TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025111260
公報種別
公開特許公報(A)
公開日
2025-07-30
出願番号
2024005580
出願日
2024-01-17
発明の名称
農作業機
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01C
15/00 20060101AFI20250723BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】肥沃度センサにて圃場の肥沃度を検出して圃場区画毎の肥沃度に合わせた施肥量調節が行なえる施肥作業機がある。然しながら、肥沃度センサは駆動回転する左右前輪に設けられており、肥沃度の検出後直ちに施肥装置の施肥量を自動調節しなければならず、調節が間に合わないような事態が発生し、適切な施肥量の自動調節が行い難いものであった。そこで、適切な施肥量の自動調節が行えて良好な施肥作業が行える農作業機を提供する。
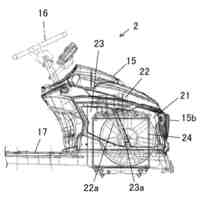
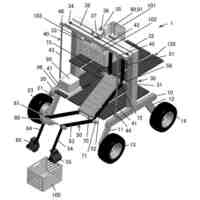
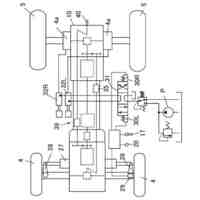
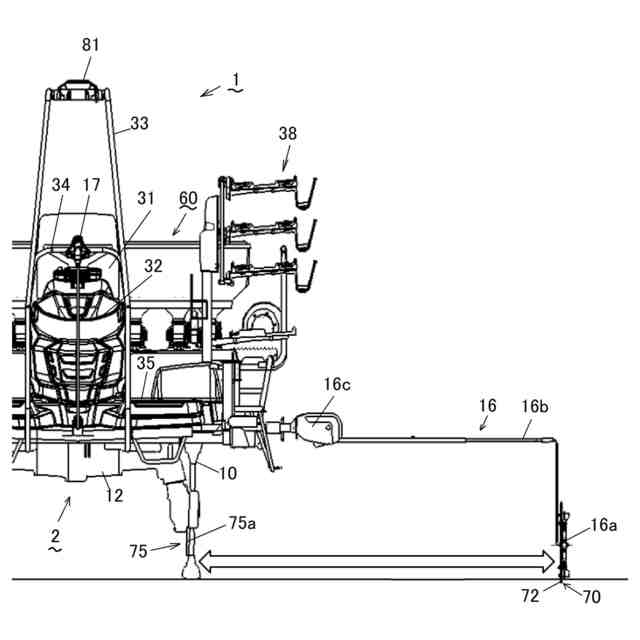
【解決手段】走行車体2の左右車輪10に肥沃度を測定する電極75aを備え、左右線引マーカ16のマーカ16aに肥沃度を測定する電極72を備え、作業状態の線引マーカ16の電極72と作業状態の線引マーカ16側の車輪10の電極75a間で肥沃度を検出し、該検出した次工程の肥沃度に応じて次工程で施肥量調節装置を作動させて施肥装置60の施肥量を自動調節する。
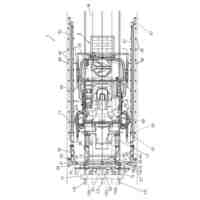
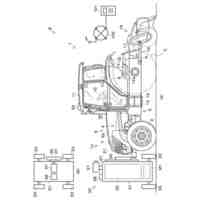
【選択図】図2
特許請求の範囲
【請求項1】
走行車体(2)に施肥量調節装置にて施肥量が調節される施肥装置(60)を装着し、圃場(F)に次工程の直進の目安となるガイド線を形成する左右線引マーカ(16)を作業状態と圃場(F)から上方に退避した状態に切り換え自在に設けた農作業機において、走行車体(2)の左右車輪(10)に肥沃度を測定する電極(75a)を備え、左右線引マーカ(16)のマーカ(16a)に肥沃度を測定する電極(72)を備え、作業状態の線引マーカ(16)の電極(72)と作業状態の線引マーカ(16)側の車輪(10)の電極(75a)間で肥沃度を検出し、該検出した次工程の肥沃度に応じて次工程で施肥量調節装置を作動させて施肥装置(60)の施肥量を自動調節することを特徴とする農作業機。
続きを表示(約 720 文字)
【請求項2】
左右車輪(10)の電極(75a)間で肥沃度を同時に検出することを特徴とする請求項1記載の農作業機。
【請求項3】
農作業機がGNSS制御装置を備えた可変施肥田植機であり、作業状態の線引マーカ(16)の電極(72)と作業状態の線引マーカ(16)側の車輪(10)の電極(75a)間で検出した肥沃度をマップ情報に取り込み、次工程の田植作業工程で左右車輪(10)の電極(75a)間で検出した肥沃度と組み合わせて施肥量調節装置を作動させて施肥装置(60)の施肥量を自動調節することを特徴とする請求項2に記載の農作業機。
【請求項4】
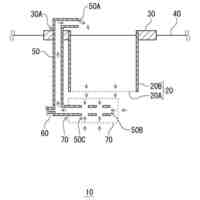
線引マーカ(16)に設けた枢支軸(77a)に回動自在に上下に長い電極(72b)を枢支し、電極(72b)の枢支軸(77a)から下端までの長さがマーカ(16a)の外径よりも大きく、マーカ(16a)が接地した時に電極(72b)下部が地中に埋まり、電極(72b)の下部が枢支軸(77a)にて4時の位置から8時の位置ぐらいまで回動自在であり、機体が前進すると泥土に対して抵抗するようにバネ(79)の付勢力が働くことを特徴とする請求項1記載の農作業機。
【請求項5】
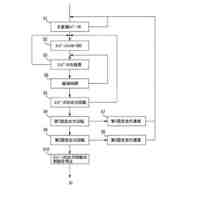
コントローラ(25)が電極(72b)の傾斜角度と泥土の硬軟のテーブルを記憶し、作業者が設定した設定感度よりも電極(72b)の傾斜角度により算出される泥土の硬さが硬いことを算出した場合は硬い側に設定感度を補正し、作業者が設定した設定感度よりも電極(72b)の傾斜角度により算出される泥土の硬さが軟らかいことを算出した場合は軟らかい側に設定感度を補正することを特徴とする請求項4記載の農作業機。
発明の詳細な説明
【技術分野】
【0001】
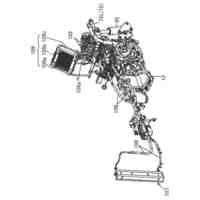
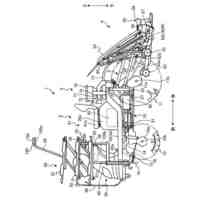
本発明は、走行車体に施肥装置を装着した農作業機に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
肥沃度センサにて圃場の肥沃度を検出して圃場区画毎の肥沃度に合わせた施肥量調節が行なえる施肥作業機がある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2013-146219号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
肥沃度センサは駆動回転する左右前輪に設けられており、肥沃度の検出後直ちに施肥装置の施肥量を自動調節しなければならず、調節が間に合わないような事態が発生し、適切な施肥量の自動調節が行い難いものであった。
【0005】
本発明は、上記に鑑みてなされたものであって、適切な施肥量の自動調節が行えて良好な施肥作業が行える農作業機を提供することを目的とする。
【課題を解決するための手段】
【0006】
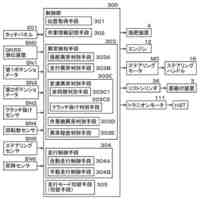
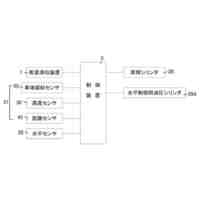
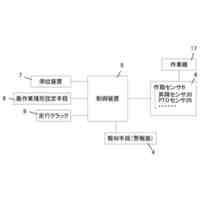
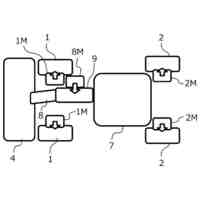
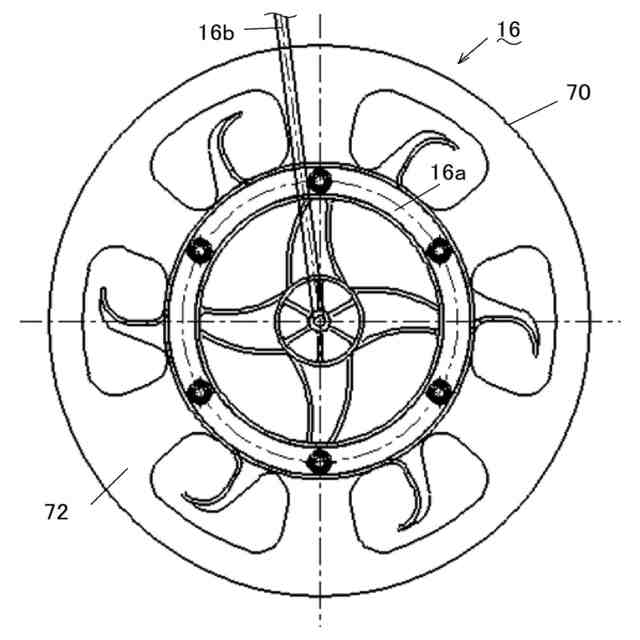
請求項1記載の発明は、走行車体2に施肥量調節装置にて施肥量が調節される施肥装置60を装着し、圃場Fに次工程の直進の目安となるガイド線を形成する左右線引マーカ16を作業状態と圃場Fから上方に退避した状態に切り換え自在に設けた農作業機において、走行車体2の左右車輪10に肥沃度を測定する電極75aを備え、左右線引マーカ16のマーカ16aに肥沃度を測定する電極72を備え、作業状態の線引マーカ16の電極72と作業状態の線引マーカ16側の車輪10の電極75a間で肥沃度を検出し、該検出した次工程の肥沃度に応じて次工程で施肥量調節装置を作動させて施肥装置60の施肥量を自動調節する農作業機である。
【0007】
請求項1記載の発明によれば、作業状態の線引マーカ16の電極72と作業状態の線引マーカ16側の車輪10の電極75a間で肥沃度を検出し、該検出した次工程の肥沃度に応じて次工程で施肥量調節装置を作動させて施肥装置60の施肥量を自動調節するので、次工程の圃場Fの肥沃度を前もって測定でき、測定した肥沃度に応じて次工程で施肥量調節装置を作動させて施肥量を自動調節し、正確なタイミングで肥沃度に応じた精度の高い施肥制御が可能となる。
【0008】
請求項2記載の発明は、左右車輪10の電極75a間で肥沃度を同時に検出する請求項1記載の農作業機である。
【0009】
請求項3記載の発明は、農作業機がGNSS制御装置を備えた可変施肥田植機であり、作業状態の線引マーカ16の電極72と作業状態の線引マーカ16側の車輪10の電極75a間で検出した肥沃度をマップ情報に取り込み、次工程の田植作業工程で左右車輪10の電極75a間で検出した肥沃度と組み合わせて施肥量調節装置を作動させて施肥装置60の施肥量を自動調節する請求項2に記載の農作業機である。
【0010】
請求項4記載の発明は、線引マーカ16に設けた枢支軸77aに回動自在に上下に長い電極72bを枢支し、電極72bの枢支軸77aから下端までの長さがマーカ16aの外径よりも大きく、マーカ16aが接地した時に電極72b下部が地中に埋まり、電極72bの下部が枢支軸77aにて4時の位置から8時の位置ぐらいまで回動自在であり、機体が前進すると泥土に対して抵抗するようにバネ79の付勢力が働く請求項1記載の農作業機である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
10日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
28日前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
18日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
農作業車
今日
井関農機株式会社
農作業車
4日前
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
4日前
井関農機株式会社
田植え機
4日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
コンバイン
28日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
圃場作業機
21日前
井関農機株式会社
コンバイン
10日前
井関農機株式会社
充電システム
21日前
井関農機株式会社
根菜類収穫機
4日前
井関農機株式会社
汎用コンバイン
24日前
井関農機株式会社
乗用電動芝刈り機
11日前
井関農機株式会社
作業車両の走行経路生成システム
12日前
井関農機株式会社
バイオ燃料利用ディーゼルエンジン
26日前
井関農機株式会社
田植え機
4日前
井関農機株式会社
作業車両
今日
個人
虫捕り器
今日
個人
巻糸係止具
21日前
個人
飼育容器
10日前
個人
植物栽培用培地
1か月前
個人
虫の生け捕り具
1か月前
個人
後付巻降ろし器
今日
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ