TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025153400
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055873
出願日
2024-03-29
発明の名称
搬送システム
出願人
ニデックインスツルメンツ株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】移動機のフレッチングの発生を抑制する。
【解決手段】搬送システム100は、基板Wを第1載置部200から第2載置部300に搬送するための搬送ロボットと、Y軸方向に搬送ロボットを移動させる移動機構3と、制御部と、を備える。移動機構3は、レール部31、搬送ロボットが固定されるとともに無限循環する多数のボールを介してレール部31に組み付けられたブロック、およびブロックを移動させるブロック駆動部33を備える。制御部は、基板Wを第1載置部200から第2載置部300に搬送する前の設定段階において、ブロック駆動部33を駆動して、ブロックを設定された停止位置に位置させ、基板Wを第1載置部200から第2載置部300に搬送する作業段階において、搬送ロボットの動作状況に応じて、ブロック駆動部33を駆動して、停止位置から所定距離だけ離れた位置との間でブロックを往復移動させる。
【選択図】図1
特許請求の範囲
【請求項1】
ワークを第1載置部から第2載置部に搬送する搬送システムにおいて、
前記ワークが保持されるハンドを水平方向に沿った第1方向に移動させるロボットアーム、前記ロボットアームを上下方向に沿った第2方向に移動させる第1駆動機構、および前記第2方向に沿った回転軸を中心に前記第1駆動機構を回転させる第2駆動機構を備えた搬送ロボットと、
水平方向に沿うととともに第1方向と直交する第3方向に前記搬送ロボットを移動させる移動機構であって、第3方向に延びるレール部、前記搬送ロボットが固定されるとともに無限循環する多数の転動体を介して前記レール部に組み付けられたブロック、および前記ブロックを前記第3方向に移動させるブロック駆動部を備える移動機構と、
前記ロボットアーム、前記第1駆動機構、前記第2駆動機構および前記移動機構を制御する制御部と、
を備え、
前記制御部は、
前記ワークを前記第1載置部から前記第2載置部に搬送する前の設定段階において、前記ブロック駆動部を駆動して、前記ブロックを設定された停止位置に位置させ、
前記ワークを前記第1載置部から前記第2載置部に搬送する作業段階において、前記搬送ロボットの動作状況に応じて、前記ブロック駆動部を駆動して、前記停止位置から所定距離だけ離れた位置との間で前記ブロックを往復移動させる第1動作を実行することを特徴とする搬送システム。
続きを表示(約 770 文字)
【請求項2】
前記制御部は、前記ワークを前記第1載置部から前記第2載置部に搬送する作業段階において、前記搬送ロボットの動作が停止している状況で、前記第1動作を実行することを特徴とする請求項1に記載の搬送システム。
【請求項3】
前記ロボットアームは、前記ハンドが先端部に連結されたアーム部と、前記ハンドを第1方向に移動させるために前記アームを伸縮させるアーム駆動部と、を備え、
前記制御部は、前記アーム駆動部を駆動して、前記アーム部が縮んだ第1位置、前記アーム部が伸びた第2位置、前記アーム部が縮んだ前記第1位置、の順に前記アーム部を動作させるアーム動作を行うことが可能であり、
前記制御部は、前記ワークを前記第1載置部から前記第2載置部に搬送する作業段階において、前記第1載置部に載置された前記ワークを前記ハンドに載置させるための前記アーム動作、および、前記ハンドに載置された前記ワークを前記第2載置部に載置させるための前記アーム動作の少なくとも一方の動作の後に、前記第1動作を実行することを特徴とする請求項1に記載の搬送システム。
【請求項4】
前記制御部は、前記ワークを前記第1載置部から前記第2載置部に搬送する作業段階において、前記第1載置部に載置された前記ワークを前記ハンドに載置させるための前記アーム動作、および、前記ハンドに載置された前記ワークを前記第2載置部に載置させるための前記アーム動作の何れか一方の動作の後に、前記第1動作を1回実行することを特徴とする請求項3に記載の搬送システム。
【請求項5】
前記転動体の直径をD、前記所定距離をLとすると、
L=πD
を満たすことを特徴とする請求項1から3のうち何れか一項に記載の搬送システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送システムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
ガラス基板などを搬送する搬送システムは、特許文献1に記載されている。同文献の搬送システムは、水平方向に沿った第1方向にハンドを移動させるロボットアームと、ロボットアームを上下方向に沿った第2方向に移動させるとともに上下方向に沿った回転軸を中心にロボットアームを回転させる駆動機構と、水平方向に沿うとともに第1方向と直交する第3方向である移動方向にロボットアームを移動させる移動機構と、を備えている。移動機構は、第3方向に伸びるレールと、レール沿って移動可能に支持された台盤と、台盤をレールに沿って移動させる駆動部と、を備える。
【先行技術文献】
【特許文献】
【0003】
特開平07-263518号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のような搬送システムで用いられる移動機構は、第3方向に延びるレール、無限循環する多数の転動体を介してレールに組み付けられたベース、およびベースを3方向に移動させるベース駆動部を備える場合がある。この場合、ベースには、駆動機構が固定される。ベースが第3方向に移動することにより、駆動機構を介してロボットアームが第3方向に移動する。
【0005】
ここで、特許文献1のような搬送システムでは、ロボットアームの第3方向の位置を所定位置に設定した状態で、ロボットアームおよび駆動機構を動作させて、ガラス基板を搬送する場合がある。すなわち、ガラス基板を搬送する際には、移動機構を動作させずベースを所定位置に停止させた状態で、ロボットアームおよび駆動機構を動作させる使用状況がある。このような使用状況では、ロボットアームおよび駆動機構が動作する際の振動やベースをアライメントするための微小動作が、ベースを介して転動体に伝わることによって、転動体とレールおよびベースとの接触面からグリスなどの潤滑剤が排除され、転動体とレールおよびベースとの接触面にフレッチングが発生する場合がある。
【0006】
以上の問題点に鑑みて、本発明の課題は、ロボットアームを水平方向に沿って伸びる移動方向に移動させることが可能な移動機構を備えた搬送システムにおいて、ロボットアームを使用する際に、ロボットアームの移動方向の位置を所定位置に設定した状態であっても、移動機構にフレッチングが発生することを抑制することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の搬送システムは、ワークを第1載置部から第2載置部に搬送する搬送システムにおいて、前記ワークが保持されるハンドを水平方向に沿った第1方向に移動させるロボットアーム、前記ロボットアームを上下方向に沿った第2方向に移動させる第1駆動機構、および前記第2方向に沿った回転軸を中心に前記第1駆動機構を回転させる第2駆動機構を備えた搬送ロボットと、水平方向に沿うととともに第1方向と直交する第3方向に前記搬送ロボットを移動させる移動機構であって、第3方向に延びるレール部、前記搬送ロボットが固定されるとともに無限循環する多数の転動体を介して前記レール部に組み付けられたブロック、および前記ブロックを前記第3方向に移動さ
せるブロック駆動部を備える移動機構と、前記ロボットアーム、前記第1駆動機構、前記第2駆動機構および前記移動機構を制御する制御部と、を備え、前記制御部は、前記ワークを前記第1載置部から前記第2載置部に搬送する前の設定段階において、前記ブロック駆動部を駆動して、前記ブロックを設定された停止位置に位置させ、前記ワークを前記第1載置部から前記第2載置部に搬送する作業段階において、前記搬送ロボットの動作状況に応じて、前記ブロック駆動部を駆動して、前記停止位置から所定距離だけ離れた位置との間で前記ブロックを往復移動させる第1動作を実行することを特徴とする。
【図面の簡単な説明】
【0008】
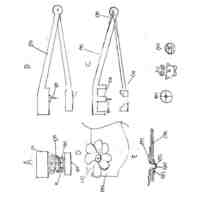
図1は、搬送システムの平面図である。
図2は、図1に示す搬送システムの側面図である。
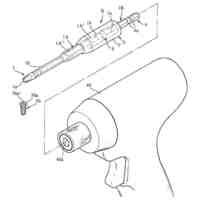
図3は、移動機構の平面図である。
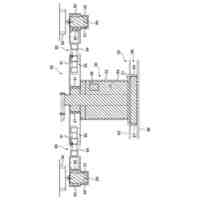
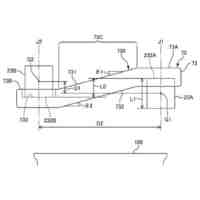
図4は、レール部とブロックとの関係を説明する図である。
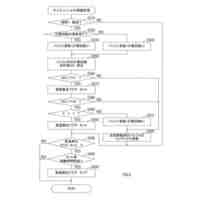
図5は、搬送システムのブロック図である。
【発明を実施するための形態】
【0009】
図面を参照して、本発明の実施の形態を説明する。以下の説明では、搬送対象物としてのワークが、液晶ディスプレイ用のガラス基板(以下、「基板」とする。)である場合を中心に説明する。基板Wは、矩形の平板状である。図1は、搬送システムの平面図である。図2は、図1に示す搬送システムの側面図である。図3は、移動機構の平面図である。図4は、レール部とブロックとの関係を説明する図である。図5は、搬送システムのブロック図である。
【0010】
(搬送システムの全体構成)
本形態の搬送システム100は、液晶ディスプレイの製造ラインに組み込まれて使用される。図1に示すように、搬送システム100は、ガラス製の基板Wを第1載置部200から第2載置部300に搬送する。以下の説明では、便宜上、互いに直交する3軸をX軸、Y軸、およびZ軸とする。Z軸方向(第2方向)は、上下方向に沿った方向である。X軸方向(第1方向)およびY軸方向(第3方向)は、水平方向に沿った方向である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
折りたたみ工具
1か月前
個人
フラワーホッチキス。
4日前
株式会社三協システム
製函機
1か月前
川崎重工業株式会社
ロボット
17日前
株式会社三協システム
移載装置
1か月前
株式会社竹中工務店
補助セット
16日前
株式会社不二越
ロボット
16日前
CKD株式会社
把持装置
1か月前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
ハンド
8日前
株式会社不二越
ロボット操作装置
1か月前
株式会社ミクロブ
把持装置
1か月前
SMC株式会社
着脱装置
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
工機ホールディングス株式会社
作業機
8日前
株式会社不二越
移動ロボットシステム
19日前
トヨタ自動車株式会社
ロボット
11日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
塗装システム
8日前
本田技研工業株式会社
装置
22日前
株式会社不二越
エッジ仕上げ装置
29日前
株式会社不二越
垂直多関節ロボット
1か月前
トヨタ自動車株式会社
歩行ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
11日前
シンフォニアテクノロジー株式会社
搬送装置
19日前
ライオン株式会社
移載システム
1か月前
大和ハウス工業株式会社
ねじ回転工具
1か月前
アネックスツール株式会社
ドライバービット
15日前
工機ホールディングス株式会社
作業機
8日前
株式会社マキタ
回転打撃工具
11日前
株式会社不二越
ロボットに用いる伝送路
1日前
ワールド技研株式会社
ロボットセル装置
16日前
川崎重工業株式会社
ワーク搬送ロボット
8日前
シヤチハタ株式会社
マーキング装置
1か月前
セイコーエプソン株式会社
ロボット
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ