TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025147591
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024047916
出願日
2024-03-25
発明の名称
リンク作動装置
出願人
NTN株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250930BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ダイレクトティーチング時にも位置決め精度の向上を図ることができるリンク作動装置を提供する。
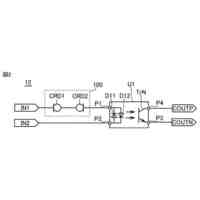
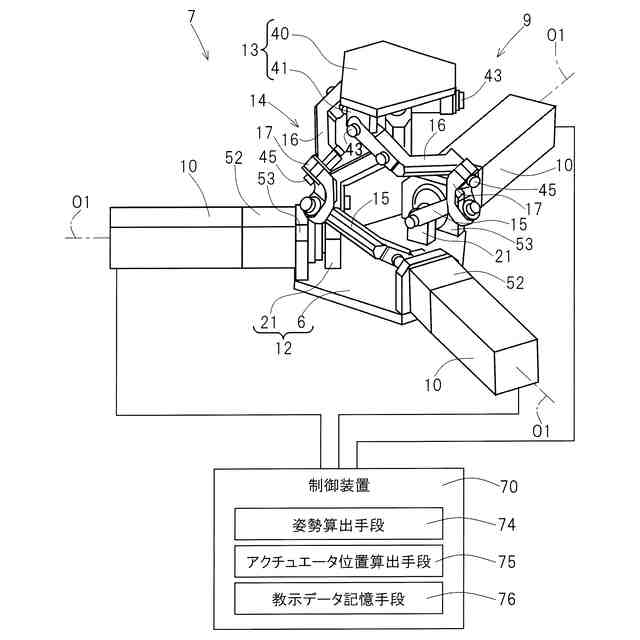
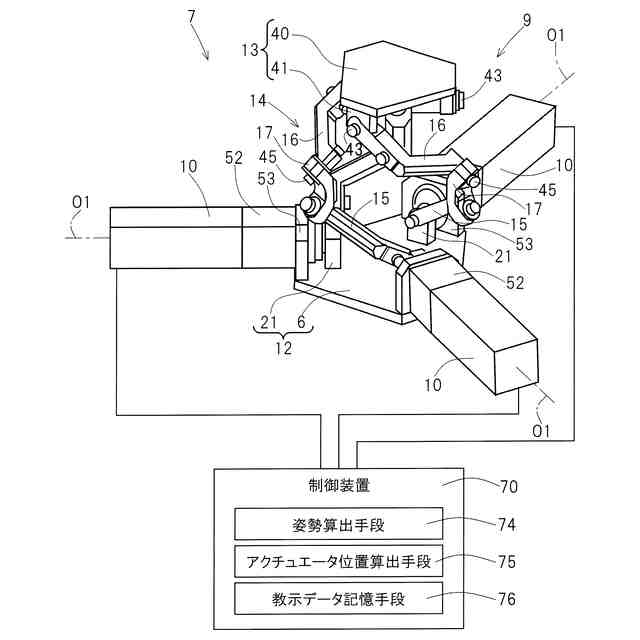
【解決手段】リンク作動装置7の制御装置70は、姿勢算出手段74と、アクチュエータ位置算出手段75と、教示データ記憶手段76とを有する。姿勢算出手段74は、先端側リンクハブ13の教示をダイレクトティーチングにより行うとき、パラレルリンク機構9に予圧を掛けていない状態で、アクチュエータ10の位置から順変換により先端側リンクハブ13の姿勢を算出する。アクチュエータ位置算出手段75は、先端側リンクハブ13の姿勢を基に、逆変換により、パラレルリンク機構9に予圧を掛けた状態のアクチュエータ10の位置を算出する。教示データ記憶手段76は、先端側リンクハブ13の姿勢と、逆変換により算出されたアクチュエータ10の位置とをセットで教示データとして記憶する。
【選択図】図1
特許請求の範囲
【請求項1】
基端側リンクハブに対し先端側リンクハブがリンク機構を介して姿勢変更可能に連結されるパラレルメカニズムと、前記先端側リンクハブの姿勢を変更させるアクチュエータと、このアクチュエータを制御する制御装置とを備えたリンク作動装置であって、
前記制御装置は、
前記先端側リンクハブの教示をダイレクトティーチングにより行うとき、前記パラレルメカニズムに予圧を掛けていない状態で、前記アクチュエータの位置から順変換により前記先端側リンクハブの姿勢を算出する姿勢算出手段と、
この算出された前記先端側リンクハブの姿勢を基に、逆変換により、前記パラレルメカニズムに予圧を掛けた状態の前記アクチュエータの位置を算出するアクチュエータ位置算出手段と、
前記先端側リンクハブの姿勢と、逆変換により算出された前記アクチュエータの位置とをセットで教示データとして記憶する教示データ記憶手段と、
を有するリンク作動装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載のリンク作動装置において、前記制御装置は、前記教示データ記憶手段に記憶された教示データに基づいて、前記アクチュエータを位置決め制御するリンク作動装置。
【請求項3】
請求項1または請求項2に記載のリンク作動装置において、前記パラレルメカニズムは、前記基端側リンクハブに対し前記先端側リンクハブを、3組以上の前記リンク機構を介して姿勢変更可能に連結し、
前記各リンク機構は、それぞれ前記基端側リンクハブおよび前記先端側リンクハブに一端が回転可能に連結された基端側および先端側の端部リンク部材と、これら基端側および先端側の端部リンク部材の他端に両端がそれぞれ回転可能に連結された中央リンク部材と、を有し、
前記3組以上の前記リンク機構のすべてに、前記アクチュエータを備えたリンク作動装置。
【請求項4】
請求項3に記載のリンク作動装置において、前記アクチュエータは、前記基端側リンクハブに設置されたモータであり、前記制御装置は、前記モータを駆動させ、前記先端側リンクハブの折れ角、旋回角の姿勢を制御可能とするリンク作動装置。
【請求項5】
請求項4に記載のリンク作動装置において、前記モータは、位置決め制御およびトルク制御が可能であるリンク作動装置。
【請求項6】
請求項4に記載のリンク作動装置において、前記制御装置は、前記先端側リンクハブの教示をダイレクトティーチングにより行うとき、前記モータの出力を制限するリンク作動装置。
【請求項7】
請求項1または請求項2に記載のリンク作動装置において、前記姿勢算出手段により順変換で算出された前記先端側リンクハブの姿勢は、前記先端側リンクハブの折れ角と旋回角であるリンク作動装置。
【請求項8】
請求項4に記載のリンク作動装置において、前記モータのトルクにより、前記パラレルメカニズムのガタを片側方向に寄せる力を付与することで、前記パラレルメカニズムに予圧を与えるリンク作動装置。
【請求項9】
請求項4に記載のリンク作動装置において、前記パラレルメカニズムのガタを片側方向に寄せる力は、前記パラレルメカニズムを定められた方向に圧縮させる方向の力であるリンク作動装置。
【請求項10】
請求項4に記載のリンク作動装置において、逆変換により算出された前記アクチュエータの位置である逆変換値は、前記モータの回転位置を検出するアブソリュート型エンコーダの出力値であり、予め前記パラレルメカニズムを片側方向に寄せる力を付与された前記先端側リンクハブの原点姿勢位置からの移動量を表すリンク作動装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、医療機器または産業機器等の精密で広範な作動域を必要とするリンク作動装置に関し、ダイレクトティーチングによる位置決め精度の向上を図る技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
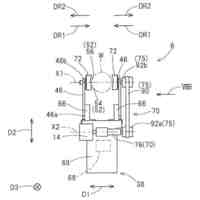
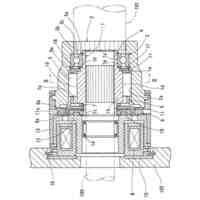
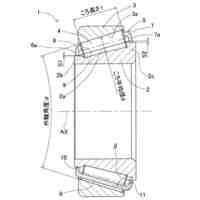
図1のように、パラレルメカニズムの一様態であるリンク作動装置7が提案されている。
【0003】
特許文献1では、リンク機構を有する機械体の位置決め精度向上のため、機械体の各回転対偶部または機構部などに生じるガタを片側方向に寄せようとする力(予圧)を付与した位置を、原点位置として設定する技術が提案されている。
【0004】
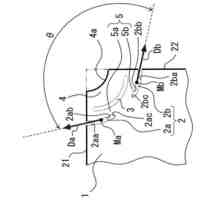
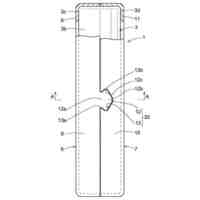
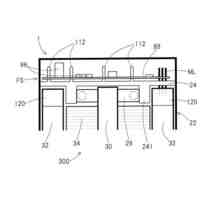
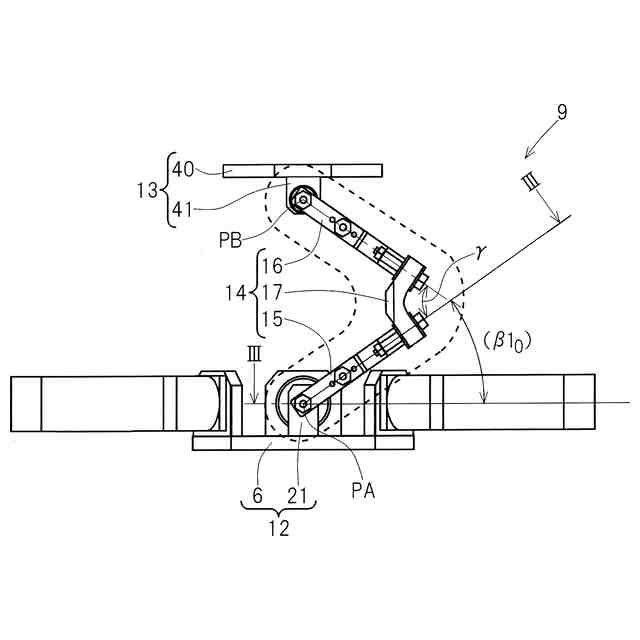
特許文献1の具体的な運用方法を説明する。図2のように、先端側リンクハブ13の姿勢が原点位置(θ
0
,φ
0
)にあり、この先端側リンクハブ13の姿勢に対応する基端側の端部リンク部材15の回転角度が(β1
0
,β2
0
,β3
0
)である時を考える。
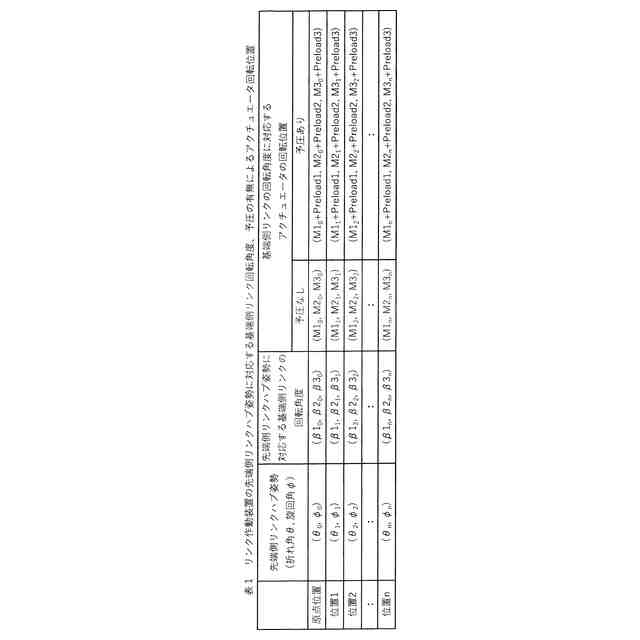
【0005】
このとき、表1のように、予圧なしの場合の基端側の端部リンク部材15の回転角度に対応するアクチュエータ回転位置(M1
0
,M2
0
,M3
0
)に対して、予圧分のオフセット量(Preload1,Preload2,Preload3)を加えた(M1
0
+Preload1,M2
0
+Preload2,M3
0
+Preload3)をアクチュエータ回転位置の原点位置として設定する。
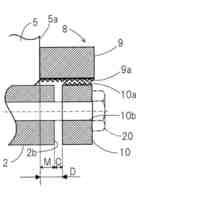
【0006】
TIFF
2025147591000002.tif
241
83
以降はこの原点位置を基準にして位置決め動作を行うことで、常に予圧分のオフセット量が加味されることとなる。結果として機械体のガタを片側方向に寄せて機械体の位置決め精度の向上を図ることが可能となる。
【先行技術文献】
【特許文献】
【0007】
特許第5951224号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、ダイレクトティーチング時に手動で機械体を移動させる場合には、アクチュエータの位置決め制御をOFF(ブレーキも解除)、あるいはトルク出力値を位置決め制御時よりも下げた設定でのトルク制御として、電気的、機械的な拘束を解く必要がある。この場合には予圧が消失し、予圧の消失した状態で取得したアクチュエータ回転位置(M1n,M2n,M3n)をそのまま教示データとして設定すると、機械体の位置決め精度は、予圧ありの場合に比べて悪化してしまう。
【0009】
本発明の目的は、ダイレクトティーチング時にも位置決め精度の向上を図ることができるリンク作動装置を提供することである。
【課題を解決するための手段】
【0010】
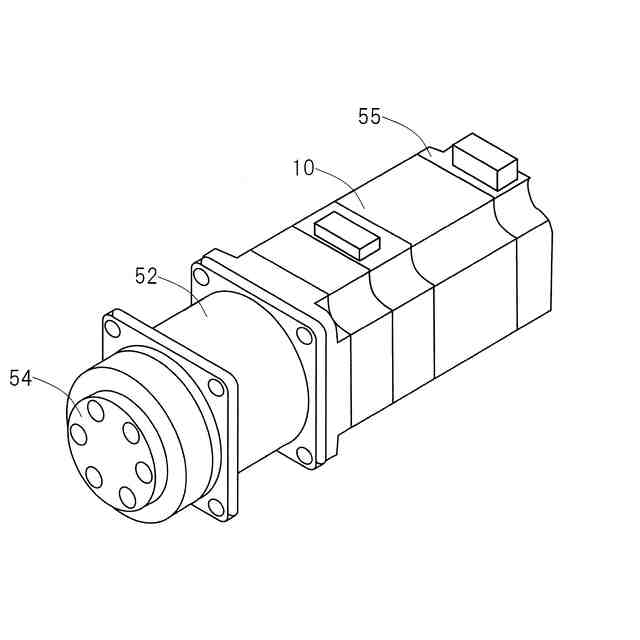
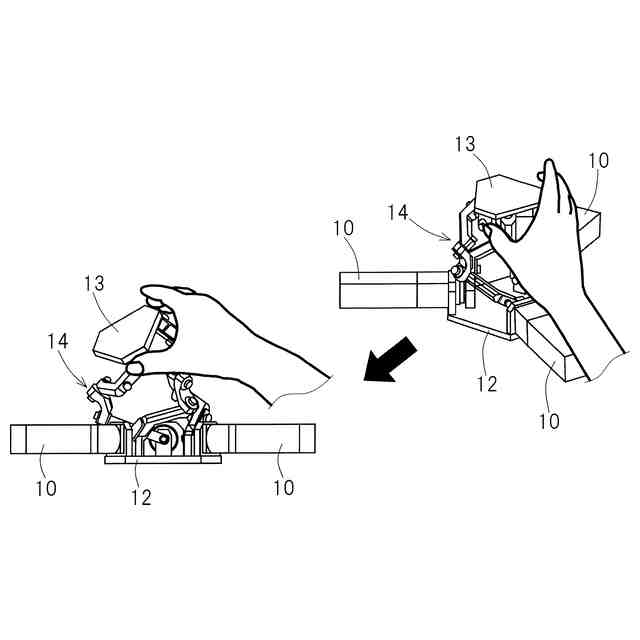
本発明のリンク作動装置は、基端側リンクハブ12に対し先端側リンクハブ13がリンク機構14を介して姿勢変更可能に連結されるパラレルメカニズム9と、前記先端側リンクハブ13の姿勢を変更させるアクチュエータ10と、このアクチュエータ10を制御する制御装置70とを備えたリンク作動装置であって、
前記制御装置70は、
前記先端側リンクハブ13の教示をダイレクトティーチングにより行うとき、前記パラレルメカニズム9に予圧を掛けていない状態で、前記アクチュエータ10の位置から順変換により前記先端側リンクハブ13の姿勢を算出する姿勢算出手段74と、
この算出された前記先端側リンクハブ13の姿勢を基に、逆変換により、前記パラレルメカニズム9に予圧を掛けた状態の前記アクチュエータ10の位置を算出するアクチュエータ位置算出手段75と、
前記先端側リンクハブ13の姿勢と、逆変換により算出された前記アクチュエータ10の位置とをセットで教示データとして記憶する教示データ記憶手段76と、
を有する。
前記「ダイレクトティーチング」は、先端側リンクハブ13を手動により教示位置まで移動させることを意味する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
NTN株式会社
基板
15日前
NTN株式会社
玉軸受
16日前
NTN株式会社
玉軸受
2日前
NTN株式会社
玉軸受
23日前
NTN株式会社
ハンド
10日前
NTN株式会社
玉軸受
24日前
NTN株式会社
作業装置
8日前
NTN株式会社
軸受装置
2日前
NTN株式会社
焼結軸受
2日前
NTN株式会社
把持装置
10日前
NTN株式会社
軸受装置
2日前
NTN株式会社
軸受装置
2日前
NTN株式会社
密封装置
8日前
NTN株式会社
把持装置
10日前
NTN株式会社
軸受装置
2日前
NTN株式会社
軸受装置
22日前
NTN株式会社
密封装置
1か月前
NTN株式会社
転がり軸受
1か月前
NTN株式会社
深溝玉軸受
1か月前
NTN株式会社
荷積込装置
3日前
NTN株式会社
転がり軸受
3日前
NTN株式会社
転がり軸受
16日前
NTN株式会社
転がり軸受
2日前
NTN株式会社
転がり軸受
10日前
NTN株式会社
回転伝達装置
8日前
NTN株式会社
シール付軸受
8日前
NTN株式会社
軸受用保持器
1か月前
NTN株式会社
等速自在継手
22日前
NTN株式会社
基板取付構造
22日前
NTN株式会社
状態監視装置
9日前
NTN株式会社
回転伝達装置
3日前
NTN株式会社
回転伝達装置
3日前
NTN株式会社
円筒ころ軸受
24日前
NTN株式会社
球面滑り軸受
1か月前
NTN株式会社
車輪用軸受装置
1か月前
NTN株式会社
円すいころ軸受
15日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ