TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025151132
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024052397
出願日
2024-03-27
発明の名称
制御装置および制御方法
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームの動作を正確に行うことができ、作業精度の向上および安全性の向上を図ることができる制御装置および制御方法を提供すること。
【解決手段】複数のツールのうち、ロボットアームの先端部に装着されたツールに関する第1情報を取得する取得部と、取得部が取得した第1情報と、予め設定された前記ツールに関する第2情報とが一致しているか否かの合否判断を行う判断部と、判断部が第1情報と第2情報とが一致していると判断した場合、ロボットアームの動作を開始するようロボットアームの駆動を制御する駆動制御部と、判断部が第1情報と第2情報とが一致していないと判断した場合、エラーである旨を報知する報知信号生成部と、を備えることを特徴とする制御装置。
【選択図】図2
特許請求の範囲
【請求項1】
複数のツールのうち、ロボットアームの先端部に装着された前記ツールに関する第1情報を取得する取得部と、
前記取得部が取得した前記第1情報と、予め設定された前記ツールに関する第2情報とが一致しているか否かの合否判断を行う判断部と、
前記判断部が前記第1情報と前記第2情報とが一致していると判断した場合、前記ロボットアームの動作を開始するよう前記ロボットアームの駆動を制御する駆動制御部と、
前記判断部が前記第1情報と前記第2情報とが一致していないと判断した場合、エラーである旨を報知する報知信号生成部と、を備えることを特徴とする制御装置。
続きを表示(約 930 文字)
【請求項2】
前記第1情報および前記第2情報は、それぞれ、前記ツール毎に設定される座標系の原点の位置情報を含む請求項1に記載の制御装置。
【請求項3】
前記判断部は、動作プログラムにおける前記ロボットアームの位置情報であるポイント毎に前記合否判断を行う請求項2に記載の制御装置。
【請求項4】
前記ロボットアームが実行する前記動作プログラムに含まれる単位動作プログラム毎に前記合否判断を行う請求項2に記載の制御装置。
【請求項5】
前記ツール毎に設定される前記座標系の前記原点は、前記ロボットアームの前記先端部から偏心した位置である請求項2に記載の制御装置。
【請求項6】
前記第1情報および前記第2情報は、前記ツールの種類に関する情報を含む請求項1ないし4のいずれか1項に記載の制御装置。
【請求項7】
前記判断部による前記合否判断を行うか否かを選択するための選択部を有する請求項1に記載の制御装置。
【請求項8】
複数の単位動作プログラムに一括して、または、前記単位動作プログラム毎に前記合否判断を行うかを設定可能であり、
前記複数の単位動作プログラムに一括して行った設定と、前記単位動作プログラム毎に行った設定とが重複した場合、前記単位動作プログラム毎に行った設定が優先される請求項2に記載の制御装置。
【請求項9】
複数のツールのうち、ロボットアームの先端部に装着された前記ツールに関する第1情報を取得する取得ステップと、
前記取得ステップで取得した前記第1情報と、予め設定された前記ツールに関する第2情報とが一致しているか否かを判断する判断ステップと、を有し、
前記判断ステップにおいて、前記第1情報と前記第2情報とが一致していると判断した場合、前記ロボットアームの動作を開始するよう前記ロボットアームの駆動を制御する駆動ステップを実行し、
前記判断ステップにおいて、前記第1情報と前記第2情報とが一致していないと判断した場合、エラーである旨を報知する報知ステップを実行することを特徴とする制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置および制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年では、作業の効率化、均一化を図るために、例えば、特許文献1に示すような、ロボットアームを有するロボットによって製造、加工、組み立て等の作業が行われている。このようなロボットでは、例えば、ロボットアームが障害物に不本意に接触しないように、各種工夫がなされている。例えば、特許文献1に記載されているロボットでは、ロボットの周囲に、ロボットアームの進入を禁止する動作禁止領域を設定し、動作禁止領域にロボットアームが侵入しないように駆動することにより、ロボットアームの障害物との不本意な接触を防止している。
【先行技術文献】
【特許文献】
【0003】
特開平1-16395号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されているロボットでは、動作禁止領域を設定したとしてもロボットを動かす際などに、ロボットアームの先端部に装着されたツールの種類、形状や、ツールに設定された制御点の位置等の設定を作業者が間違えるかまたは設定が不適切であると、ツールが動作禁止領域に侵入するおそれが生じ、これが原因でロボットアームの障害物との不本意な接触が発生することがある。従来では、このような設定の間違いや不適切な設定を防止することに関して、十分な工夫がなされていなかった。
【課題を解決するための手段】
【0005】
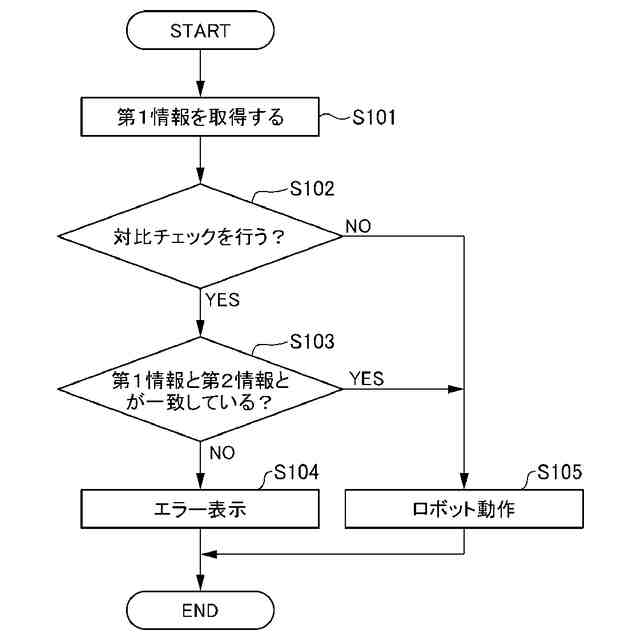
本発明の制御装置は、複数のツールのうち、ロボットアームの先端部に装着された前記ツールに関する第1情報を取得する取得部と、
前記取得部が取得した前記第1情報と、予め設定された前記ツールに関する第2情報とが一致しているか否かの合否判断を行う判断部と、
前記判断部が前記第1情報と前記第2情報とが一致していると判断した場合、前記ロボットアームの動作を開始するよう前記ロボットアームの駆動を制御する駆動制御部と、
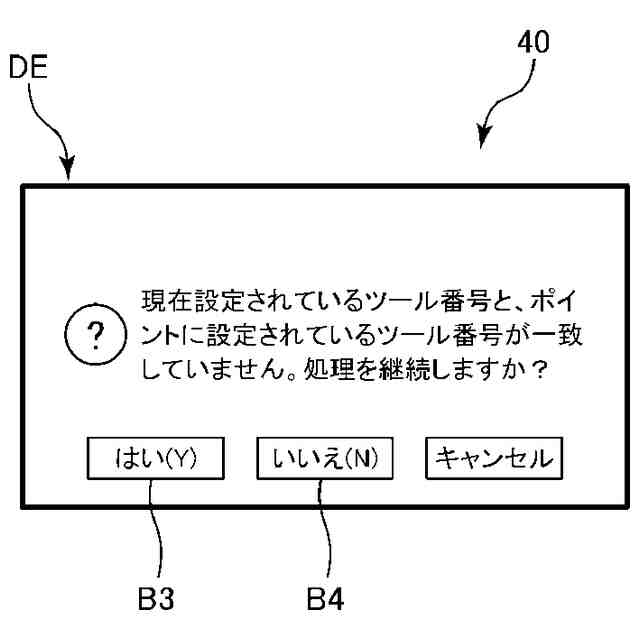
前記判断部が前記第1情報と前記第2情報とが一致していないと判断した場合、エラーである旨を報知する報知信号生成部と、を備える。
【0006】
本発明の制御方法は、複数のツールのうち、ロボットアームの先端部に装着された前記ツールに関する第1情報を取得する取得ステップと、
前記取得ステップで取得した前記第1情報と、予め設定された前記ツールに関する第2情報とが一致しているか否かを判断する判断ステップと、を有し、
前記判断ステップにおいて、前記第1情報と前記第2情報とが一致していると判断した場合、前記ロボットアームの動作を開始するよう前記ロボットアームの駆動を制御する駆動ステップを実行し、
前記判断ステップにおいて、前記第1情報と前記第2情報とが一致していないと判断した場合、エラーである旨を報知する報知ステップを実行する。
【図面の簡単な説明】
【0007】
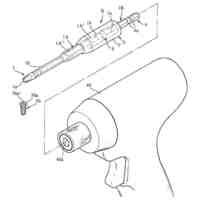
図1は、本発明の制御装置の第1実施形態を備えるロボットシステムの全体構成を示す図である。
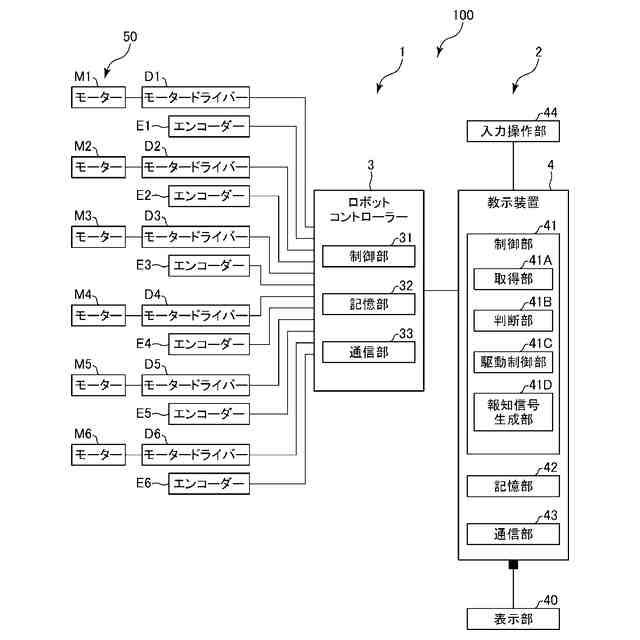
図2は、図1に示すロボットシステムのブロック図である。
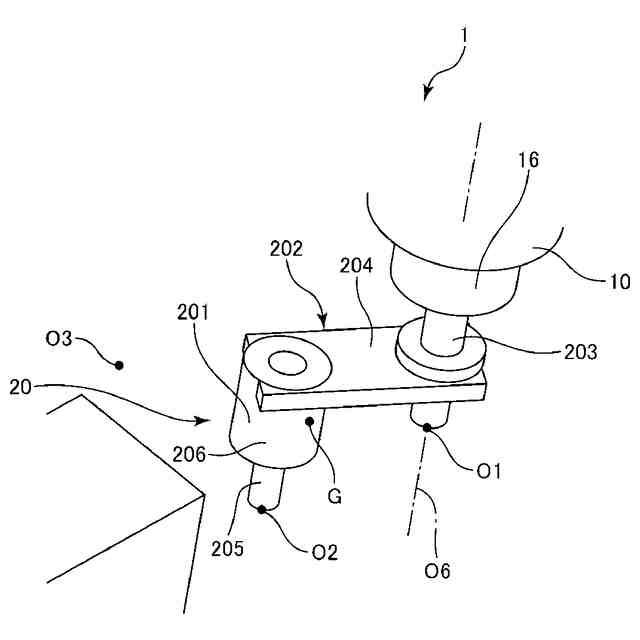
図3は、ロボットアームに装着されるツールの斜視図である。
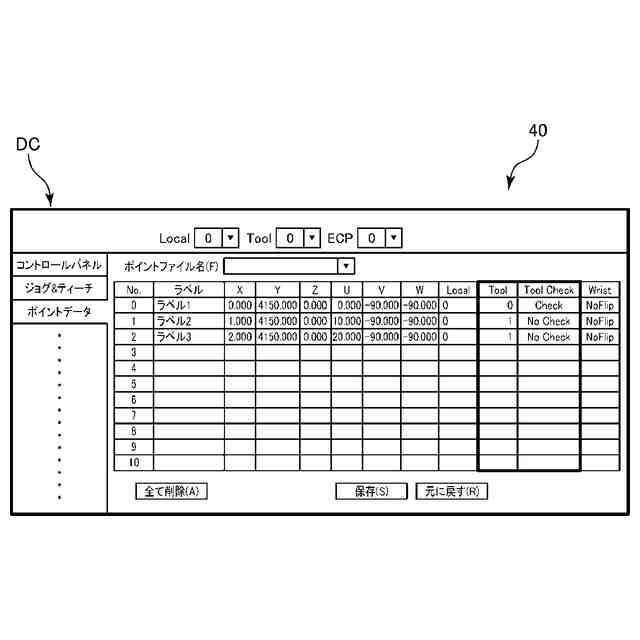
図4は、教示画面の一例を示す図である。
図5は、確認画面の一例を示す図である。
図6は、確認画面の一例を示す図である。
図7は、実行画面の一例を示す図である。
図8は、報知画面の一例を示す図である。
図9は、本発明の制御方法の一例を説明するためのフローチャートである。
図10は、本発明の制御装置の第2実施形態におけるプログラム作成画面の一例を示す図である。
図11は、本発明の制御装置の第2実施形態におけるプログラム作成画面の一例を示す図である。
【発明を実施するための形態】
【0008】
以下、本発明の制御装置および制御方法を添付図面に示す好適な実施形態に基づいて詳細に説明する。
【0009】
<第1実施形態>
図1は、本発明の制御装置の第1実施形態を備えるロボットシステムの全体構成を示す図である。図2は、図1に示すロボットシステムのブロック図である。図3は、ロボットアームに装着されるツールの斜視図である。図4は、教示画面の一例を示す図である。図5は、確認画面の一例を示す図である。図6は、確認画面の一例を示す図である。図7は、実行画面の一例を示す図である。図8は、報知画面の一例を示す図である。図9は、本発明の制御方法の一例を説明するためのフローチャートである。
【0010】
なお、以下では、説明の便宜上、ロボットアーム10については、図1中の基台11側を「基端」、その反対側、すなわち、ツール20側を「先端」とも言う。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
1か月前
川崎重工業株式会社
ロボット
10日前
株式会社三協システム
製函機
1か月前
株式会社不二越
ロボット
9日前
株式会社三協システム
移載装置
1か月前
CKD株式会社
把持装置
1か月前
株式会社竹中工務店
補助セット
9日前
川崎重工業株式会社
ハンド
1日前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
ロボットシステム
1か月前
SMC株式会社
着脱装置
1か月前
株式会社ミクロブ
把持装置
1か月前
日本精工株式会社
締結用工具
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
トヨタ自動車株式会社
カプラ接続治具
1か月前
工機ホールディングス株式会社
作業機
1日前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
移動ロボットシステム
12日前
トヨタ自動車株式会社
ロボット
4日前
株式会社不二越
エッジ仕上げ装置
22日前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
塗装システム
1日前
株式会社不二越
ロボットシステム
1か月前
本田技研工業株式会社
装置
15日前
トヨタ自動車株式会社
歩行ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
4日前
積水ハウス株式会社
フィルム除去具
2か月前
株式会社不二越
垂直多関節ロボット
23日前
ダイハツ工業株式会社
移載治具
1か月前
シンフォニアテクノロジー株式会社
搬送装置
12日前
ライオン株式会社
移載システム
24日前
工機ホールディングス株式会社
作業機
1日前
アネックスツール株式会社
ドライバービット
8日前
大和ハウス工業株式会社
ねじ回転工具
1か月前
株式会社不二越
協働ロボットシステム
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ