TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025095467
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211487
出願日
2023-12-14
発明の名称
ロボットシステム
出願人
川崎重工業株式会社
代理人
個人
主分類
B65G
47/90 20060101AFI20250619BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】物体を仕分けるための全体的な作業時間を短縮することが可能なロボットシステムを提供する。
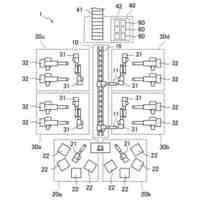
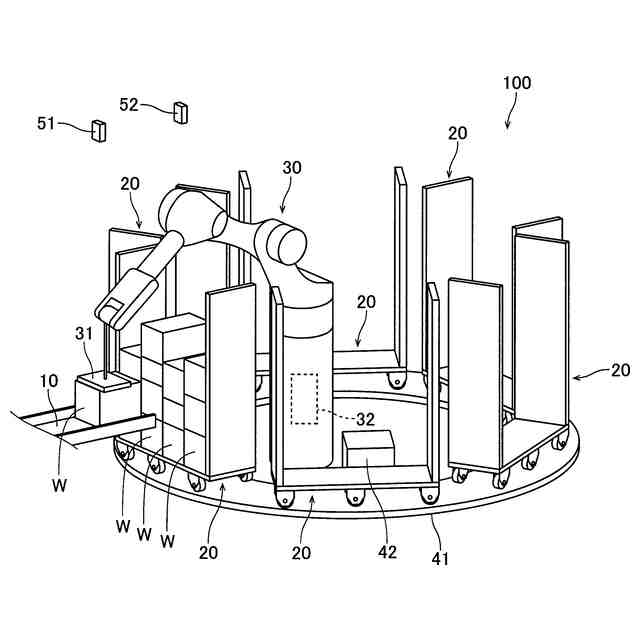
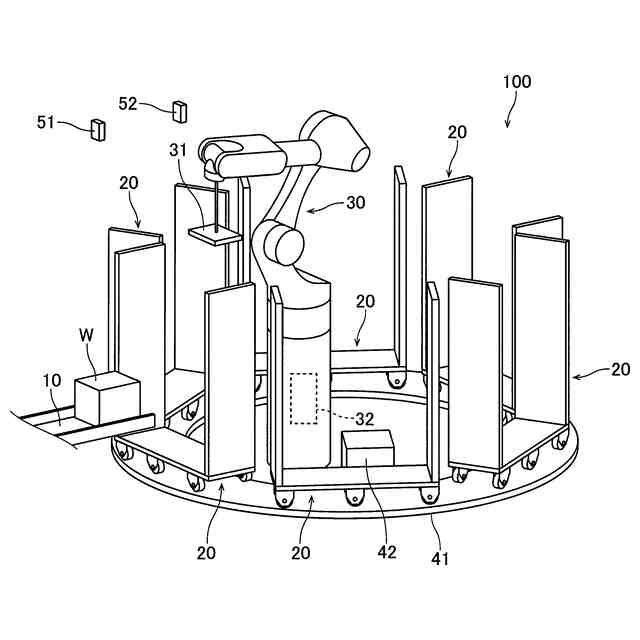
【解決手段】このロボットシステム100は、物体Wを搬送するコンベア10と、特定の状態に配置され、物体Wが積載収容される複数の台車20と、物体Wをコンベア10から特定の状態に配置された複数の台車20のうちのいずれかに積載するロボット30と、を備える。
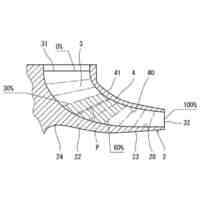
【選択図】図3
特許請求の範囲
【請求項1】
物体を搬送するコンベアと、
特定の状態に配置され、前記物体が積載収容される複数の台車と、
前記物体を前記コンベアから前記特定の状態に配置された複数の台車のうちのいずれかに積載するロボットと、を備える、ロボットシステム。
続きを表示(約 740 文字)
【請求項2】
前記複数の台車は、弧状に配置されており、
前記ロボットは、前記物体を前記コンベアから前記弧状に配置された複数の台車のうちのいずれかに積載する、請求項1に記載のロボットシステム。
【請求項3】
前記複数の台車は、円弧状に配置されており、
前記ロボットは、前記物体を前記コンベアから前記円弧状に配置された複数の台車のうちのいずれかに積載する、請求項2に記載のロボットシステム。
【請求項4】
前記複数の台車は、前記ロボットを取り囲むように円状に配置されており、
前記ロボットは、前記物体を前記コンベアから前記ロボットを取り囲むように円状に配置された複数の台車のうちのいずれかに積載する、請求項3に記載のロボットシステム。
【請求項5】
前記ロボットを取り囲むように円状に配置された複数の台車を載置する円状の台車載置部と、
前記円孤状に配置された台車載置部を回動させる回動アクチュエータと、を備える、請求項4に記載のロボットシステム。
【請求項6】
前記ロボットは、
前記物体を保持するハンドと、
前記物体を把持して前記コンベアから前記特定の状態に配置された複数の台車のうちのいずれかに積載するように前記ハンドを制御する制御部と、を含む、請求項1に記載のロボットシステム。
【請求項7】
前記ロボットは、
前記台車を保持するハンドと、
前記物体が前記コンベアから前記特定の状態に配置された複数の台車のうちのいずれかに積載されるように前記台車を保持する前記ハンドを制御する制御部と、を含む、請求項1に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
この開示は、物体をコンベアから台車に積載するロボットを備えるロボットシステムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、ワークをコンベアからパレットに積載するロボットを備えるロボット制御装置が知られている。たとえば、特許文献1には、コンベアにより送られてきたワークを、ロボットのハンドにより把持して、パレットの真上に搬送することにより、ワークをパレットに積み上げるロボット制御装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平4-75886号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載されているロボット制御装置では、コンベアにより送られてきたワークを、ロボットのハンドにより把持して、パレットの真上に搬送することにより、ワークをパレットに積み上げるので、同一のパレットに仕向け地が互いに異なるワークを積載する必要がある。この場合、同一のパレットに仕向け地が互いに異なるワークを積載する工程の後に、同一のパレットに積載された仕向け地が互いに異なるワークを仕向け地毎に人手で仕分ける作業が必要となるので、ワークを仕分けるための全体的な作業時間が比較的長くなる。このため、物体としてのワークを仕分けるための全体的な作業時間を短縮することが可能な構成が望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、物体を仕分けるための全体的な作業時間を短縮することが可能なロボットシステムを提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために、この開示の一の局面によるロボットシステムは、物体を搬送するコンベアと、特定の状態に配置され、物体が積載収容される複数の台車と、物体をコンベアから特定の状態に配置された複数の台車のうちのいずれかに積載するロボットと、を備える。
【0007】
この開示の一の局面によるロボットシステムは、上記のように、物体をコンベアから特定の状態に配置された複数の台車のうちのいずれかに積載するロボットを備える。これにより、物体をコンベアから特定の状態に配置された複数の台車に仕向け地毎に直接積載させることができる。この場合、同一の台車に仕向け地が互いに異なる物体を積載する工程の後に、同一の台車に積載された仕向け地が互いに異なる物体を仕向け地毎に仕分ける作業が必要な場合と比較して、物体を仕分けるための全体的な作業時間が比較的短くなる。その結果、物体を仕分けるための全体的な作業時間を短縮することができる。
【発明の効果】
【0008】
本開示によれば、上記のように、物体を仕分けるための全体的な作業時間を短縮することが可能なロボットシステムを提供することができる。
【図面の簡単な説明】
【0009】
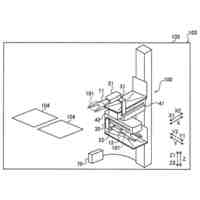
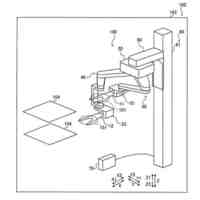
本開示の第1実施形態によるロボットシステムを示した斜視図である。
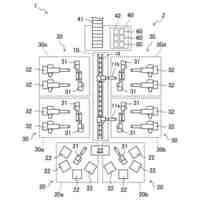
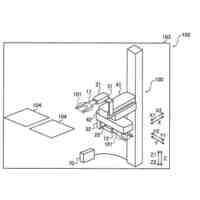
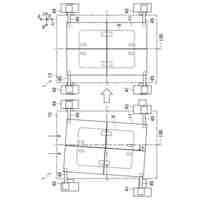
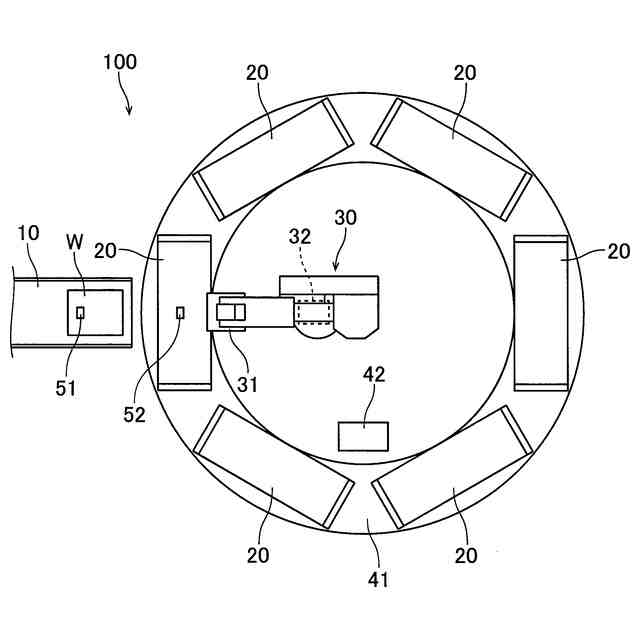
本開示の第1実施形態によるロボットシステムを示した平面図である。
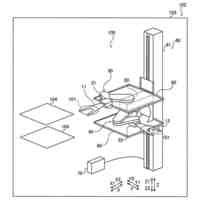
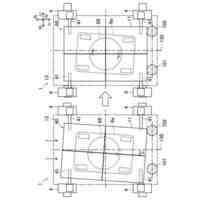
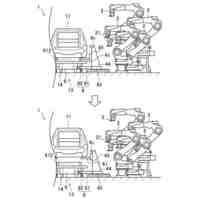
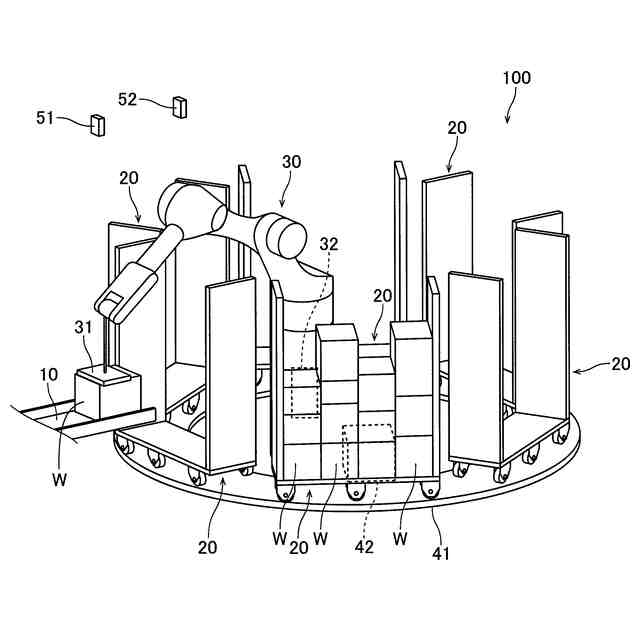
本開示の第1実施形態によるロボットシステムにおいて複数の台車のうちの1つに物体を積載収容した状態を示した斜視図である。
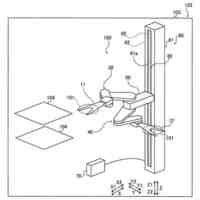
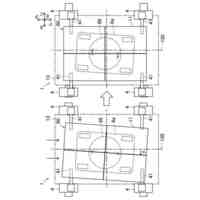
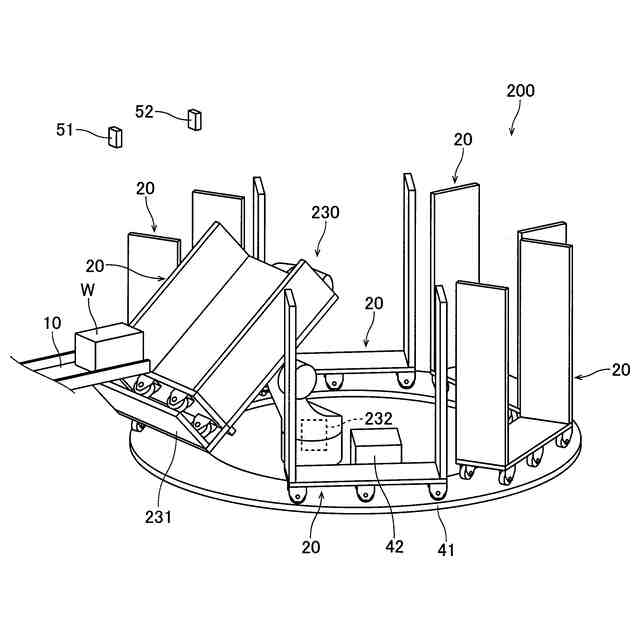
図3の状態から複数の台車が載置された台車載置部を回動アクチュエータにより回動させた状態を示した斜視図である。
本開示の第2実施形態によるロボットシステムを示した斜視図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した実施形態を図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
表面材
14日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
作業設備
1か月前
川崎重工業株式会社
水素遮蔽膜
1か月前
川崎重工業株式会社
燃料供給設備
2か月前
川崎重工業株式会社
搬送システム
1か月前
川崎重工業株式会社
排ガス採取器
18日前
川崎重工業株式会社
液化ガス運搬船
2か月前
川崎重工業株式会社
基板搬送ロボット
6日前
川崎重工業株式会社
廃棄物投入ホッパ
1か月前
川崎重工業株式会社
基板搬送ロボット
6日前
川崎重工業株式会社
基板搬送ロボット
6日前
川崎重工業株式会社
基板搬送ロボット
6日前
川崎重工業株式会社
ロボットシステム
6日前
川崎重工業株式会社
ロボットシステム
6日前
川崎重工業株式会社
位置情報システム
6日前
川崎重工業株式会社
基板搬送ロボット
6日前
川崎重工業株式会社
ロボットシステム
6日前
川崎重工業株式会社
クローズドインペラ
6日前
川崎重工業株式会社
正極活物質の再生方法
7日前
川崎重工業株式会社
液化ガス導入システム
14日前
川崎重工業株式会社
GHG排出量推定装置
2か月前
川崎重工業株式会社
二酸化炭素分離システム
1か月前
川崎重工業株式会社
電池セル及びその分解方法
28日前
川崎重工業株式会社
プロペラダクトの支持構造
2か月前
川崎重工業株式会社
換気システム及びシェルター
1か月前
川崎重工業株式会社
パレット及びロボットシステム
1か月前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
1か月前
川崎重工業株式会社
ロボットシステム及びロボット
6日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
1か月前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
1か月前
川崎重工業株式会社
浸炭製品の硬さ予測装置及び方法
1か月前
川崎重工業株式会社
電力供給システムおよびその制御方法
13日前
川崎重工業株式会社
白金族金属の可溶化方法及び金属の分離方法
13日前
川崎重工業株式会社
歯車装置の支持構造の診断装置及び診断方法
5日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ