TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152925
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055110
出願日
2024-03-28
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
個人
,
個人
主分類
B25F
5/00 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】制御プログラムの書換え作業が容易な可能な作業機を提供する。
【解決手段】作業機1は、電池パック装着部2に電池パック90及び書込治具101を択一的に装着する。作業機1は、モータ6と、制御プログラムを記憶する記憶部21と、制御プログラムに従いモータ6の駆動を制御する制御部20と、モータ6の駆動及び停止を指示するためにユーザによって操作されるトリガスイッチ3と、を備える。作業機1は、電池パック装着部2に電池パック90が装着されている場合はトリガスイッチ3の操作により電源回路10及び制御部20が起動するよう構成され、電池パック装着部2に書込治具101が装着されている場合はトリガスイッチ3の操作によらず電源回路10及び制御部20が起動状態を維持するよう構成される。
【選択図】図3
特許請求の範囲
【請求項1】
電池パック及び制御プログラム書込用の外部機器を択一的に装着する作業機であって、
負荷部と、
制御プログラムを記憶する記憶部と、
前記制御プログラムに従い前記負荷部の駆動を制御する制御部と、
前記負荷部の駆動及び停止を指示するためにユーザによって操作される操作部と、
を備え、
前記作業機に前記電池パックが装着されている場合は前記操作部の操作により前記制御部が起動するよう構成され、
前記作業機に前記外部機器が装着され前記外部機器から電圧が入力されている場合は前記操作部の操作によらず前記制御部が起動状態を維持するよう構成される、
ことを特徴とする作業機。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の作業機であって、
前記作業機に前記電池パック及び前記外部機器のいずれが装着されているかを判別可能に構成された判別回路を備える、
ことを特徴とする作業機。
【請求項3】
請求項2に記載の作業機であって、
前記電池パックからの電池電圧、または、前記電池電圧とは異なる前記外部機器からの外部機器電圧が入力される電源端子を備え、
前記判別回路は、前記電源端子の電圧が前記電池電圧か前記外部機器電圧かを判別するよう構成される、
ことを特徴とする作業機。
【請求項4】
請求項3に記載の作業機であって、
前記判別回路は、前記電源端子の電圧が前記外部機器電圧を含む所定範囲内であって前記電池パックの公称電圧を含まない所定範囲内の場合に、前記作業機に前記外部機器が装着されていると判別し、前記電源端子の電圧が前記所定範囲内でない場合は前記作業機に前記電池パックが装着されていると判別する、
ことを特徴とする作業機。
【請求項5】
請求項4に記載の作業機であって、
前記判別回路は、
前記電池電圧又は前記外部機器電圧が入力される入力端子と、
出力端子と、
前記入力端子と前記出力端子との間の導通、遮断を切り替えるスイッチング素子と、
前記入力端子の電圧が立ち上がった際に一時的に前記スイッチング素子を導通状態にする入力側回路と、
前記スイッチング素子の前記出力端子側の電圧が前記所定範囲内の場合には前記スイッチング素子を導通状態に維持し、前記スイッチング素子の前記出力端子側の電圧が前記所定範囲内でない場合に前記スイッチング素子を遮断状態にする出力側回路と、を有する、
ことを特徴とする作業機。
【請求項6】
請求項5に記載の作業機であって、
前記入力側回路は、前記入力端子とグランドとの間に直列接続された抵抗及びコンデンサを有し、前記コンデンサに充電電流が流れることで前記スイッチング素子をオンするよう構成される、
ことを特徴とする作業機。
【請求項7】
請求項2から6のいずれか一項に記載の作業機であって、
前記判別回路は、前記制御部により停止可能に構成される、
ことを特徴とする作業機。
【請求項8】
請求項1に記載の作業機であって、
前記制御部に駆動電圧を供給する電源回路部を備え、
前記作業機に前記電池パックが装着されている場合は前記操作部の操作により前記電源回路部が起動するよう構成され、
前記作業機に前記外部機器が装着されている場合は前記操作部の操作によらず前記電源回路部が起動状態を維持するよう構成される、
ことを特徴とする作業機。
【請求項9】
請求項8に記載の作業機であって、
前記作業機に前記電池パック及び前記外部機器のいずれが装着されているかを判別可能に構成された判別回路を備え、
前記電源回路部は、前記電源回路部の駆動、停止を切り替える信号を受信する駆動停止切替端子を有し、
前記判別回路は、前記作業機に前記外部機器が装着されている場合に限り、前記駆動停止切替端子に前記電源回路部の駆動を指示する信号を継続的に出力するよう構成される、
ことを特徴とする作業機。
【請求項10】
請求項9に記載の作業機であって、
前記操作部の操作を検出する操作検出回路を備え、
前記操作検出回路は、前記作業機に前記電池パックか装着された後に前記操作部が操作された場合に限り、前記駆動停止切替端子に前記電源回路部の駆動を指示する信号を出力すると共に、前記制御部に前記操作部が操作されていることを示す信号を出力するよう構成される、
ことを特徴とする作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1は、作業機(例えば電動工具)の記憶部に書き込まれた制御プログラムを外部機器によって書き換える技術を開示する。特許文献2は、電源の接続後にトリガ等の操作部が操作された場合にマイコン等の制御部を起動する一方、操作部が操作された状態で電源が接続された場合には制御部を起動しない(又は負荷部を駆動しない)、いわゆる0Vリリース機能を開示する。
【先行技術文献】
【特許文献】
【0003】
特開2012-240169号公報
特開2020-196055号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、次の課題1、2の少なくともいずれかの解決を目的とする。
・課題1…制御プログラムの書換え作業が容易な可能な作業機を提供すること。
・課題2…電源電圧によってはトリガ等の操作部の操作によらず制御部を起動状態に維持することの可能な作業機を提供すること。
【課題を解決するための手段】
【0005】
本発明のある態様は、
電池パック及び制御プログラム書込用の外部機器を択一的に装着する作業機であって、
負荷部と、
制御プログラムを記憶する記憶部と、
前記制御プログラムに従い前記負荷部の駆動を制御する制御部と、
前記負荷部の駆動及び停止を指示するためにユーザによって操作される操作部と、
を備え、
前記作業機に前記電池パックが装着されている場合は前記操作部の操作により前記制御部が起動するよう構成され、
前記作業機に前記外部機器が装着されている場合は前記操作部の操作によらず前記制御部が起動状態を維持するよう構成される、
ことを特徴とする作業機である。
【0006】
本発明の別の態様は、
電源電圧が入力される電源端子と、
前記電源端子の電圧を判別する判別回路と、
前記電源電圧で駆動される負荷部と、
前記負荷部の駆動を制御する制御部と、
前記電源電圧を基に前記制御部の駆動電圧を供給する電源回路部と、
前記負荷部の駆動及び停止を指示するためにユーザによって操作される操作部と、
を備えた作業機であって、
前記電源回路部は、前記操作部の操作により起動するよう構成され、
前記判別回路は、前記電源端子の電圧が所定電圧範囲内のとき、前記操作部の操作によらず前記電源回路部を起動状態に維持するよう構成される、
ことを特徴とする作業機である。
【0007】
本発明は「電動作業機」や「電動工具」、「電気機器」等と表現されてもよく、そのように表現されたものも本発明の態様として有効である。
【発明の効果】
【0008】
本発明によれば、上記課題1、2の少なくともいずれかの解決が可能となる。
【図面の簡単な説明】
【0009】
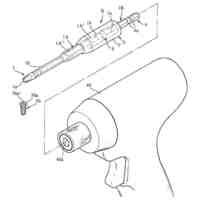
実施形態に係る作業機1に電池パック90を装着する場合の模式図。
作業機1に書込治具101を装着する場合の模式図。
作業機1、電池パック90、書込治具101、書込装置102、及びPC103の回路ブロック図。
作業機1の判別回路13の回路図。
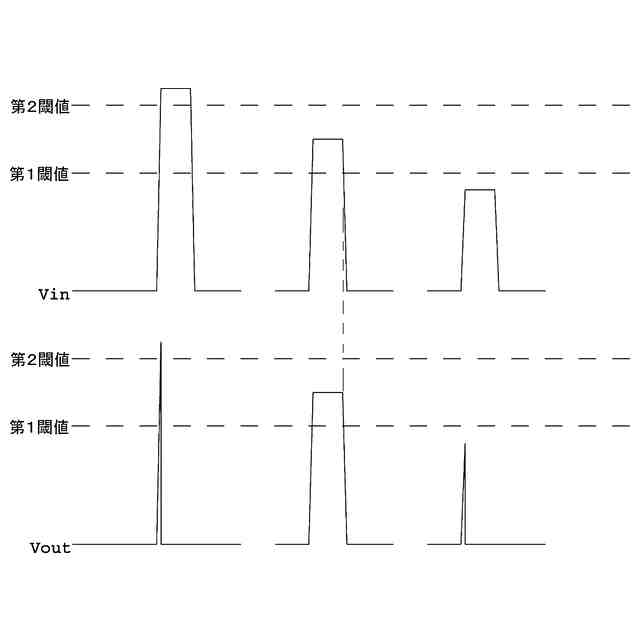
判別回路13の入出力波形の一例を示すグラフ(その1)。
判別回路13の入出力波形の一例を示すグラフ(その2)。
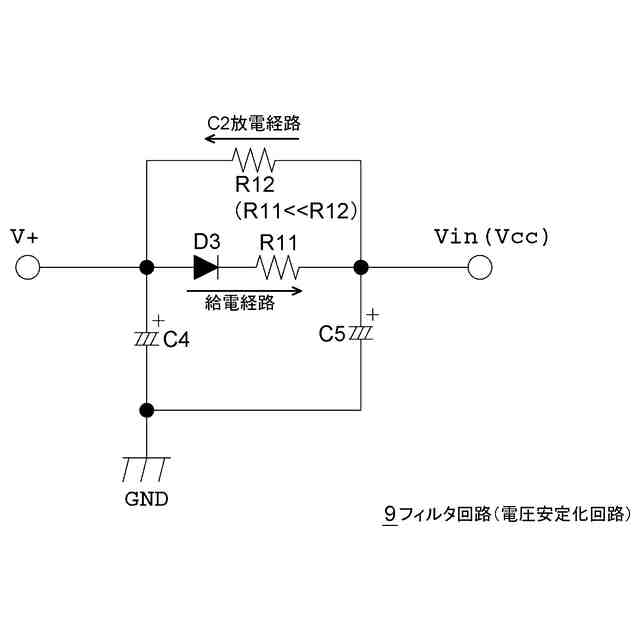
作業機1のフィルタ回路9の回路図。
作業機1のゲート回路15の回路図。
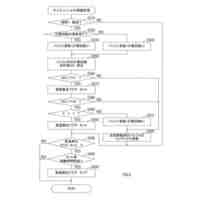
作業機1の動作のフローチャート。
作業機1に制御プログラムの書込動作を行う場合の各部の信号のタイミングチャート。
作業機1が通常動作を行う場合の各部の信号のタイミングチャート。
【発明を実施するための形態】
【0010】
本実施形態は、作業機1に関する。図1に示すように、作業機1は、電池パック装着部2及びトリガスイッチ3を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
1か月前
川崎重工業株式会社
ロボット
12日前
株式会社三協システム
製函機
1か月前
CKD株式会社
把持装置
1か月前
株式会社三協システム
移載装置
1か月前
株式会社不二越
ロボット
11日前
株式会社竹中工務店
補助セット
11日前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
ハンド
3日前
株式会社不二越
ロボット操作装置
1か月前
株式会社ミクロブ
把持装置
1か月前
SMC株式会社
着脱装置
1か月前
日本精工株式会社
締結用工具
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
トヨタ自動車株式会社
ロボット
6日前
工機ホールディングス株式会社
作業機
3日前
株式会社不二越
移動ロボットシステム
14日前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
塗装システム
3日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
エッジ仕上げ装置
24日前
本田技研工業株式会社
装置
17日前
トヨタ自動車株式会社
歩行ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
6日前
株式会社不二越
垂直多関節ロボット
25日前
アネックスツール株式会社
ドライバービット
10日前
ライオン株式会社
移載システム
26日前
シンフォニアテクノロジー株式会社
搬送装置
14日前
大和ハウス工業株式会社
ねじ回転工具
1か月前
ダイハツ工業株式会社
移載治具
1か月前
工機ホールディングス株式会社
作業機
3日前
ワールド技研株式会社
ロボットセル装置
11日前
川崎重工業株式会社
ワーク搬送ロボット
3日前
株式会社マキタ
回転打撃工具
6日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ