TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117705
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024012572
出願日
2024-01-31
発明の名称
駆動装置
出願人
日本精工株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B25J
19/06 20060101AFI20250805BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】高精度な衝突検知が可能な駆動装置を提供すること。
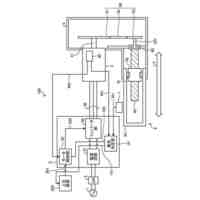
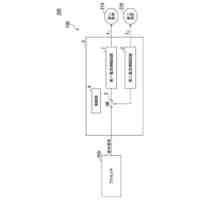
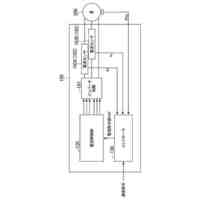
【解決手段】モータと、高い減速比を有し、且つ、高いバックドライバビリティを有する減速機と、主軸に固定されたアームと、モータの電流指令値を生成する制御回路と、を備える。制御回路は、アームに対する角速度指令値を生成する速度指令値生成部と、角速度指令値に基づきモータの電流指令値を生成する速度制御部と、電流指令値、アームの角速度、及びモータの角速度に基づき、アームに加えられた外部トルクの推定値を推定する外乱オブザーバと、を備える。速度指令値生成部は、外部トルクの推定値τ
L_est
が所定の閾値τ
L_th
を超えている場合に、角速度指令値ω
L_ref
をゼロとする。
【選択図】図8
特許請求の範囲
【請求項1】
モータと、
前記モータの回転速度を減速して主軸に出力する減速機と、
前記主軸に固定されたアームと、
前記モータの電流指令値を生成する制御回路と、
を備え、
前記制御回路は、
前記アームに対する角速度指令値を生成する速度指令値生成部と、
前記角速度指令値に基づき前記電流指令値を生成する速度制御部と、
前記電流指令値、前記アームの角速度、及び前記モータの角速度に基づき、前記アームに加えられた外部トルクの推定値を推定する外乱オブザーバと、
を備え、
前記速度指令値生成部は、
前記外部トルクの推定値が所定の閾値を超えている場合に、前記角速度指令値をゼロとする、
駆動装置。
続きを表示(約 750 文字)
【請求項2】
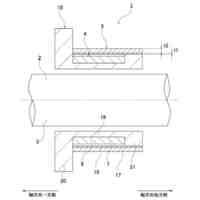
前記モータの回転角度を検出するモータ角度検出部と、
前記アームの回転角度を検出する主軸角度検出部と、
を備え、
前記外乱オブザーバは、
前記アームの回転角度を疑似微分して前記アームの角速度を算出し、
前記モータの回転角度を疑似微分して前記モータの角速度を算出する、
請求項1に記載の駆動装置。
【請求項3】
前記外乱オブザーバは、
前記外部トルクの推定値を推定する際に、前記アームの重力トルク成分を補償する、
請求項2に記載の駆動装置。
【請求項4】
前記外乱オブザーバは、
前記外部トルクの推定値を推定する際に、前記モータの摩擦トルク成分を補償する、
請求項2に記載の駆動装置。
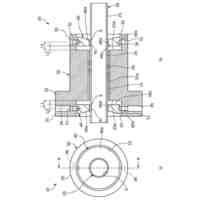
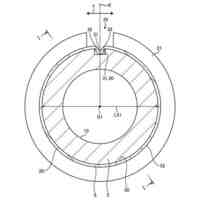
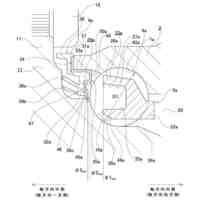
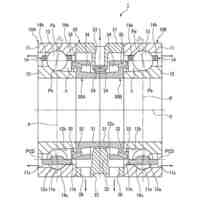
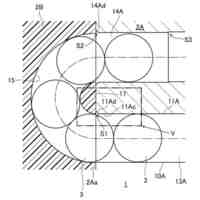
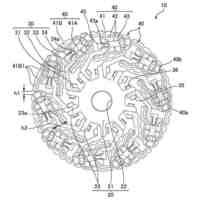
【請求項5】
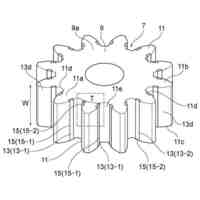
前記減速機は、
前記軸心を中心として等間隔に設けられた複数の遊星軸心を中心としてそれぞれ回転可能に設けられる複数の第1遊星歯車と、
複数の前記遊星軸心を中心としてそれぞれ回転可能に設けられ、前記第1遊星歯車よりも径が小さく歯数が少なく、前記第1遊星歯車と一体に設けられて共に回転する複数の第2遊星歯車と、
前記軸心を中心として設けられ、前記遊星軸心の径方向内側において前記第1遊星歯車と噛み合う太陽歯車と、
前記軸心を中心としてリング形状に設けられ、前記遊星軸心の径方向外側において前記第1遊星歯車と噛み合う第1内歯車と、
前記軸心を中心としてリング形状に設けられ、前記遊星軸心の径方向外側において前記第2遊星歯車と噛み合う第2内歯車と、
を含む、
請求項1から4の何れか一項に記載の駆動装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、駆動装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えば産業用ロボットの関節駆動系を構成する駆動装置として、減速機とモータとを組み合わせたアクチュエータが用いられる。このような駆動装置においては、ロボットの関節動作に必要なトルクを得るために50:1~200:1程度の高い減速比を有する減速機が採用される。
【0003】
人とロボットとが作業空間を共有する協働ロボットシステムでは、人との接触による危険回避の観点から、バックドライバビリティ(逆駆動性:外力による関節駆動性)の向上が望まれている。一般に、減速比が高い減速機では逆駆動効率が低下する。このため、駆動装置としてのバックドライバビリティが低下する傾向がある。下記特許文献1では、制御モードを切り替えることなく速やかにバックドライブ(外力に応じた反力低減動作)を開始する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2019-49852号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来技術は、バックドライバビリティが低い駆動系において、外部トルクの推定値及び角度伝達誤差外乱の推定値を用いたトルクフィードバック制御により、バックドライバビリティを向上させる構成である。逆駆動効率が低い減速機を用いた構成において、外部トルクの推定値に閾値を設けて衝突検知を行う場合、減速機の逆駆動効率の低さに起因してトルク推定値に誤差が生じ、衝突検知精度が低下する可能性がある。
【0006】
本発明は、上記の課題に鑑みてなされたものであって、高精度な衝突検知が可能な駆動装置を提供すること、を目的としている。
【課題を解決するための手段】
【0007】
上記の目的を達成するため、本発明の一態様に係る駆動装置は、モータと、前記モータの回転速度を減速して主軸に出力する減速機と、前記主軸に固定されたアームと、前記モータの電流指令値を生成する制御回路と、を備え、前記制御回路は、前記アームに対する角速度指令値を生成する速度指令値生成部と、前記角速度指令値に基づき前記電流指令値を生成する速度制御部と、前記電流指令値、前記アームの角速度、及び前記モータの角速度に基づき、前記アームに加えられた外部トルクの推定値を推定する外乱オブザーバと、を備え、前記速度指令値生成部は、前記外部トルクの推定値が所定の閾値を超えている場合に、前記角速度指令値をゼロとする。
【0008】
上記構成では、高精度なアームへの衝突検知が可能となる。また、衝突発生時においてモータの駆動によるアームの駆動(順駆動)が停止し、安全性が確保される。
【0009】
駆動装置の望ましい態様として、前記モータの回転角度を検出するモータ角度検出部と、前記アームの回転角度を検出する主軸角度検出部と、を備え、前記外乱オブザーバは、前記アームの回転角度を疑似微分して前記アームの角速度を算出し、前記モータの回転角度を疑似微分して前記モータの角速度を算出することが好ましい。
【0010】
これにより、急峻な反応の微分キックを避けることができるので、制御性が向上する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精工株式会社
ボールねじ
1か月前
日本精工株式会社
遊星歯車装置
1か月前
日本精工株式会社
リニアガイド
1か月前
日本精工株式会社
アクチュエータ
2日前
日本精工株式会社
ボールねじ装置
8日前
日本精工株式会社
円すいころ軸受
7日前
日本精工株式会社
転がり案内装置
15日前
日本精工株式会社
密封型転がり軸受
8日前
日本精工株式会社
密封型転がり軸受
8日前
日本精工株式会社
密封型転がり軸受
8日前
日本精工株式会社
密封型転がり軸受
8日前
日本精工株式会社
密封型転がり軸受
8日前
日本精工株式会社
密封型転がり軸受
8日前
日本精工株式会社
密封型転がり軸受
8日前
日本精工株式会社
ハブユニット軸受
1か月前
日本精工株式会社
突入電流抑止回路
1か月前
日本精工株式会社
アンギュラ玉軸受
1か月前
日本精工株式会社
磁歪式トルクセンサ
1か月前
日本精工株式会社
磁歪式トルクセンサ
17日前
日本精工株式会社
逆入力遮断クラッチ
1日前
日本精工株式会社
モータ制御システム
16日前
日本精工株式会社
直動案内装置の組立方法
21日前
日本精工株式会社
アクチュエータシステム
23日前
日本精工株式会社
ラジアルころ軸受用保持器
7日前
日本精工株式会社
ボールねじ部品の製造方法
1か月前
日本精工株式会社
潤滑機能付き転がり軸受装置
1か月前
日本精工株式会社
直動案内装置及びその製造方法
21日前
日本精工株式会社
片持ち回転ローラ配置型円形車輪
7日前
日本精工株式会社
回路放熱機構および回路放熱方法
1か月前
日本精工株式会社
ころ軸受及びころ軸受の設計方法
21日前
協同油脂株式会社
グリース組成物
23日前
日本精工株式会社
ハブユニット軸受及びその製造方法
7日前
日本精工株式会社
モータ制御装置およびモータ制御方法
1か月前
日本精工株式会社
含油部材付歯車、直動アクチュエータ
25日前
日本精工株式会社
転がり軸受及び転がり軸受の製造方法
1か月前
日本精工株式会社
ボールねじの設計方法およびボールねじ
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ