TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107435
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2025080520,2022073795
出願日
2025-05-13,2022-04-27
発明の名称
基板搬送ロボット、異常検出方法、および、プログラム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20250710BHJP(基本的電気素子)
要約
【課題】基板に対する搬送、処理、および、収納の少なくとも1つを行う半導体製造装置の異常を検出可能な半導体製造装置システムを提供する。
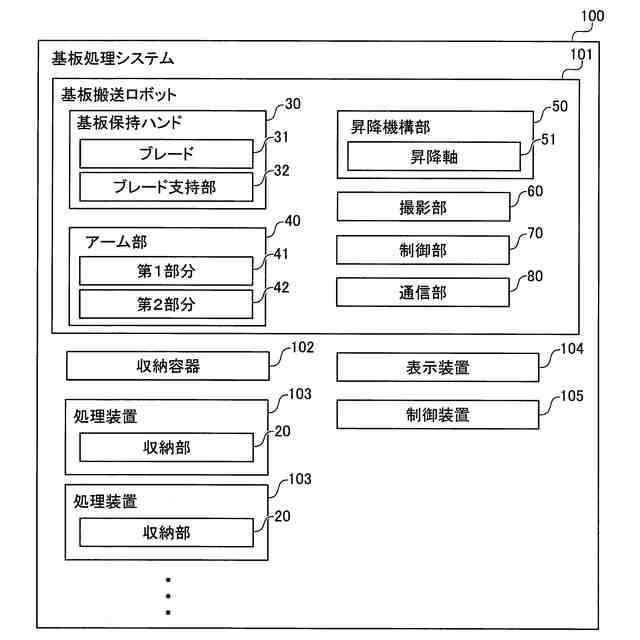
【解決手段】この基板処理システム100(半導体製造装置システム)は、基板10を保持する基板保持ハンド30と、基板10に対する搬送、処理、および、収納の少なくとも1つを行う処理装置103の異常を検出するために少なくとも処理装置103の構成要素を撮影する撮影部60と、撮影部60により撮影された撮影画像に基づいて処理装置103の構成要素の異常を検出する制御部と、を備える。
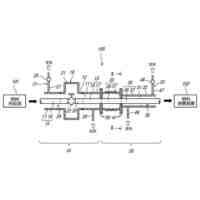
【選択図】図2
特許請求の範囲
【請求項1】
基板を保持する基板保持ハンドと、
前記基板に対する搬送、処理、および、収納の少なくとも1つを行う半導体製造装置の異常を検出するために少なくとも前記半導体製造装置の構成要素を撮影する撮影部と、
前記基板保持ハンドを移動させることによって、前記半導体製造装置に対して前記基板保持ハンドに保持された前記基板を搬送する基板搬送ロボットと、
前記撮影部により撮影された撮影画像に基づいて、前記基板搬送ロボットにより前記基板が搬送される前記半導体製造装置の構成要素の異常を検出する制御部と、を備え、
前記制御部は、前記撮影部による前記撮影画像に基づいて、少なくとも前記半導体製造装置の構成要素における形状変化を含む異常を検出する、半導体製造装置システム。
続きを表示(約 1,100 文字)
【請求項2】
前記基板保持ハンドは、前記基板が載置されるブレードと、前記ブレードを支持するブレード支持部とを含み、
前記撮影部は、前記ブレード支持部に配置されている、請求項1に記載の半導体製造装置システム。
【請求項3】
基板を保持する基板保持ハンドと、
前記基板に対する搬送、処理、および、収納の少なくとも1つを行う半導体製造装置の異常を検出するために少なくとも前記半導体製造装置の構成要素を撮影する撮影部と、
前記撮影部により撮影された撮影画像に基づいて前記半導体製造装置の構成要素の異常を検出する制御部と、を備え、
前記制御部は、前記撮影部による前記撮影画像に基づいて、前記半導体製造装置の構成要素における形状変化と、前記半導体製造装置の構成要素が欠損した異物の検知との少なくとも一つを含む異常を検出し、
前記撮影部は、前記半導体製造装置において前記基板を収納する収納部である前記半導体製造装置の構成要素を撮影し、
前記制御部は、前記撮影画像に基づいて、前記収納部の異常を検出する、半導体製造装置システム。
【請求項4】
前記収納部は、前記基板が載置される基板載置部を含み、
前記撮影部は、前記基板が載置されていない状態の前記基板載置部を撮影し、
前記制御部は、前記撮影画像に基づいて、前記基板が載置されていない状態の前記基板載置部における異常を検出する、請求項3に記載の半導体製造装置システム。
【請求項5】
前記制御部は、前記収納部の異常が検出された場合に、前記撮影画像に基づいて前記収納部に収納されている前記基板の状態を検出する、請求項3に記載の半導体製造装置システム。
【請求項6】
前記制御部は、予め設定された基準画像と前記撮影部により撮影された前記撮影画像とを比較することによって前記半導体製造装置の構成要素の異常を検出する、請求項1に記載の半導体製造装置システム。
【請求項7】
前記制御部により前記半導体製造装置の構成要素の異常が検出された場合に、前記半導体製造装置の構成要素の異常が検出されたことを示す異常検出信号を出力する通信部をさらに備える、請求項1に記載の半導体製造装置システム。
【請求項8】
前記制御部は、前記撮影画像に基づいて、前記半導体製造装置の構成要素における異常の兆候を検出するとともに、異常が生じるまでの期間を予測する、請求項1に記載の半導体製造装置システム。
【請求項9】
前記制御部は、予め設定された所定の間隔ごとに撮影された前記撮影画像に基づいて前記半導体製造装置の構成要素の異常を検出する、請求項1に記載の半導体製造装置システム。
発明の詳細な説明
【技術分野】
【0001】
この開示は、半導体製造装置システムに関し、特に、基板保持ハンドを備える半導体製造装置システムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、基板を保持するハンドを備える薄型基板搬送用ロボットが知られている。たとえば、特許文献1参照。
【0003】
上記特許文献1には、収納カセットから薄型基板を搬出する薄型基板搬送用ロボットが開示されている。薄型基板搬送用ロボットは、水平面内で旋回する第1アームおよび第2アームと、第2アームに取り付けられているフォークとを備えている。フォークは、薄型基板を載置するためのメカニカルハンドである。そして、上記特許文献1に記載の薄型基板搬送用ロボットは、カセット内に薄型基板が正しい姿勢で収納されているか否かの検査のために、収納カセット内の薄型基板の収納状態を検出するカメラを備えている。
【先行技術文献】
【特許文献】
【0004】
特開2002-224982号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、基板に対する搬送、処理、および、収納の少なくとも1つを行う半導体製造装置において基板を収納する収納部に異常がある場合には、収納部に基板を搬送することが困難となる。また、収納部に限らず、半導体製造装置に異常がある場合には、基板の搬送、処理、および、収納が困難になると考えられる。しかしながら、上記特許文献1の薄型基板搬送用ロボットでは、収納カセット内の基板を検出するカメラは、半導体製造装置の構成要素を撮影するようには構成されておらず、半導体製造装置の異常を検出することができない。そのため、基板に対する搬送、処理、および、収納の少なくとも1つを行う半導体製造装置の異常を検出することが望まれている。
【0006】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、基板に対する搬送、処理、および、収納の少なくとも1つを行う半導体製造装置の異常を検出可能な半導体製造装置システムを提供することである。
【課題を解決するための手段】
【0007】
この開示の第1の局面による半導体製造装置システムは、基板を保持する基板保持ハンドと、基板に対する搬送、処理、および、収納の少なくとも1つを行う半導体製造装置の異常を検出するために少なくとも半導体製造装置の構成要素を撮影する撮影部と、基板保持ハンドを移動させることによって、半導体製造装置に対して基板保持ハンドに保持された基板を搬送する基板搬送ロボットと、撮影部により撮影された撮影画像に基づいて、基板搬送ロボットにより基板が搬送される半導体製造装置の構成要素の異常を検出する制御部と、を備え、制御部は、撮影部による撮影画像に基づいて、少なくとも半導体製造装置の構成要素における形状変化を含む異常を検出する。
この開示の第2の局面による半導体製造装置システムは、基板を保持する基板保持ハンドと、基板に対する搬送、処理、および、収納の少なくとも1つを行う半導体製造装置の異常を検出するために少なくとも半導体製造装置の構成要素を撮影する撮影部と、撮影部により撮影された撮影画像に基づいて半導体製造装置の構成要素の異常を検出する制御部と、を備え、制御部は、撮影部による撮影画像に基づいて、半導体製造装置の構成要素における形状変化と、半導体製造装置の構成要素が欠損した異物の検知との少なくとも一つを含む異常を検出し、撮影部は、半導体製造装置において基板を収納する収納部である半導体製造装置の構成要素を撮影し、制御部は、撮影画像に基づいて、収納部の異常を検出する。
【0008】
この開示の第1および第2の局面による半導体製造装置システムは、上記のように、基板に対する搬送、処理、および、収納の少なくとも1つを行う半導体製造装置の異常を検出するために少なくとも半導体製造装置の構成要素を撮影する撮影部と、撮影部により撮影された撮影画像に基づいて半導体製造装置の構成要素の異常を検出する制御部と、を備える。これにより、半導体製造装置の異常を検出するために少なくとも半導体製造装置の構成要素を撮影することによって、半導体製造装置の異常を検出するための撮影画像を取得できる。その結果、取得した撮影画像に基づいて、基板に対する搬送、処理、および、収納の少なくとも1つを行う半導体製造装置の異常を検出できる。
【発明の効果】
【0009】
本開示によれば、基板に対する搬送、処理、および、収納の少なくとも1つを行う半導体製造装置の異常を検出できる。
【図面の簡単な説明】
【0010】
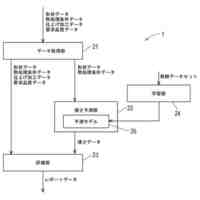
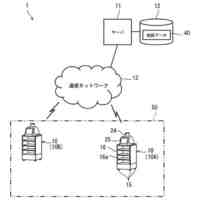
第1実施形態による基板処理システムの全体構成を示したブロック図である。
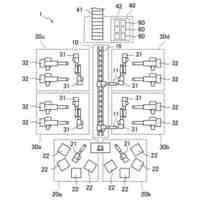
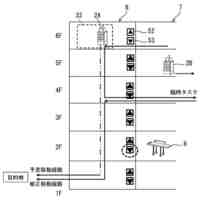
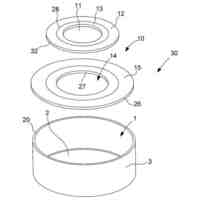
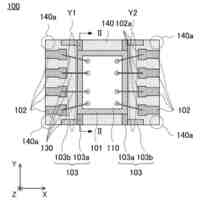
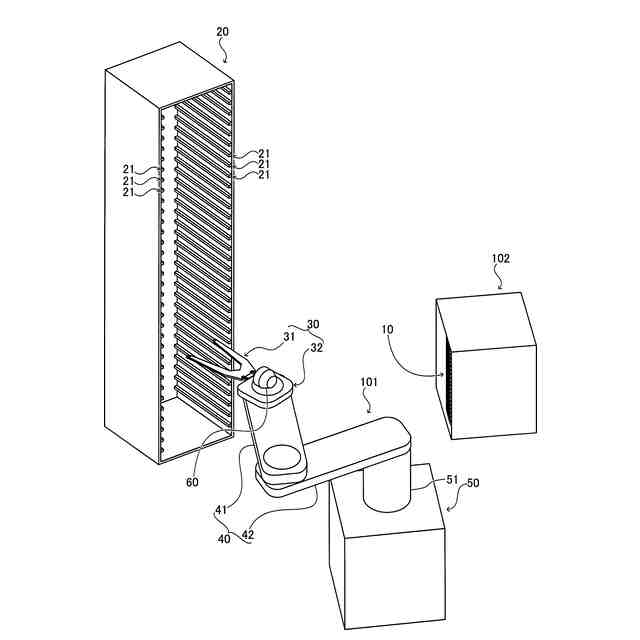
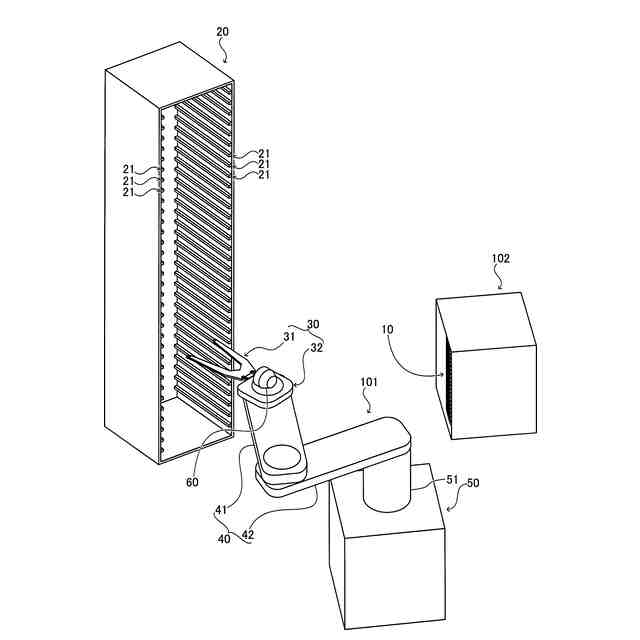
第1実施形態による基板搬送ロボット、収納容器、および、処理装置の収納部の構成を示した模式図である。
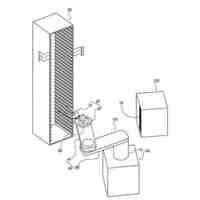
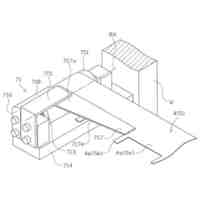
アーム部および昇降機構部を説明するための斜視図である。
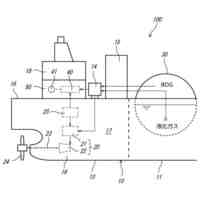
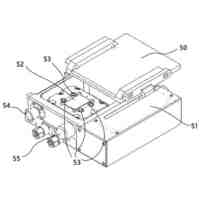
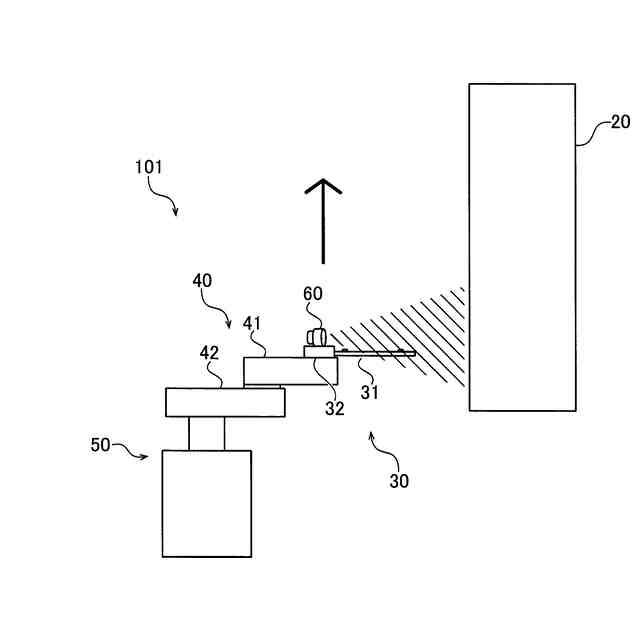
撮影部による収納部の撮影を説明するための側面図である。
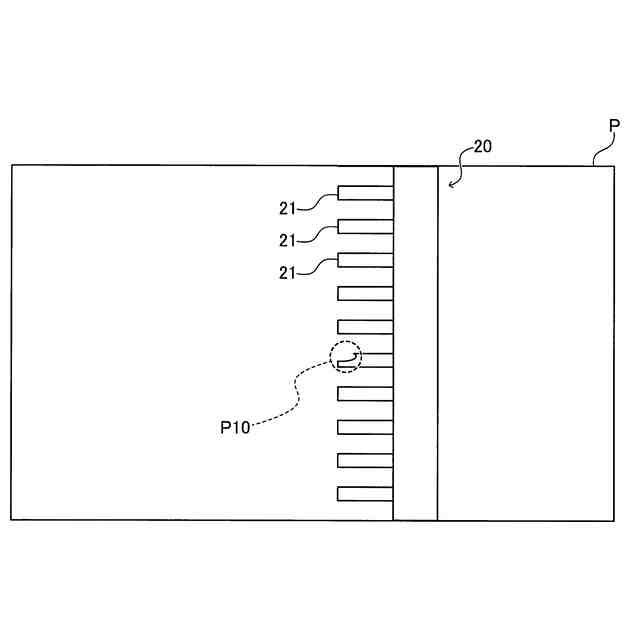
撮影画像の一例を示した図である。
基準画像の一例を示した図である。
撮影画像に基づく位置ずれの検出を説明するための図である。
撮影画像に基づく異物の検出を説明するための図である。
異常が検出された場合における表示装置の表示の一例を示した図である。
予測される異常が検出された場合における表示装置の表示の一例を示した図である。
第1実施形態による異常検出方法を説明するためのフローチャート図である。
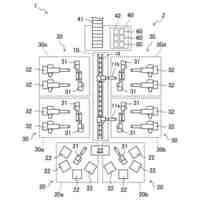
第2実施形態による基板処理システムの全体構成を示したブロック図である。
第2実施形態による撮影画像の一例を示した模式図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
作業設備
6日前
川崎重工業株式会社
ロボット
28日前
川崎重工業株式会社
燃料供給設備
27日前
川崎重工業株式会社
搬送システム
6日前
川崎重工業株式会社
液化ガス運搬船
27日前
川崎重工業株式会社
GHG排出量推定装置
28日前
川崎重工業株式会社
二酸化炭素分離システム
5日前
川崎重工業株式会社
プロペラダクトの支持構造
1か月前
川崎重工業株式会社
パレット及びロボットシステム
6日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
5日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
5日前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
5日前
川崎重工業株式会社
浸炭製品の硬さ予測装置及び方法
5日前
川崎重工業株式会社
溶接器具の冷却システムおよびロボットシステム
12日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
27日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
27日前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
8日前
川崎重工業株式会社
ロボットシステムおよびロボットシステムの制御方法
1か月前
川崎重工業株式会社
情報処理装置
20日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
28日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
28日前
川崎重工業株式会社
経路計画装置、運転支援システム、経路計画方法及び経路計画プログラム
8日前
川崎重工業株式会社
ワーク搬送ロボットの干渉確認方法およびワーク搬送ロボットの干渉確認装置
今日
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び制御プログラム
1か月前
川崎重工業株式会社
基板搬送ロボット、異常検出方法、および、プログラム
20日前
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び自律ロボットの制御プログラム
1か月前
東レ株式会社
積層多孔質膜
2日前
株式会社ExH
電流開閉装置
29日前
株式会社潤工社
同軸ケーブル
27日前
レナタ・アーゲー
電池
1か月前
個人
鉄心用材料とその製造方法
1か月前
CKD株式会社
巻回装置
1日前
株式会社クオルテック
空気電池
1か月前
株式会社メルビル
ステージ
1か月前
エイブリック株式会社
半導体装置
29日前
個人
マルチバンドコイルアンテナ
14日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ