TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123815
公報種別
公開特許公報(A)
公開日
2025-08-25
出願番号
2024019516
出願日
2024-02-13
発明の名称
レーダシステム及びレーダ信号処理方法
出願人
株式会社東芝
代理人
弁理士法人スズエ国際特許事務所
主分類
G01S
7/292 20060101AFI20250818BHJP(測定;試験)
要約
【課題】 SIMOによる常時観測方式でも、少ない処理規模で、レンジウォーク及びドップラウォークによる積分ロスを低減し、MDSによる高精度な目標識別を可能とする。
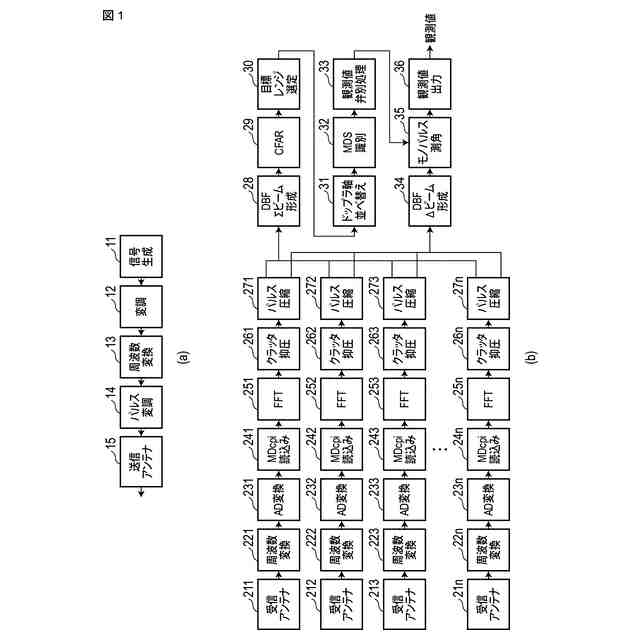
【解決手段】 実施形態に係るレーダシステムは、SIMO方式で観測範囲を常時観測し、繰り返し送信パルスの反射信号を受信する場合に、ms番目のCPIの受信信号を入力した際に、ms番目のCPIを含んで過去のMD単位のCPI分のデータを用いて長時間積分処理を実行し、長時間積分結果をms番目のRDデータ(RDms)として保存し、RDデータに目標検出処理を実行して目標の検出レンジセルに対応した、RDms~RDms-MS+1のRDデータを配列してMDSデータを生成し、MDSデータからCNN及び特徴量の抽出によって目標を識別し、目標の識別結果を含んだ検出セルに対して測角処理して、3次元情報を観測値として出力する。
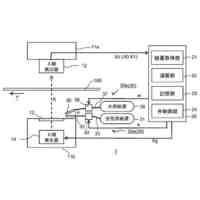
【選択図】図1
特許請求の範囲
【請求項1】
観測範囲に対して、送信はファンビームを形成し、受信はマルチビ-ムを形成するSIMO(Single Input Multiple Output)方式で観測範囲を常時観測し、繰り返し送信されるパルスの反射信号を受信するレーダシステムにおいて、
ms番目のCPI(Coherent Pulse Interval)の受信信号を入力した際に、ms番目のCPIを含んで過去のMD単位のCPI分のデータを用いて長時間積分処理を実行する手段と、
前記長時間積分処理した結果をms番目のRD(Range-Doppler:レンジ-ドップラ)データ(RDms)として保存する手段と、
前記RDデータに目標検出処理を実行して目標の検出レンジセルに対応した、RDms~RDms-MS+1のRDデータを配列してMDS(Micro Doppler Spectrogram)データを生成する手段と、
前記MDSデータからCNN(Convolutional Neural Network)及び特徴量の抽出によって目標を識別する手段と、
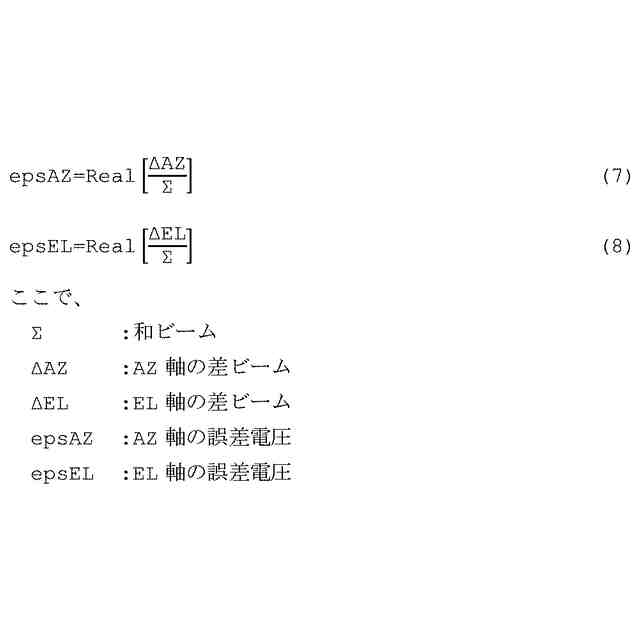
前記目標の識別結果を含んだ検出セルに対して測角処理して、3次元情報を観測値として出力する手段と
を具備するレーダシステム。
続きを表示(約 1,000 文字)
【請求項2】
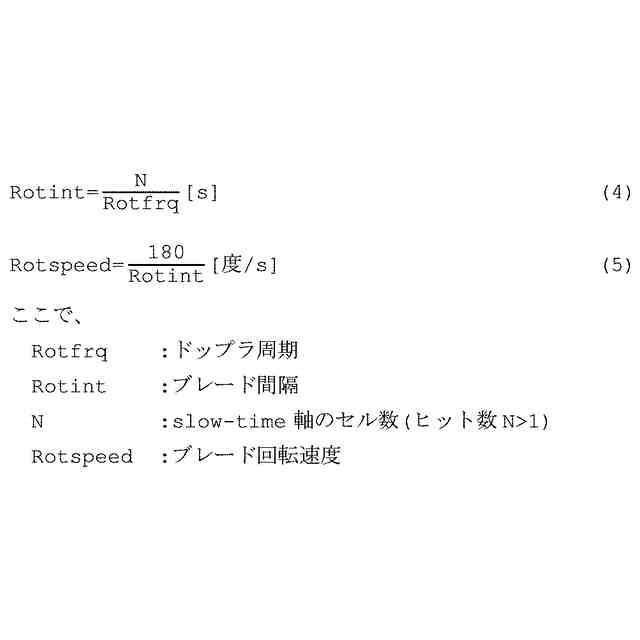
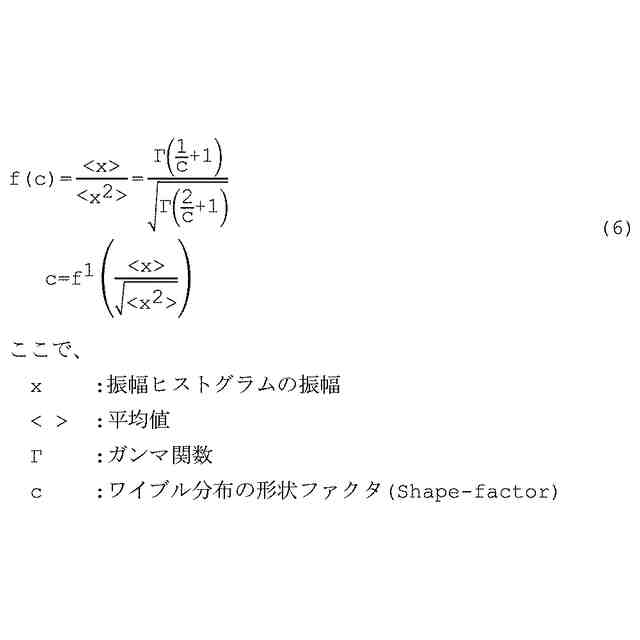
前記特徴量として、前記目標の検出セルのSN、ドップラ中心値、MDSをドップラ軸方向に振幅加算した結果が所定の振幅閾値を超えるtime-indexのMDS結果を用いて振幅ヒストグラムを生成し、その形状よりワイブル分布の形状ファクタを算出した結果と、選定したtime-index毎のMDSのドップラ周期より算出したブレード回転速度により、前記目標を識別する
請求項1記載のレーダシステム。
【請求項3】
前記長時間積分処理は、
前記目標の運動時間軸オフセットを含めて、Nm(Nm≧1)次×2(時間軸オフセット)モデルで表現して、レンジ周波数軸の参照信号を生成し、
前記レンジ周波数軸で最大値探索法により2Nm次個の相関処理を行ってレンジ軸に変換し、
前記レンジ軸に変換された相関処理結果の最大値により補正係数を決定して補正して長時間積分処理を行い、
さらにPGA(Phase Gradient Autofocus)により補正した長時間積分結果を用いて、MDS識別及びモノパルス測角を行い、3次元情報を観測値として出力する
請求項1記載のレーダシステム。
【請求項4】
観測範囲に対して、送信はファンビームを形成し、受信はマルチビ-ムを形成するSIMO(Single Input Multiple Output)方式で観測範囲を常時観測し、繰り返し送信されるパルスの反射信号を受信するレーダシステムのレーダ信号処理方法において、
ms番目のCPI(Coherent Pulse Interval)の受信信号を入力した際に、ms番目のCPIを含んで過去のMD単位のCPI分のデータを用いて長時間積分処理を実行し、
前記長時間積分処理した結果をms番目のRD(Range-Doppler:レンジ-ドップラ)データ(RDms)として保存し、
前記RDデータに目標検出処理を実行して目標の検出レンジセルに対応した、RDms~RDms-MS+1のRDデータを配列してMDS(Micro Doppler Spectrogram)データを生成し、
前記MDSデータからCNN(Convolutional Neural Network)及び特徴量の抽出によって目標を識別し、
前記目標の識別結果を含んだ検出セルに対して測角処理して、3次元情報を観測値として出力する
レーダシステムのレーダ信号処理方法。
発明の詳細な説明
【技術分野】
【0001】
本実施形態は、レーダシステム及びレーダ信号処理方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来のレーダシステムにあっては、目標を常時識別可能とする場合、観測範囲に対して、送信はファンビームを形成し、受信はマルチビ-ムを形成して、観測範囲を常時観測するSIMO(Single Input Multiple Output)方式を採用する。このSIMO方式は、観測空間を常時観測できるため、高データレートに観測できる長所がある。しかしながら、送信がファンビームであるため、所定のSN(Signal to Noise)を確保するためには長時間の積分が必要になる。
【0003】
これに加えて、目標の識別を高精度に行うために、MDS(Micro Doppler Spectrogram)を用いる識別方式の採用が考えられる。しかしながら、この識別方式の採用に際して、やはりSN確保のために長時間の積分を行う必要があり、さらに処理規模が増える。また、積分ヒット数が多い場合には、レンジウォークやドップラウォークにより、積分ロスが生じる課題がある。
【0004】
この対策のために、例えば積分系列最大化(速度・加速度補正)による手法が提案されている(特許文献1参照)。この手法は、速度及び加速度の探索法で、積分系列を最大化することで積分ロスを低減する。しかしながら、この手法でも、レンジウォークやドップラウォークが大きい場合は、速度及び加速度の探索法の範囲が増えて、さらに処理規模が増える問題がある。
【先行技術文献】
【特許文献】
【0005】
特許第5025403号公報
特許第5072694号公報
【非特許文献】
【0006】
MDS(Micro Doppler Spectrogram)による識別:Peter Klaer, ‘An Investigation of Rotary Drone HERM Line Spectrum under Manoeuvering Condition’, Sensors 2020,20,5940
パルス圧縮:大内、‘リモートセンシングのための合成開口レーダの基礎’、東京電機大学出版局、pp.131-149(2003)
CFAR(Constant False Alarm Rate):吉田、‘改訂レーダ技術’、電子情報通信学会、pp.87-89(1996)
CNN(Convolutional Neural Network):斎藤、‘ゼロから作るDeep Learning’オライリー・ジャパン、pp.205-221(2016)
ワイブル分布:関根、‘レーダ信号処理技術’、電子情報通信学会、pp.115-119(1991)
モノパルス測角:吉田、‘改訂レーダ技術’、電子情報通信学会、pp.260-264(1996)
高次補正方式:Penghui Huang,‘Long-Time Coherent Integration for Weak Maneuvering Target Detection and High-Order Motion Parameter Estimation Based on Keystone Transform’, IEEE Trans. On SIGNAL PROCESSING, VOL.64, NO.15, AUGUST 1, pp.4013-4026(2016)
PGA(Phase gradient autofocus)方式:Charles V. Jakowatz, ‘Spotlight-Mode Synthetic Aperture Radar: A Signal Processing Approach’, Springer, pp.251-256(1996)
【発明の概要】
【発明が解決しようとする課題】
【0007】
以上述べたように、従来のSIMOによる常時観測方式のレーダシステムでは、長時間積分時のレンジウォーク及びドップラウォークによる積分ロスの低減に対処するためには、処理規模の増大が問題となっている。
【0008】
本実施形態の課題は、SIMOによる常時観測方式でも、少ない処理規模で、レンジウォーク及びドップラウォークによる積分ロスを低減し、MDSによる高精度な目標識別を可能とするレーダシステム及びレーダ信号処理方法を提供することにある。
【課題を解決するための手段】
【0009】
上記の課題を解決するために、実施形態に係るレーダシステムは、以下のように構成される。
【0010】
(1) 観測範囲に対して、送信はファンビームを形成し、受信はマルチビ-ムを形成するSIMO(Single Input Multiple Output)方式で観測範囲を常時観測するレーダシステムにおいて、ms番目のCPI(Coherent Pulse Interval)を入力した際に、ms番目のCPIを含んで過去のMD単位のCPI分のデータを用いて長時間積分した結果をms番目のRD(Range-Doppler:レンジ-ドップラ)データ(RDms)として保存すると共に目標検出処理を実行し、目標の検出レンジセルに対応した、RDms~RDms-MS+1のRDデータを配列してMDS(Micro Doppler Spectrogram)データを生成して、CNN(Convolutional Neural Network)や特徴量を抽出して識別し、目標識別結果を含んだ検出セルに対して、測角処理して、3次元情報を観測値として出力する(長時間積分識別レーダ)。すなわち、長時間積分の場合でも、検出用に用いたRDデータを用いて、MDSデータを生成して識別することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東芝
固定子
6日前
株式会社東芝
センサ
3か月前
株式会社東芝
センサ
23日前
株式会社東芝
ドア構造
9日前
株式会社東芝
遮断装置
1か月前
株式会社東芝
回転電機
4か月前
株式会社東芝
回転電機
4か月前
株式会社東芝
回転電機
4か月前
株式会社東芝
立て看板
2か月前
株式会社東芝
回転電機
2か月前
株式会社東芝
制御装置
2か月前
株式会社東芝
判定装置
1か月前
株式会社東芝
回路素子
22日前
株式会社東芝
搬送装置
1か月前
株式会社東芝
電子機器
1か月前
株式会社東芝
燃料電池
1か月前
株式会社東芝
配線治具
1か月前
株式会社東芝
電磁流量計
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
電動送風機
今日
株式会社東芝
半導体装置
3か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
真空バルブ
3か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
3か月前
株式会社東芝
半導体装置
4か月前
株式会社東芝
X線厚み計
28日前
株式会社東芝
主幹制御器
1か月前
株式会社東芝
ラック装置
2日前
株式会社東芝
半導体装置
3か月前
株式会社東芝
計測システム
15日前
株式会社東芝
ディスク装置
13日前
株式会社東芝
アイソレータ
2か月前
株式会社東芝
情報表示装置
4か月前
株式会社東芝
静止誘導電器
3か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ