TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025149127
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049585
出願日
2024-03-26
発明の名称
作業装置および作業プログラム
出願人
株式会社デンソー
代理人
弁理士法人サトー
主分類
B25J
13/08 20060101AFI20251001BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ツールの操作性を向上させるとともに安全性を高める。
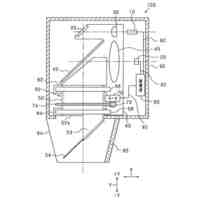
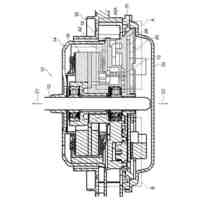
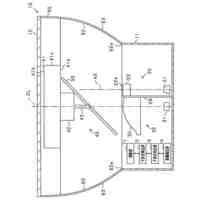
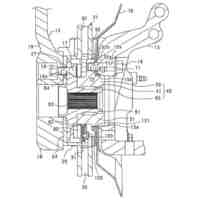
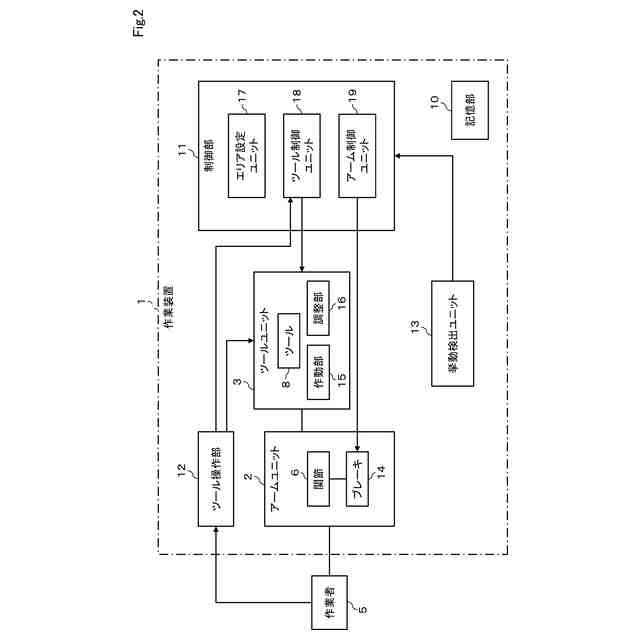
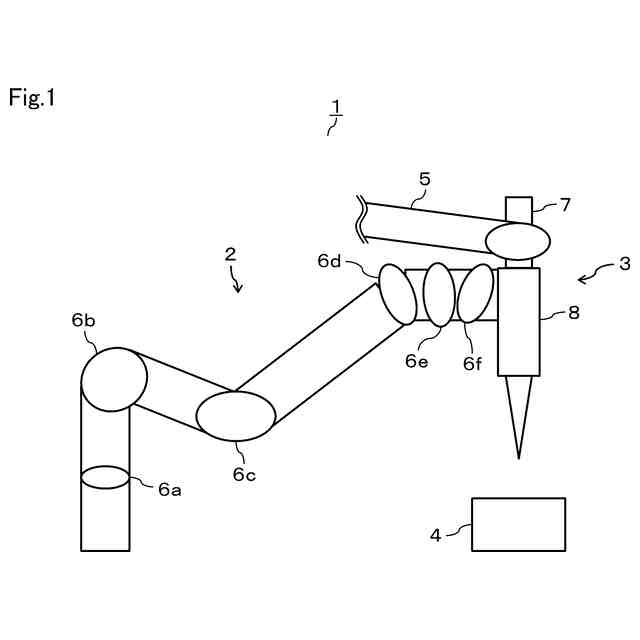
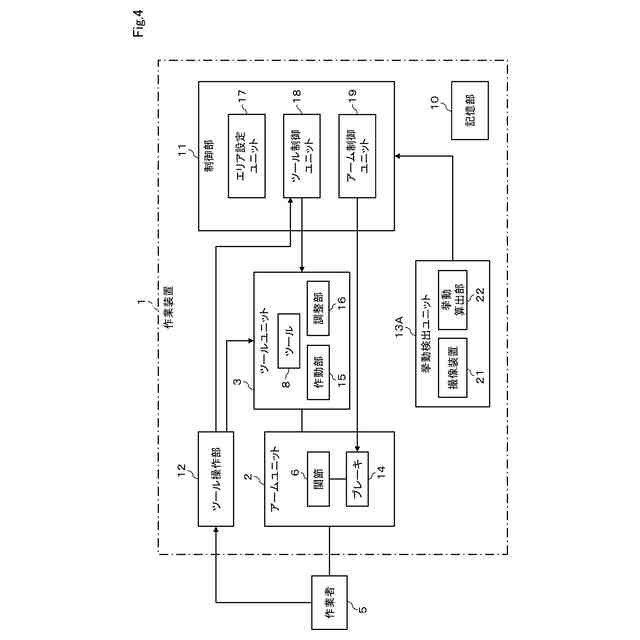
【解決手段】作業装置は、少なくとも1つの関節6と、前記関節の少なくとも一部における動作を制限可能なブレーキ14と、を備え、作業者5の身体部分に追従可能なアームユニット2と、前記アームユニットに連結され、所定の作業を行うためのツール8が設けられるツールユニット3と、前記アームユニットおよび前記ツールユニットを制御する制御部11と、前記アームユニットおよび前記ツールユニットのうち少なくとも一方の挙動を検出する挙動検出ユニット13と、を備える。前記制御部は、前記挙動検出ユニットによる検出結果に応じて前記ツールの動作を制限するためのツール制限制御および前記ブレーキの動作を制御するブレーキ制御のうち少なくとも一方を実行する。
【選択図】図2
特許請求の範囲
【請求項1】
少なくとも1つの関節(6)と、前記関節の少なくとも一部における動作を制限可能なブレーキ(14)と、を備え、作業者(5)の身体部分に追従可能なアームユニット(2)と、
前記アームユニットに連結され、所定の作業を行うためのツール(8)が設けられるツールユニット(3)と、
前記アームユニットおよび前記ツールユニットを制御する制御部(11、42、53、63)と、
前記アームユニットおよび前記ツールユニットのうち少なくとも一方の挙動を検出する挙動検出ユニット(13)と、
を備え、
前記制御部は、前記挙動検出ユニットによる検出結果に応じて前記ツールの動作を制限するためのツール制限制御および前記ブレーキの動作を制御するブレーキ制御のうち少なくとも一方を実行する作業装置。
続きを表示(約 2,300 文字)
【請求項2】
前記挙動検出ユニットは、少なくとも前記ツールの位置および角度を検出可能に構成され、
前記制御部は、
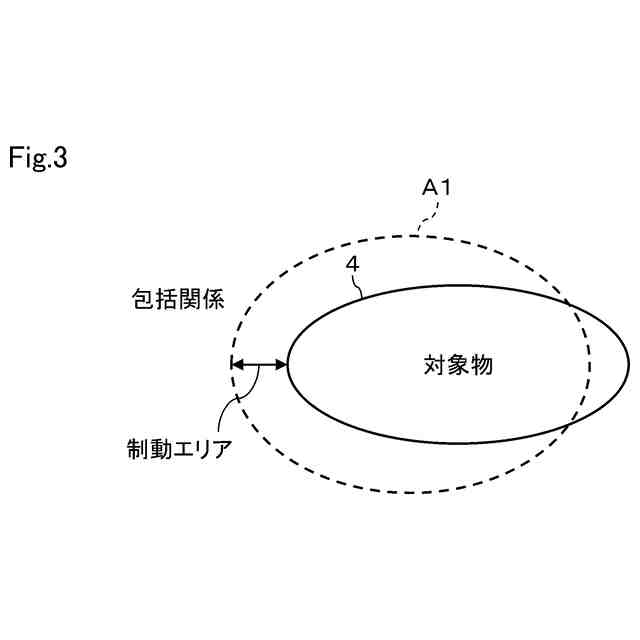
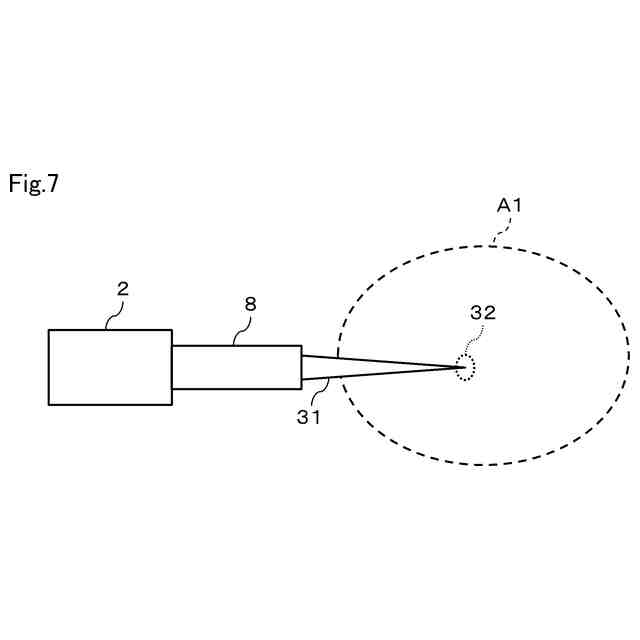
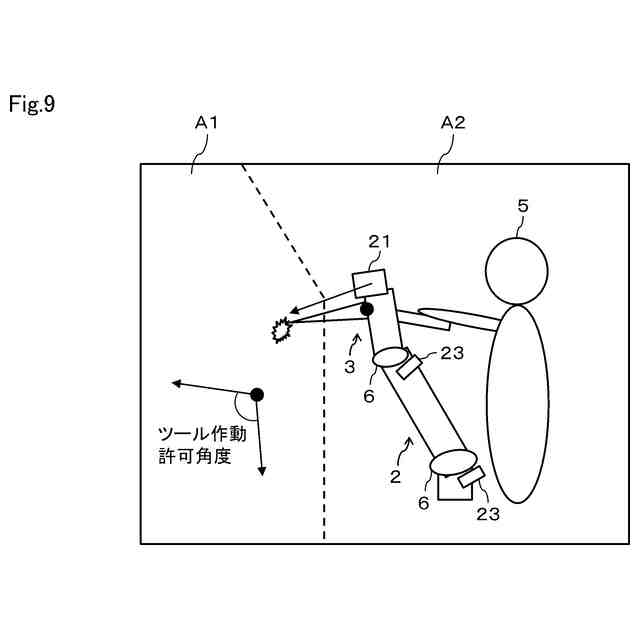
前記作業を行うための空間である作業空間に、前記ツールによる作業を許可する許可エリアを設定可能なエリア設定ユニット(17)を備え、
前記挙動検出ユニットによる検出結果に基づいて、前記ツールの出力が前記許可エリアの方向を向いているか否かの判断と、前記ツールの先端が前記許可エリアに入っているか否かの判断と、を行い、それらの判断結果に応じて前記ツール制限制御および前記ブレーキ制御のうち少なくとも一方を実行する請求項1に記載の作業装置。
【請求項3】
前記挙動検出ユニットは、少なくとも前記ツールの位置および角度を検出可能に構成され、
前記制御部は、
前記作業を行うための空間である作業空間に、前記ツールによる作業を禁止する禁止エリアを設定可能なエリア設定ユニット(17)を備え、
前記挙動検出ユニットによる検出結果に基づいて、前記ツールの先端が前記禁止エリアの方向を向いているか否かの判断を行い、その判断結果に応じて前記ツール制限制御および前記ブレーキ制御のうち少なくとも一方を実行する請求項1に記載の作業装置。
【請求項4】
前記挙動検出ユニットは、少なくとも前記ツールの位置および角度を検出可能に構成され、
前記制御部は、
前記作業を行うための空間である作業空間に、前記ツールによる作業を許可する許可エリアおよび前記ツールによる作業を禁止する禁止エリアを設定可能なエリア設定ユニット(17)を備え、
前記挙動検出ユニットによる検出結果に基づいて、前記ツールの出力が前記許可エリアの方向を向いているか否かの判断と、前記ツールの先端が前記許可エリアに入っているか否かの判断と、前記ツールの先端が前記禁止エリアの方向を向いているか否かの判断と、を行い、それらの判断結果に応じて前記ツール制限制御および前記ブレーキ制御のうち少なくとも一方を実行する請求項1に記載の作業装置。
【請求項5】
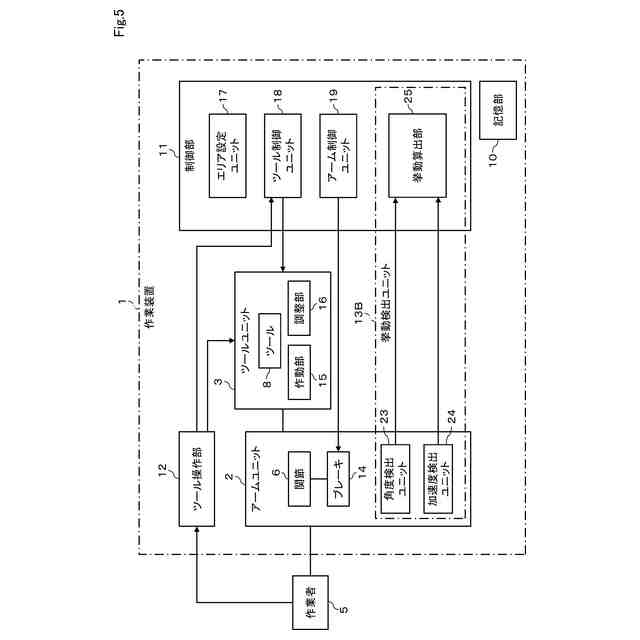
前記挙動検出ユニットは、前記ツールの進行方向および速度を算出可能に構成され、
前記制御部は、前記挙動検出ユニットによる検出結果に基づいて前記ツールの挙動を予測し、前記ツールが特定の挙動を示すことが予測されると、前記ツール制限制御および前記ブレーキ制御のうち少なくとも一方を実行する請求項2から4のいずれか一項に記載の作業装置。
【請求項6】
前記挙動検出ユニットは、前記ツールの加速度を算出可能に構成され、
前記制御部は、前記挙動検出ユニットによる検出結果に基づいて、前記ツールの加速度が所定の閾値を超えるか否かの判断と、前記アームユニットおよび前記ツールユニットのうち少なくとも一方の挙動を検出できない状態であるか否かの判断と、を行い、それらの判断結果に応じて前記ツール制限制御および前記ブレーキ制御のうち少なくとも一方を実行する請求項2から4のいずれか一項に記載の作業装置。
【請求項7】
前記挙動検出ユニットは、前記アームユニットのうち前記作業者の身体部分に追従可能な部分と前記ツールが連結される部分との間の所定の位置である基準位置の変動を算出可能に構成され、
前記エリア設定ユニットは、前記挙動検出ユニットにより算出された前記基準位置の変動に応じて前記禁止エリアを変動させる請求項3または4に記載の作業装置。
【請求項8】
前記作業の対象となる対象物の状態を検出する状態検出ユニット(52)を備え、
前記制御部(53)は、前記状態検出ユニットによる検出結果に基づいて、前記対象物の状態が予め設定された各種の条件を満たす正常な状態であるか否かの判断を行い、その判断結果に応じて前記ツール制限制御および前記ブレーキ制御のうち少なくとも一方を実行する請求項1に記載の作業装置。
【請求項9】
前記ツールによる前記作業の状況を検出する状況検出ユニット(62)を備え、
前記制御部(63)は、前記状況検出ユニットによる検出結果に基づいて、前記作業の状況が予め設定された各種の条件を満たす正常な状況であるか否かの判断を行い、その判断結果に応じて前記ツール制限制御および前記ブレーキ制御のうち少なくとも一方を実行する請求項1または8に記載の作業装置。
【請求項10】
少なくとも1つの関節(6)と、前記関節の少なくとも一部における動作を制限可能なブレーキ(14)と、を備え、作業者(5)の身体部分に追従可能なアームユニット(2)と、
前記アームユニットに連結され、所定の作業を行うためのツール(8)が設けられるツールユニット(3)と、
を備えた作業装置(1、41、51、61)を制御する作業プログラムであって、
プロセッサに、
前記アームユニットおよび前記ツールユニットを制御する制御手順と、
前記アームユニットおよび前記ツールユニットのうち少なくとも一方の挙動を検出する挙動検出手順と、
を実行させ、
前記制御手順では、前記挙動検出手順による検出結果に応じて前記ツールの動作を制限するためのツール制限制御手順および前記ブレーキの動作を制御するブレーキ制御手順のうち少なくとも一方を実行する作業プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物に対して所定の作業を行うための作業装置および作業プログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、対象物に対して例えば加工、組み立て、分解などの作業を行う場合における作業性の向上、作業者の負担軽減などを実現するための装置が求められている。特許文献1には、このような装置として、作業者の身体部分に追従可能なアームユニットを含む身体支持追従装置が開示されている。以下、特許文献1に開示される技術のことを従来技術と称することとする。
【先行技術文献】
【特許文献】
【0003】
特開2017-144522号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術のアームユニットに対して所定の作業を行うためのツールを連結させることにより、ツールの重量に起因する作業者の身体的負担や疲労を軽減させつつ、直感的且つ精密にツールを操作することができる作業装置を構築することが考えられる。しかしながら、このような従来技術を適用した作業装置には、次のような課題がある。すなわち、ツールには、先端の尖った部分である鋭利部、機械的に作動する部分である機械作動部、比較的高い温度となる部分である高温部などを有するもの、人体にとって有害な有害光線を発するものなど、いわゆる危険源を含むものが多い。
【0005】
そして、従来技術を適用した作業装置は、プログラム通りに自動で動くロボットのようなものではなく、作業者の身体部分に追従するように動作する、つまり動力が人であり、人が動かすものであることから、動作が不規則であり且つ速度や力が不安定になる可能性がある。このようなことから、従来技術を適用した作業装置では、作業ミスなどに起因して作業者に危険源が接触する可能性がある。従来技術では、ブレーキによりアームユニットの関節をロックするという構成があるものの、その構成は、作業者の安全、つまり作業者に危険源が接触するのを防止することを目的としたものではない。
【0006】
作業者の安全を目的とすると、作業者が操作し得る最大速度でツールを移動させた場合においてもアームが瞬時に停止するようなブレーキを設ける必要があるが、カウンターウエイトによる慣性力などの影響もあり、それは困難である。ブレーキ本体の重量やそれに対応するカウンターウエイトの重量が重くなると、ブレーキを作動させていないときの操作性が損なわれたり、動作が重くなったり、といった問題が生じるうえ、ブレーキ本体やカウンターウエイトの重量による慣性力が増すことに伴って人の力による制御が難しくなり精密な作業が困難になってしまう。
【0007】
本発明は上記事情に鑑みてなされたものであり、その目的は、ツールの操作性を向上させるとともに安全性を高めることができる作業装置および作業プログラムを提供することにある。
【課題を解決するための手段】
【0008】
本開示の一態様による作業装置は、少なくとも1つの関節(6)と、前記関節の少なくとも一部における動作を制限可能なブレーキ(14)と、を備え、作業者(5)の身体部分に追従可能なアームユニット(2)と、前記アームユニットに連結され、所定の作業を行うためのツール(8)が設けられるツールユニット(3)と、前記アームユニットおよび前記ツールユニットを制御する制御部(11、42、53、63)と、前記アームユニットおよび前記ツールユニットのうち少なくとも一方の挙動を検出する挙動検出ユニット(13)と、を備える。前記制御部は、前記挙動検出ユニットによる検出結果に応じて前記ツールの動作を制限するためのツール制限制御および前記ブレーキの動作を制御するブレーキ制御のうち少なくとも一方を実行する。
【0009】
本開示の一態様による作業プログラムは、少なくとも1つの関節(6)と、前記関節の少なくとも一部における動作を制限可能なブレーキ(14)と、を備え、作業者(5)の身体部分に追従可能なアームユニット(2)と、前記アームユニットに連結され、所定の作業を行うためのツール(8)が設けられるツールユニット(3)と、を備えた作業装置(1、41、51、61)を制御する作業プログラムであって、プロセッサに、前記アームユニットおよび前記ツールユニットを制御する制御手順と、前記アームユニットおよび前記ツールユニットのうち少なくとも一方の挙動を検出する挙動検出手順と、を実行させ、前記制御手順では、前記挙動検出手順による検出結果に応じて前記ツールの動作を制限するためのツール制限制御手順および前記ブレーキの動作を制御するブレーキ制御手順のうち少なくとも一方を実行する。
【0010】
これによれば、作業者に危険源が接触する可能性が生じた場合であっても、ツール制限制御が実行されることによりツールの出力を制限したり瞬時停止したりすることが可能となり、また、ブレーキ制御が実行されることによりアームユニットの関節の動きを抑制することが可能となり、その結果、作業者の安全性が確保される。このように、上記構成によれば、ツール制限制御およびブレーキ制御により作業者の安全性が確保されるようになっていることから、ブレーキとして、アームを瞬時に停止できるような能力のものは必要ではない。したがって、上記構成によれば、ツールの操作性を向上させるとともに安全性を高めることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソーウェーブ
筐体
2日前
株式会社デンソー
回転機
2日前
株式会社デンソー
検出装置
1日前
株式会社デンソー
レーダ装置
8日前
株式会社デンソー
電流センサ
2日前
株式会社デンソー
電力変換装置
3日前
株式会社デンソー
画像処理装置
2日前
株式会社デンソー
巻線界磁ロータ
3日前
株式会社デンソー
はんだ付け装置
3日前
株式会社デンソーウェーブ
レーザレーダ装置
1日前
株式会社デンソー
スイッチング素子
1日前
株式会社デンソー
ブラシレスモータ
1日前
株式会社デンソーウェーブ
レーザレーダ装置
1日前
株式会社デンソー
ステータ及びモータ
4日前
株式会社デンソー
スイッチング制御装置
4日前
株式会社デンソー
モータ部品、および、モータ
8日前
株式会社デンソー
検出装置、検出装置の製造方法
1日前
株式会社デンソー
検出装置、検出装置の製造方法
1日前
株式会社デンソー
検出装置、検出装置の製造方法
1日前
株式会社デンソー
検出装置、プログラム、及び算出方法
1日前
株式会社デンソー
モータ磁石、モータ部品、および、モータ
8日前
株式会社デンソー
接触センサおよび接触センサを備えたヒータ
1日前
株式会社デンソー
シザーズギア、アクチュエータ及び反力付与装置
1日前
株式会社デンソー
半導体モジュール、半導体装置、半導体モジュールの製造方法
1日前
株式会社デンソー
電力変換器の制御装置、プログラム、及び電力変換器の制御方法
2日前
株式会社デンソー
物標検出装置、物標検出方法、物標検出プログラム、および記録媒体
8日前
株式会社デンソー
情報処理装置、情報処理方法、情報処理プログラム、および記録媒体
8日前
株式会社デンソー
電界効果トランジスタ
1日前
株式会社豊田中央研究所
演算処理方法、演算処理プログラム、及び演算処理装置
2日前
株式会社デンソー
携帯型またはウェアラブル型で構成された電子機器
3日前
株式会社デンソー
車両用表示制御装置、車両用表示制御システム、車両用表示制御方法、及び車両用表示制御プログラム
1日前
株式会社デンソー
車両用表示制御装置、車両用表示制御システム、車両用表示制御方法、及び車両用表示制御プログラム
1日前
株式会社豊田中央研究所
ガス吸着用複合材料基板、それを備えるガスセンサ、及びガス吸着用複合材料基板の製造方法
2日前
個人
フラワーホッチキス。
4日前
株式会社三協システム
製函機
1か月前
川崎重工業株式会社
ロボット
17日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ