TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025149162
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049638
出願日
2024-03-26
発明の名称
ピッキング装置およびピッキング方法
出願人
NTN株式会社
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20251001BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】制御システムが単純で高いスキルを必要とせず、調整時間が短くて済み、ワークが鉛直軸に対して傾斜していても、安定してワークを把持できて、ピッキング動作が安定するピッキング装置およびピッキング方法を提供する。
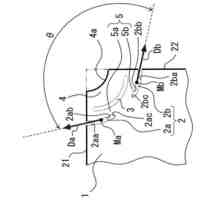
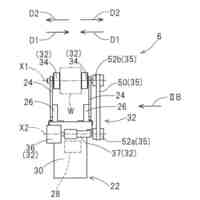
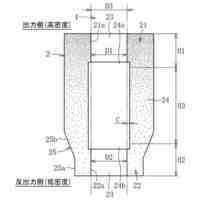
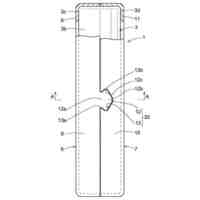
【解決手段】ワークは、大径部と小径部とを有し、大径部の軸心線と小径部の軸心線とが同一軸線上に配設されてなる。ワークが、大径側を下方側とするともに小径部が上方側とされてワーク載置面に載置された状態でワークの上方位置からワークを撮像する。撮像工程にて撮像された画像から、大径部の中心位置から小径部の中心位置の中心ズレ量と、ワークの傾き方向を検出する。予め測定されて既知となった小径部の大径部からの突出量と、中心ズレ量に基づいて、ワークの鉛直軸に対する傾斜角度を算出する。検出工程にて検出したワークの傾き方向および演算工程にて算出した傾斜角度に基づいて、ワーク把持部の傾斜角度及び傾き方向を決定してワーク把持部によるワークの把持する制御を行う。
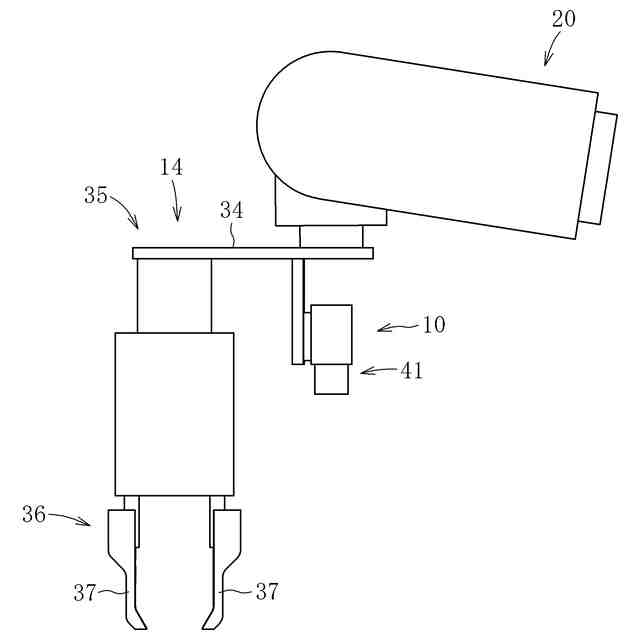
【選択図】図1
特許請求の範囲
【請求項1】
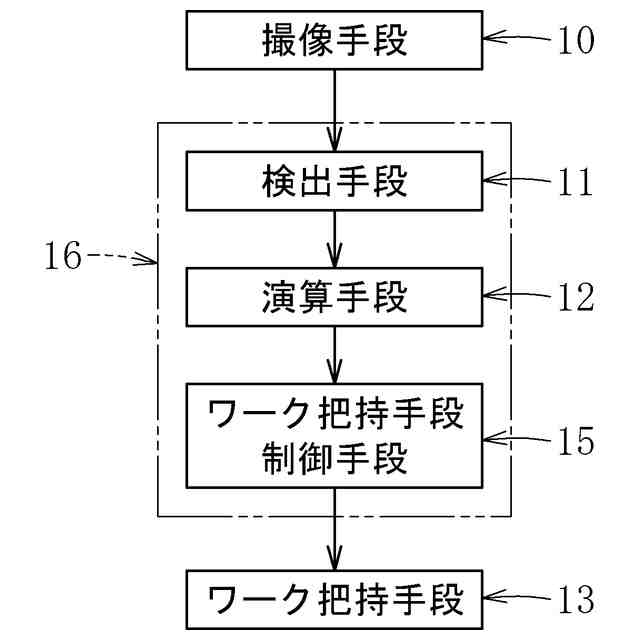
大径部と小径部とを有し、大径部の軸心と小径部の軸心が同じワークをワーク把持手段にて把持してピッキングするピッキング装置であって、
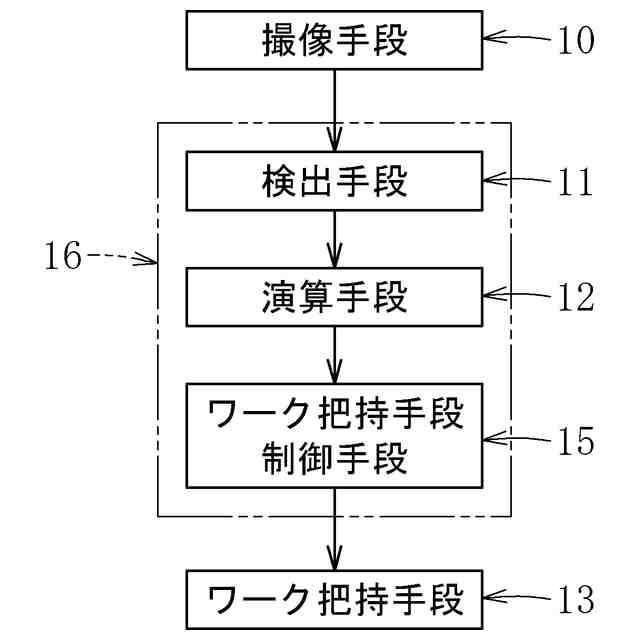
前記ワークがワーク載置面に載置された状態で前記ワークの上方位置から前記ワークを撮像する撮像手段と、
前記撮像手段にて撮像された画像から、大径部の中心位置から小径部の中心位置の中心ズレ量と、ワークの傾き方向を検出する検出手段と、
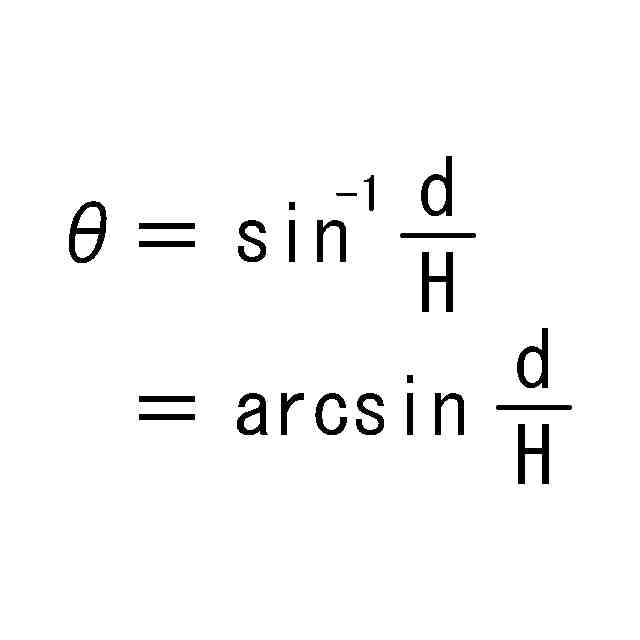
予め測定されて既知となった小径部の大径部からの突出量と、前記中心ズレ量に基づいて、ワークの鉛直軸に対する傾斜角度を算出する演算手段と、
前記検出手段にて検出したワークの傾き方向および前記演算手段にて算出した傾斜角度に基づいて、前記ワーク把持手段のワーク把持部の傾斜角度及び傾き方向を決定して前記ワーク把持手段の把持制御を行うワーク把持制御手段とを備えたことを特徴とするピッキング装置。
続きを表示(約 1,000 文字)
【請求項2】
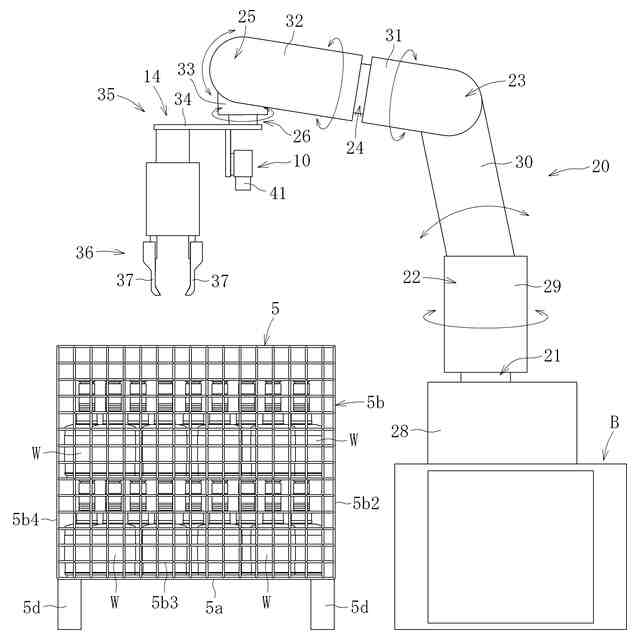
前記把持手段は、多関節ロボットを備え、前記多関節ロボットのワーク把持部を構成するロボットハンドに前記撮像手段が設置されていることを特徴とする請求項1に記載のピッキング装置。
【請求項3】
前記撮像手段は、カメラであり、カメラのレンズにテレセントリックレンズを用いたことを特徴とする請求項1に記載のピッキング装置。
【請求項4】
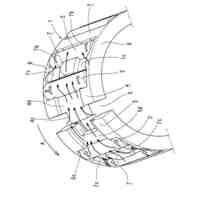
前記ワークは、マウス部とマウス部の底壁から突設されるステム部とを備えた等速自在継手の外側継手部材であり、前記マウス部が前記大径部を構成し、前記ステム部が前記小径部を構成することを特徴とする請求項1~請求項3のいずれか1項に記載のピッキング装置。
【請求項5】
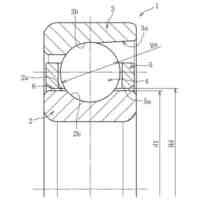
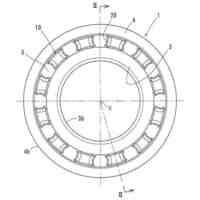
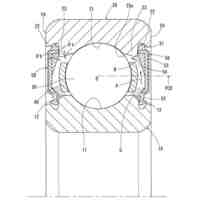
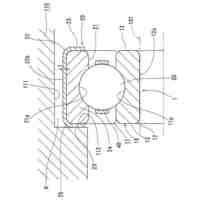
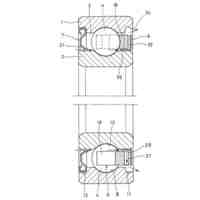
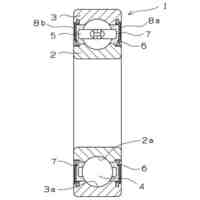
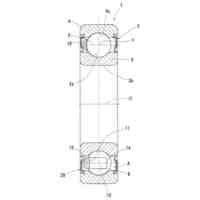
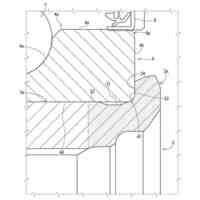
前記ワークが、内周に外側軌道面を有する外方部材と、外周に内側軌道面を有する内方部材と、前記外方部材と前記内方部材との両軌道面間に転動自在に収容された複列の転動体とを備えたハブベアリングであり、前記内方部材に設けられる車輪取付フランジが、前記大径部を構成し、前記外方部材が、前記小径部を構成することを特徴とする請求項1~請求項3のいずれか1項に記載のピッキング装置。
【請求項6】
大径部と小径部とを有し、大径部の軸心と小径部の軸心が同じワークをワーク把持部にて把持してピッキングするピッキング方法であって、
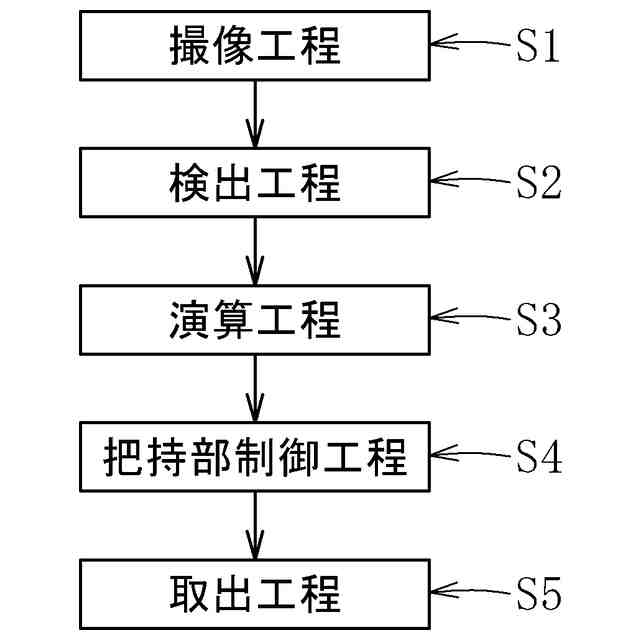
前記ワークがワーク載置面に載置された状態で前記ワークの上方位置から前記ワークを撮像する撮像工程と、
前記撮像工程にて撮像された画像から、前記大径部の中心位置から小径部の中心位置の中心ズレ量と、ワークの傾き方向を検出する検出工程と、
予め測定されて既知となった小径部の大径部からの突出量と、前記中心ズレ量に基づいて、ワークの鉛直軸に対する傾斜角度を算出する演算工程と、
前記検出工程にて検出したワークの傾き方向および前記演算工程にて算出した傾斜角度に基づいて、前記ワーク把持部の傾斜角度及び傾き方向を決定して前記ワーク把持部の把持制御を行う把持制御工程とを備えたことを特徴とするピッキング方法。
【請求項7】
把持制御工程にて把持したワークを、ワーク載置面に載置された状態から取り出し、他の部位へ搬送する取出工程をさらに備えることを特徴とする請求項6に記載のピッキング方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ピッキング装置およびピッキング方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
ワークを把持して、その把持したワークを所定の位置に移載する場合、一般にピッキング装置と呼ばれる装置で行われる場合が多く、このピッキング装置は、従来からロボットが用いられている。
【0003】
ところで、このようなピッキング装置では、ロボットハンドにて、ワークを挟持して、ワークの位置の位置決めを行うようにするピッキング方法がある(特許文献1)。この場合、把持装置によりワーク上面でワークを把持し、サイドガイドにより把持装置を水平移動してワークをアライメント位置に位置決めすることにより、把持位置のワークに位置ずれ(初期位置誤差)があっても、ワークのアライメント(位置決め)ができるものである。
【0004】
バラ積みワーク(バラバラの状態で積まれているワーク)をピッキングする場合がある。このため、従来には、バラ積み状態のワークであっても、把持部がワークを把持する成功率を高めることができ、ピッキング装置の稼働率を高めるとともに、作業のタクトタイムを向上させることが可能な装置(画像処理装置)が提案されている(特許文献2)。
【0005】
特許文献2に記載のものは、事前に登録された位置での把持の成否に関する統計データに基づいて、3Dピッキングにおけるマニピュレータ(多関節構造とサーボモーターによって動作するロボット本体)によるピッキング動作を制御するものである。
【先行技術文献】
【特許文献】
【0006】
特開2010-012581号公報
特開2018-179859号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
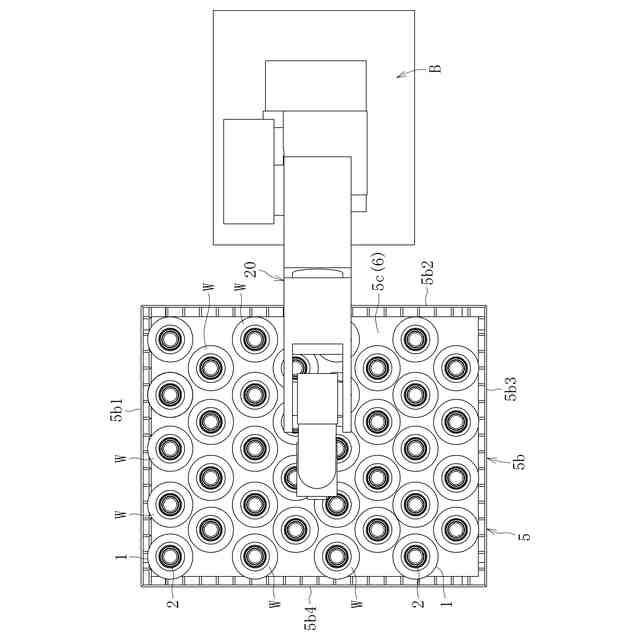
ところで、ワークが、その外径面に大径部と小径部とを有し、大径部の軸心線と小径部の軸心線とが同一軸線上に配設されたもの、例えば、ハブベアリング(ハブユニット)や等速自在継手の外側継手部材等)では、ワーク搬送時にワークを安定させるために、大径側を下方に向けて載置面(例えば、金属でできた網状の板を組み合わせて箱型にしたパレット)の底面に載置される。なお、このようなパレットは、メッシュボックスやパレテーナとも呼ばれている。
【0008】
そこで、このような状態のワークをピッキングする場合、例えば、ビジョンシステム(
位置検出や検査のために産業用ロボットに取りつけるカメラシステム)によりワーク位置座標を算出し、ロボットハンドの位置にフィードバックすることで、上方となっているステム部(軸部)を把持してパレットから取り出すことになる。
【0009】
しかしながら、ワークを収納しているパレットのワーク載置面(底面)に歪や傾斜がある場合、さらには、ワークへの傷付き防止のためにクッション材を敷設しているものであって、クッション材に撓みが生じている場合等においては、ワークが鉛直軸に対して傾斜することになる。このような場合には、ワークをロボットハンドで把持できなかったり、把持できても安定して把持できていなかったりするおそれがあった。
【0010】
このように、ワークがパレットに収納され、かつワークが鉛直軸に対して傾斜している場合において、特許文献1に記載のロボットハンドを用いて、ピッキングしようとしたとしても、この特許文献1に記載のロボットハンドは大型化しており、パレットのコーナ部のワークをこのロボットハンドでは把持しにくくなっている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
NTN株式会社
基板
13日前
NTN株式会社
玉軸受
22日前
NTN株式会社
玉軸受
21日前
NTN株式会社
玉軸受
今日
NTN株式会社
玉軸受
14日前
NTN株式会社
ハンド
8日前
NTN株式会社
把持装置
8日前
NTN株式会社
作業装置
6日前
NTN株式会社
密封装置
6日前
NTN株式会社
軸受装置
20日前
NTN株式会社
軸受装置
今日
NTN株式会社
軸受装置
今日
NTN株式会社
把持装置
8日前
NTN株式会社
焼結軸受
今日
NTN株式会社
軸受装置
今日
NTN株式会社
軸受装置
今日
NTN株式会社
荷積込装置
1日前
NTN株式会社
転がり軸受
今日
NTN株式会社
転がり軸受
1日前
NTN株式会社
転がり軸受
14日前
NTN株式会社
転がり軸受
8日前
NTN株式会社
軸受用保持器
1か月前
NTN株式会社
回転伝達装置
6日前
NTN株式会社
シール付軸受
6日前
NTN株式会社
等速自在継手
20日前
NTN株式会社
状態監視装置
7日前
NTN株式会社
基板取付構造
20日前
NTN株式会社
回転伝達装置
1日前
NTN株式会社
回転伝達装置
1日前
NTN株式会社
円筒ころ軸受
22日前
NTN株式会社
モータユニット
10日前
NTN株式会社
円すいころ軸受
13日前
NTN株式会社
車輪用軸受装置
22日前
NTN株式会社
電動モータ装置
22日前
NTN株式会社
保持器付きころ
10日前
NTN株式会社
車輪用軸受装置
6日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ