TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025125736
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024021859
出願日
2024-02-16
発明の名称
ロボットシステム
出願人
株式会社不二越
代理人
個人
主分類
B25J
13/08 20060101AFI20250821BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業プログラムの実行を繰り返すサイクル中に位置決め誤差を精度良く補正する。
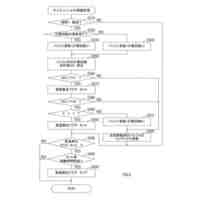
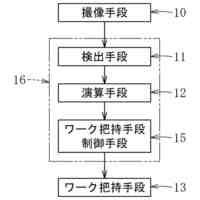
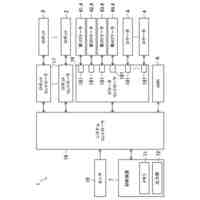
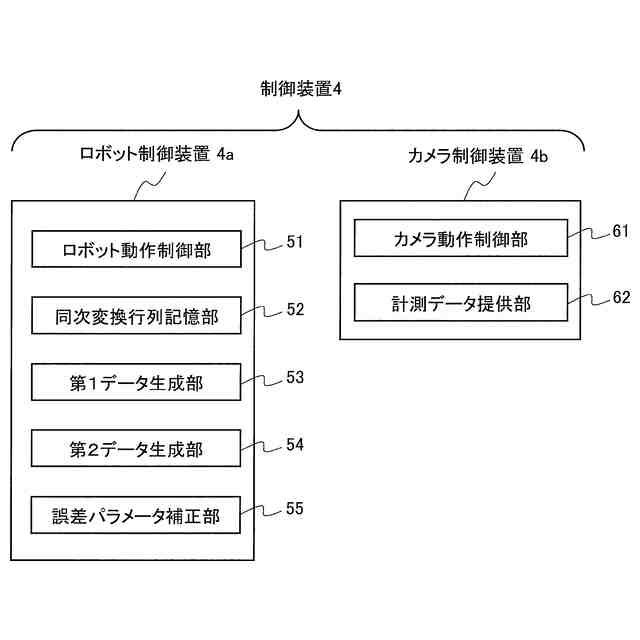
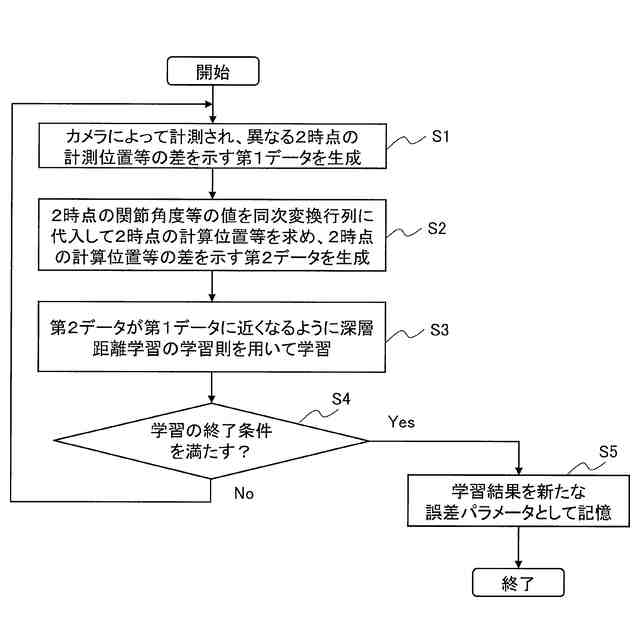
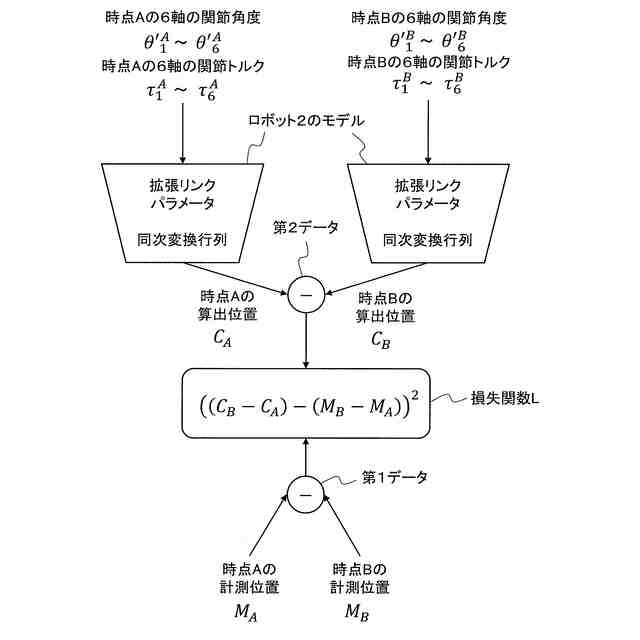
【解決手段】ロボットシステムの制御装置4は、誤差パラメータを含む同次変換行列を記憶する同次変換行列記憶部52と、カメラによって計測され、異なる2つの時点におけるロボットの少なくとも計測位置の差を含む第1データを生成する第1データ生成部53と、同次変換行列に基づいて算出され、2つの時点におけるロボットの少なくとも計算位置の差を含む第2データを生成する第2データ生成部54と、第2データが、第1データに近くなるように誤差パラメータを補正する誤差パラメータ補正部55と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットと、前記ロボットの位置を計測するカメラと、前記ロボット及び前記カメラの動作を制御する制御装置と、を備えるロボットシステムであって、
前記制御装置は、
前記ロボットに関する誤差パラメータを含む同次変換行列を記憶する同次変換行列記憶部と、
前記カメラによって計測され、異なる2つの時点における前記ロボットの少なくとも計測位置の差を含む第1データを生成する第1データ生成部と、
前記同次変換行列に基づいて算出され、前記2つの時点における前記ロボットの少なくとも計算位置の差を含む第2データを生成する第2データ生成部と、
前記第2データが、前記第1データに近くなるように前記誤差パラメータを補正する誤差パラメータ補正部と、
を備えることを特徴とするロボットシステム。
続きを表示(約 250 文字)
【請求項2】
前記誤差パラメータ補正部は、前記第1データを教師データとし、前記第2データを学習データとして、深層距離学習の学習手法を用いて前記誤差パラメータを学習する
ことを特徴とする請求項1に記載のロボットシステム。
【請求項3】
前記誤差パラメータ補正部は、前記ロボットのリンク長さの誤差、リンクねじれ角の誤差、リンク間距離の誤差、間接たわみの抵抗力及びバックラッシの大きさを前記誤差パラメータとして学習する
ことを特徴とする請求項2に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットモデルの位置決め誤差を補正するロボットシステムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
ロボットの動作制御では、ロボットの位置決め誤差を精度良く補正することが課題の一つである。位置決め誤差の要因として、例えば、関節たわみ、バックラッシ等が知られている。特許文献1は、測定機器等によって測定される実測位置と、ロボット機構モデルによって計算される計算位置との位置誤差を算出し、この位置誤差が最小となるように間接たわみ及びバックラッシを同定する。特許文献1では、静止時の関節トルクが大きい場合には角度誤差は関節たわみが支配的であるという仮定の下、静止時の関節トルクが大きくなる姿勢で測定し、間接たわみ及びバックラッシを区別して同定する。
【先行技術文献】
【特許文献】
【0003】
特開2023-154527号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、近年の産業用ロボットは、軽量化を目的としてアルミニウム合金の素材を含むものがあり、作業プログラムの実行を繰り返すサイクル中に、熱膨張によってリンク長さ等が変化することがある。このようなサイクル中の要因に対応するためには、位置決め誤差の補正処理は、ティーチング中だけでなく、サイクル中にも実行できることが望ましい。
【0005】
しかしながら、特許文献1では、静止時の関節トルクが大きくなる姿勢で実測位置を測定する必要がある。このような姿勢の制限がある測定は、ティーチング中は可能であっても、サイクル中に実行できない。従って、サイクル中の要因には対応できず、サイクル中に位置決め誤差が増大する恐れがある。
【0006】
本発明は、前述した問題点に鑑みてなされたものであり、主要な目的は、作業プログラムの実行を繰り返すサイクル中に位置決め誤差を精度良く補正できるロボットシステムを提供することである。
【課題を解決するための手段】
【0007】
前述した目的を達成するための本発明は、ロボットと、前記ロボットの位置を計測するカメラと、前記ロボット及び前記カメラの動作を制御する制御装置と、を備えるロボットシステムであって、前記制御装置は、前記ロボットに関する誤差パラメータを含む同次変換行列を記憶する同次変換行列記憶部と、前記カメラによって計測され、異なる2つの時点における前記ロボットの少なくとも計測位置の差を含む第1データを生成する第1データ生成部と、前記同次変換行列に基づいて算出され、前記2つの時点における前記ロボットの少なくとも計算位置の差を含む第2データを生成する第2データ生成部と、前記第2データが、前記第1データに近くなるように前記誤差パラメータを補正する誤差パラメータ補正部と、を備えることを特徴とするロボットシステムである。
【0008】
前記誤差パラメータ補正部は、前記第1データを教師データとし、前記第2データを学習データとして、深層距離学習の学習手法を用いて前記誤差パラメータを学習するようにしても良い。
【0009】
また、前記誤差パラメータ補正部は、前記ロボットのリンク長さの誤差、リンクねじれ角の誤差、リンク間距離の誤差、間接たわみの抵抗力及びバックラッシの大きさを前記誤差パラメータとして学習するようにしても良い。
【発明の効果】
【0010】
本発明により、作業プログラムの実行を繰り返すサイクル中に位置決め誤差を精度良く補正できるロボットシステムを提供できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社不二越
X線測定システム
今日
個人
フラワーホッチキス。
1日前
川崎重工業株式会社
ハンド
5日前
トヨタ自動車株式会社
ロボット
8日前
工機ホールディングス株式会社
作業機
5日前
川崎重工業株式会社
塗装システム
5日前
トヨタ自動車株式会社
軌道生成装置
8日前
工機ホールディングス株式会社
作業機
5日前
川崎重工業株式会社
ワーク搬送ロボット
5日前
株式会社マキタ
回転打撃工具
8日前
山九株式会社
レンチ保持治具
8日前
東レエンジニアリング株式会社
ツール動作機構
7日前
川崎重工業株式会社
監視システム
6日前
NTN株式会社
リンク作動装置
8日前
株式会社ダイヘン
回生ユニット
6日前
パナソニック株式会社
工具及びカバー
5日前
NTN株式会社
ピッキング装置およびピッキング方法
7日前
ニデックインスツルメンツ株式会社
搬送システム
5日前
株式会社デンソー
作業装置および作業プログラム
7日前
セイコーエプソン株式会社
制御装置および制御方法
6日前
倉敷紡績株式会社
線状物保持ブロック、線状物保持治具および装置
1日前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
5日前
川崎重工業株式会社
ロボットの診断システム
6日前
マクセルイズミ株式会社
電動工具
6日前
株式会社ライズ電子
ロボットの制御方法
6日前
パナソニックIPマネジメント株式会社
吸着パッド
5日前
セイコーエプソン株式会社
プログラム、コンピューター
6日前
川崎重工業株式会社
ワーク搬送ロボットおよびロボット制御方法
5日前
株式会社アイシン
コンプライアンス装置
7日前
株式会社データロジック
印刷装置、印刷制御方法及び印刷処理プログラム
6日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
5日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
5日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
5日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
5日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
5日前
セイコーエプソン株式会社
ロボットおよびロボットシステム
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ