走行路16と、保管エリア20からワークピースWを受け取って、走行路16を利用して、ワークピースWを作業エリア30に搬送するとともに、複数の作業エリア30間でワークピースWを搬送するよう搬送ロボット11を制御する搬送ロボットコントローラ71と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
ワークピースが保管された保管エリアと、前記ワークピースに対して作業を行う複数の作業エリアとを含む作業設備に配置され、前記ワークピースを支持するアームを有し、前記ワークピースを搬送する搬送ロボットと、
周囲に前記保管エリア及び複数の前記作業エリアが配置され、前記搬送ロボットが走行する走行路と、
前記保管エリアから前記ワークピースを受け取って、前記走行路を利用して、前記ワークピースを前記作業エリアに搬送するとともに、複数の前記作業エリア間で前記ワークピースを搬送するよう前記搬送ロボットを制御するロボットコントローラと、を備える搬送システム。
続きを表示(約 620 文字)
【請求項2】
請求項1に記載の搬送システムにおいて、
前記作業設備は、前記作業エリアでの作業が完了した前記ワークピースを搬出する搬出エリアを含み、
前記ロボットコントローラは、前記走行路を利用して、前記搬出エリアに前記ワークピースを搬送するよう前記搬送ロボットを制御する搬送システム。
【請求項3】
請求項2に記載の搬送システムにおいて、
前記ワークピースが配置されるパレットを更に備え、
前記保管エリアは、前記パレットに前記ワークピースを配膳するエリアであり、
前記ロボットコントローラは、前記アームにより前記パレットを支持して、前記パレットごと前記ワークピースを搬送するとともに、空の前記パレットを前記保管エリアに搬送するよう前記搬送ロボットを制御する搬送システム。
【請求項4】
請求項3に記載の搬送システムにおいて、
空の前記パレットは、前記搬出エリアに保管されており、
前記ロボットコントローラは、前記搬出エリアから前記保管エリアに空の前記パレットを搬送するよう前記搬送ロボットを制御する搬送システム。
【請求項5】
請求項1~4のいずれか1つに記載の搬送システムにおいて、
少なくとも2つの前記作業エリアは、前記ワークピースを搬送する機構を介することなく、前記走行路に沿って隣接配置されている搬送システム。
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、搬送システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1は、従来の搬送システムを開示する。従来の搬送システムは、第1ロボット群と、第2ロボット群と、第3ロボット群とを備える。第1ロボット群、第2ロボット群、及び第3ロボット群は、作業ラインに沿って並設されている。第1ロボット群は現工程のエリアに配置され、第2ロボット群は次工程のエリアに配置され、第3ロボット群は第1ロボット群と第2ロボット群との間に配置される。従来の搬送システムは、第1ロボット群、第2ロボット群、及び第3ロボット群の間で被搬送物の引き渡し及び受け取りを行うことで、被搬送物を搬送する。
【先行技術文献】
【特許文献】
【0003】
特許第3948327号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のような搬送システムでは、エリアの間に搬送用のロボットが必要である。エリアの数が多くなれば、搬送用ロボットの数も増加する。エリアの数が増える度に、搬送システムが大型化されてしまうため、搬送システムの小型化の観点からは改良の余地がある。
【課題を解決するための手段】
【0005】
ここに開示する技術は、搬送システムに関する。搬送システムは、
ワークピースが保管された保管エリアと、前記ワークピースに対して作業を行う複数の作業エリアとを含む作業設備に配置され、前記ワークピースを支持するアームを有し、前記ワークピースを搬送する搬送ロボットと、
周囲に前記保管エリア及び複数の前記作業エリアが配置され、前記搬送ロボットが走行する走行路と、
前記保管エリアから前記ワークピースを受け取って、前記走行路を利用して、前記ワークピースを前記作業エリアに搬送するとともに、複数の前記作業エリア間で前記ワークピースを搬送するよう前記搬送ロボットを制御するロボットコントローラと、を備える。
【発明の効果】
【0006】
前述の搬送システムは、ワークピースの、保管エリアからの作業エリアへの移動及び作業エリア間での移動を共通の搬送ロボットにより行うことができ、搬送ロボットの数を少なくすることができるため、システムを小型化することができる。
【図面の簡単な説明】
【0007】
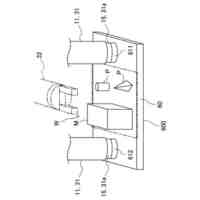
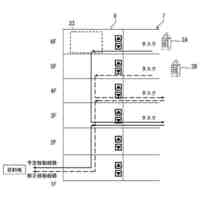
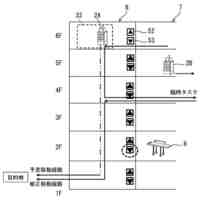
図1は、実施形態に係る搬送システムが採用された作業設備の平面図である。
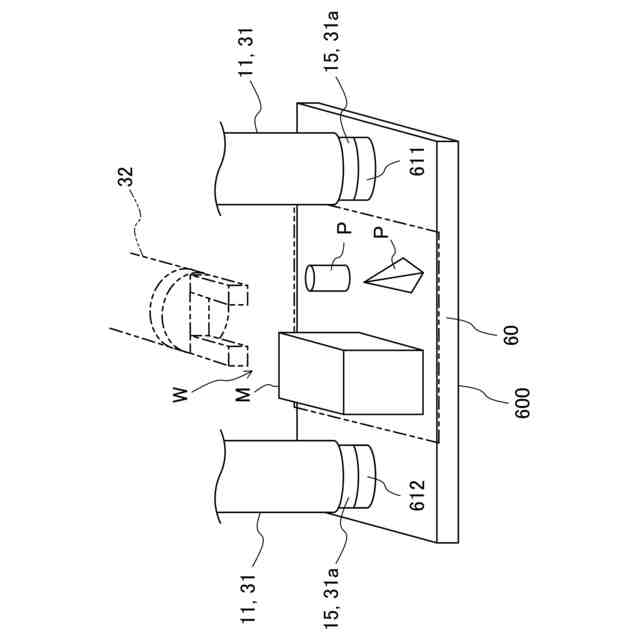
図2は、作業設備を保管エリア側から見た図である。
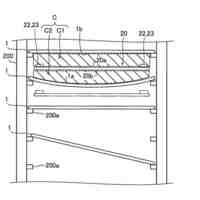
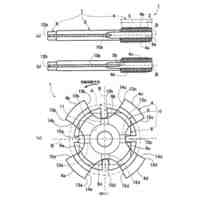
図3は、搬送に用いられるパレットの一例を示す平面図である。
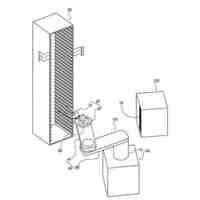
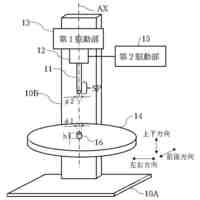
図4は、搬送ロボットと保持ロボットとの間でパレットを渡す動作を示す概略図である。
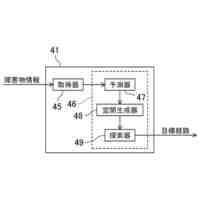
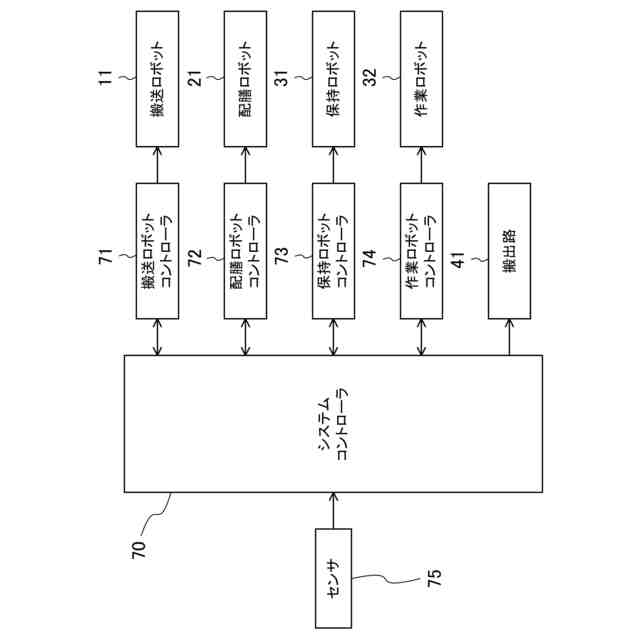
図5は、搬送システムの制御系を示すブロック図である。
図6は、ワークピース及びパレットの受け取り先及び引き渡し先を示す概略図である。
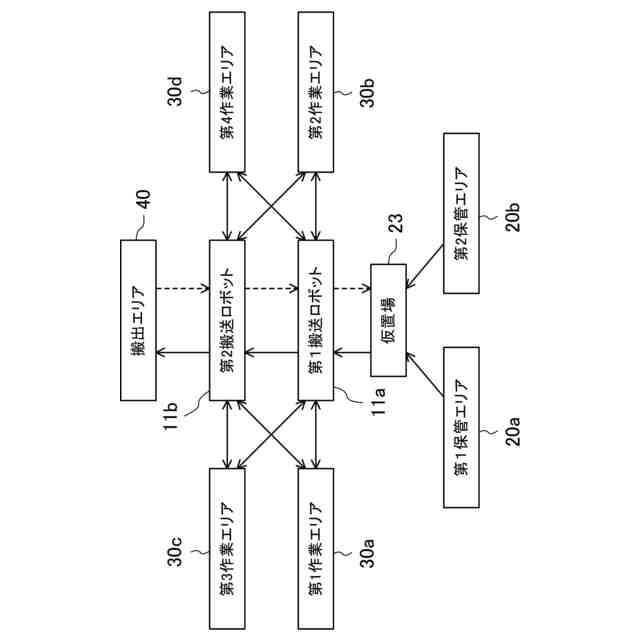
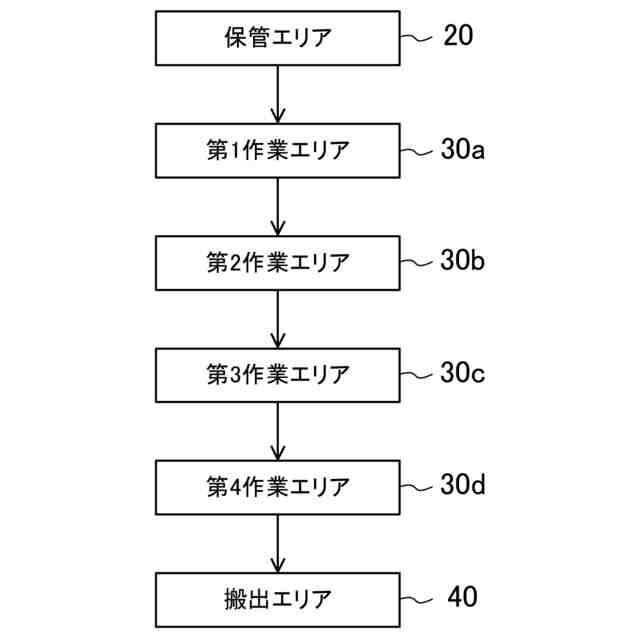
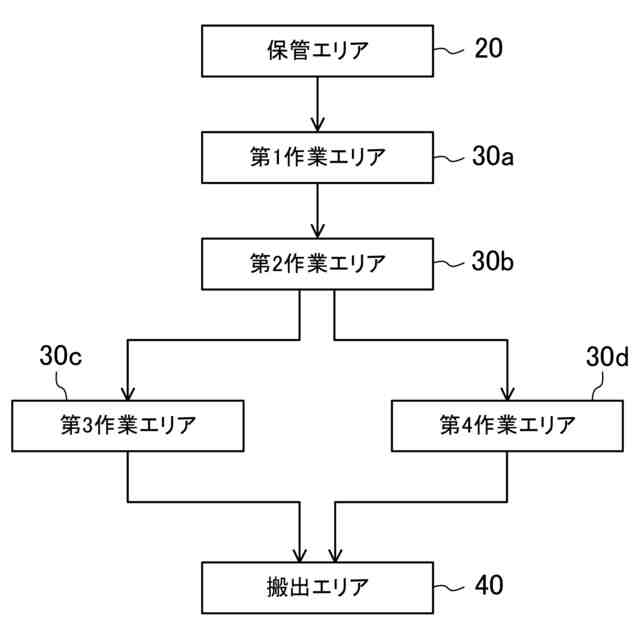
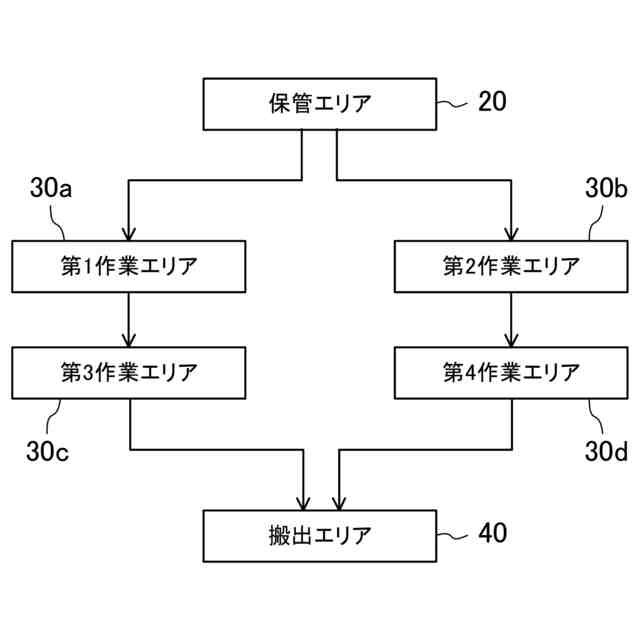
図7は、工程数が4つである場合のワークピースの搬送ルートを示す概略図である。
図8は、工程数が3つである場合のワークピースの搬送ルートを示す概略図である。
図9は、工程数が2つである場合のワークピースの搬送ルートを示す概略図である。
図10は、工程数が1つである場合のワークピースの搬送ルートを示す概略図である。
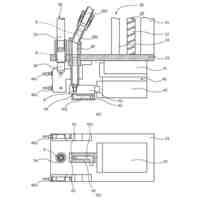
図11は、搬送システムの変形例1を示す平面図である。
図12は、搬送システムの変形例2を示す平面図である。
【発明を実施するための形態】
【0008】
以下、搬送システムの実施形態について、図面を参照しながら説明する。ここで説明する監視システムは例示である。
【0009】
〔作業設備の全体構造〕
図1は、搬送システム1が採用された作業設備2の各エリアの配置を示す概略斜視図である。作業設備2は、例えば、ワークピースWの組み立て作業やワークピースWに対する溶接作業を行う設備である。ワークピースWは、例えば、エンジンなどのデバイス、ボデーなどの車体を構成するパーツ、計算機などを含む。
【0010】
作業設備2における、前、後、右、及び左は、図1に示す矢印のように定義する。作業設備2の前は図1の紙面上側であり、作業設備2の後は図1の紙面下側である。作業設備2の右は図1の紙面右側であり、作業設備2の左は図1の紙面左側である。作業設備2における、上及び下は、図2に示す矢印のように定義する。作業設備2の右は図2の紙面上側であり、作業設備2の左は図1の紙面下側である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ロボット
29日前
川崎重工業株式会社
作業設備
7日前
川崎重工業株式会社
搬送システム
7日前
川崎重工業株式会社
燃料供給設備
28日前
川崎重工業株式会社
液化ガス運搬船
28日前
川崎重工業株式会社
GHG排出量推定装置
29日前
川崎重工業株式会社
二酸化炭素分離システム
6日前
川崎重工業株式会社
プロペラダクトの支持構造
1か月前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
6日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
6日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
6日前
川崎重工業株式会社
パレット及びロボットシステム
7日前
川崎重工業株式会社
浸炭製品の硬さ予測装置及び方法
6日前
川崎重工業株式会社
溶接器具の冷却システムおよびロボットシステム
13日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
28日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
28日前
川崎重工業株式会社
ロボットシステムおよびロボットシステムの制御方法
1か月前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
9日前
川崎重工業株式会社
情報処理装置
21日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
29日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
29日前
川崎重工業株式会社
経路計画装置、運転支援システム、経路計画方法及び経路計画プログラム
9日前
川崎重工業株式会社
ワーク搬送ロボットの干渉確認方法およびワーク搬送ロボットの干渉確認装置
1日前
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び制御プログラム
1か月前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
今日
川崎重工業株式会社
基板搬送ロボット、異常検出方法、および、プログラム
21日前
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び自律ロボットの制御プログラム
1か月前
個人
タップ
3か月前
個人
加工機
2か月前
麗豊実業股フン有限公司
ラクトバチルス・パラカセイNB23菌株及びそれを筋肉量の増加や抗メタボリック症候群に用いる用途
2か月前
日東精工株式会社
ねじ締め機
2か月前
株式会社不二越
ドリル
2か月前
株式会社北川鉄工所
回転装置
1か月前
株式会社不二越
ドリル
3か月前
日東精工株式会社
ねじ締め機
3か月前
株式会社ダイヘン
溶接電源装置
今日
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ