TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133647
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024031734
出願日
2024-03-01
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/22 20060101AFI20250904BHJP(水工;基礎;土砂の移送)
要約
【課題】油圧駆動システムにおいて、操作入力に対する制御対象要素の静特性および動特性への制御対象要素が含む誤差の積み重ねの影響を抑えることにより、制御ロバスト性を向上させることが可能な作業機械を提供する。
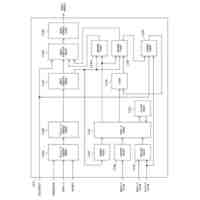
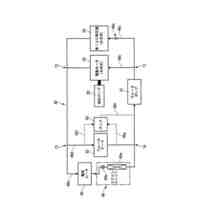
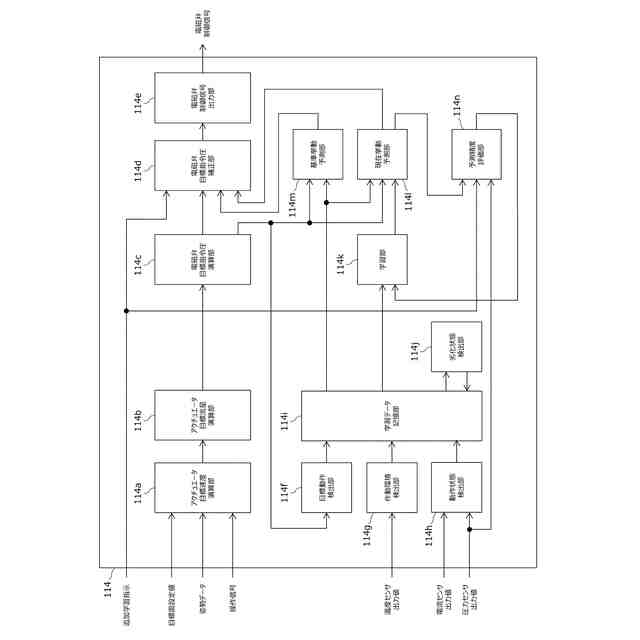
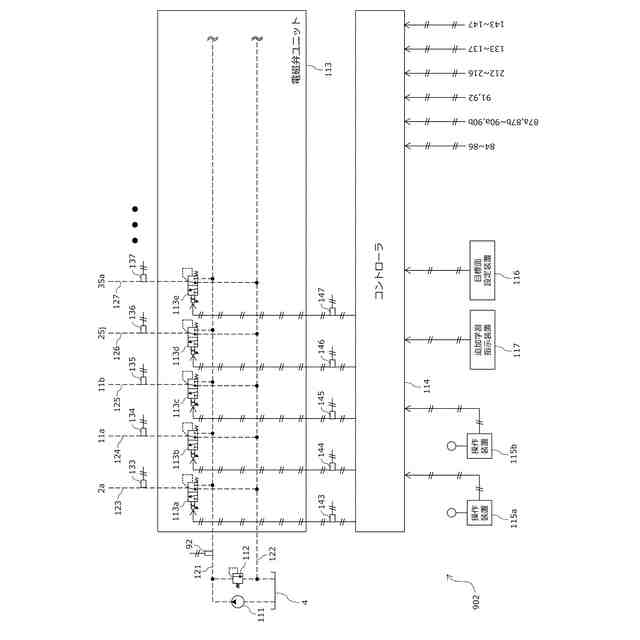
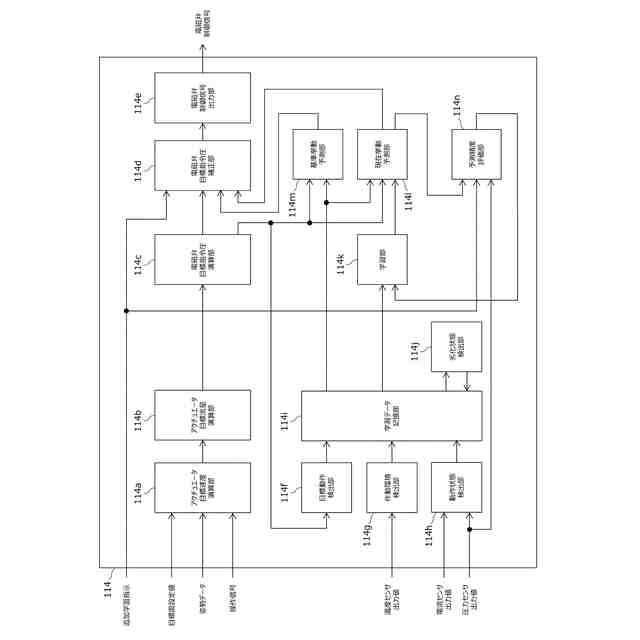
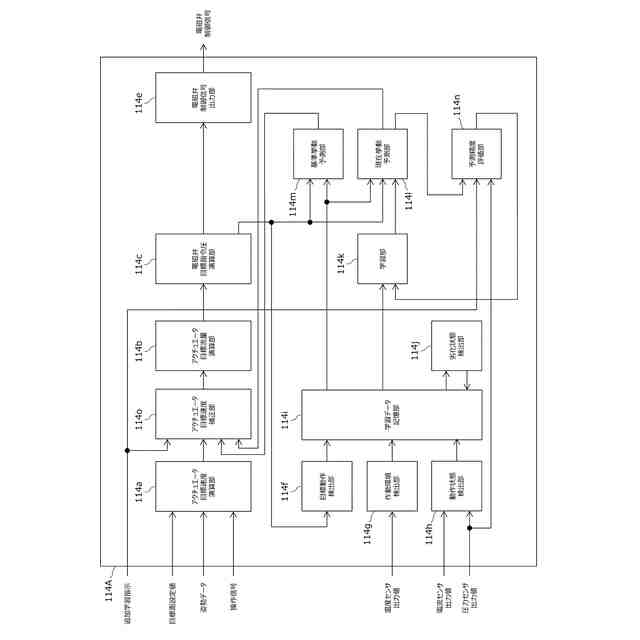
【解決手段】コントローラ114は、操作装置115a,115bから入力される操作信号に応じて、油圧駆動システム902の現在性能における電磁弁113a~113eの挙動を予測する現在挙動予測部114lと、操作装置115a,115bから入力される操作信号に応じて、油圧駆動システム902の基準性能における電磁弁113a~113eの挙動を予測する基準挙動予測部114mと、現在挙動予測部114lの予測結果が基準挙動予測部114mの予測結果に近づくように前記制御信号を補正する電磁弁目標指令圧補正部114dとを有する。
【選択図】 図4
特許請求の範囲
【請求項1】
車体と、
前記車体に取り付けられた作業装置と、
前記作業装置を駆動する油圧アクチュエータと、
前記油圧アクチュエータを駆動する油圧駆動システムと、
前記油圧アクチュエータの動作を指示する操作装置と、
前記操作装置から入力される操作信号に応じて前記油圧駆動システムを制御するコントローラとを備え、
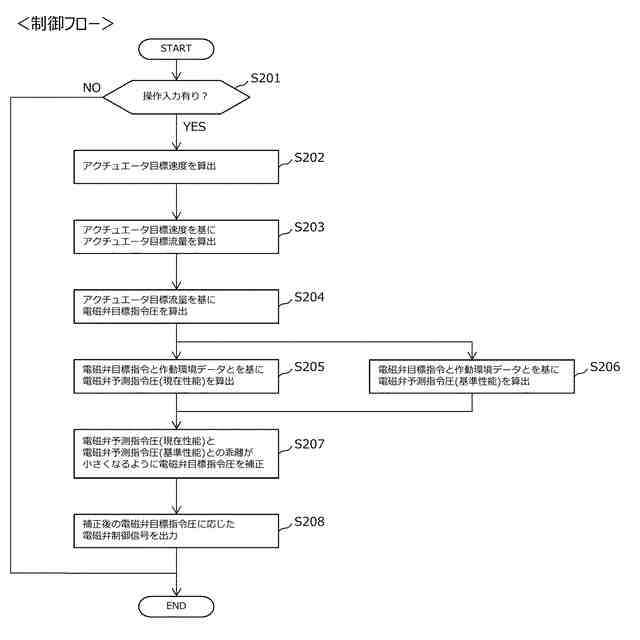
前記コントローラは、前記操作信号を基に前記油圧駆動システムの制御対象要素の目標制御量を算出する目標制御量演算部と、前記目標制御量に応じた制御信号を出力する制御信号出力部とを有する作業機械において、
前記コントローラは、
前記操作装置から入力される操作信号に応じて、前記油圧駆動システムの現在性能における前記目標制御量に対する前記制御対象要素の挙動を予測する現在挙動予測部と、
前記操作装置から入力される操作信号に応じて、前記油圧駆動システムの基準性能における前記目標制御量に対する前記制御対象要素の挙動を予測する基準挙動予測部と、
前記現在挙動予測部の予測結果が前記基準挙動予測部の予測結果に近づくように前記制御信号を補正する制御信号補正部とを有し、
前記制御信号出力部は、前記制御信号補正部によって補正された補正後の制御信号を前記油圧駆動システムに出力する
ことを特徴とする作業機械。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の作業機械において、
前記基準性能は、前記油圧駆動システムの設計仕様、または、前記制御対象要素の目標制御量と挙動との関係の較正が行われた際に測定された前記油圧駆動システムの性能である
ことを特徴とする作業機械。
【請求項3】
請求項1に記載の作業機械において、
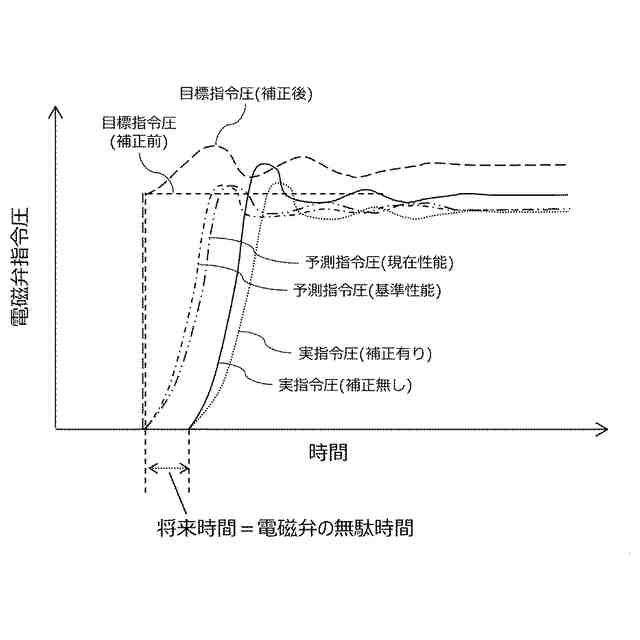
前記現在挙動予測部および前記基準挙動予測部は、それぞれ、前記制御信号が出力されてから予め設定された将来時間が経過した以降の前記制御対象要素の挙動を予測し、
前記将来時間は、前記制御信号に対する前記制御対象要素の無駄時間に基づいて設定されている
ことを特徴とする作業機械。
【請求項4】
請求項1に記載の作業機械において、
前記油圧駆動システムの稼働状態を検出する稼働状態検出部を備え、
前記基準挙動予測部は、前記目標制御量と前記稼働状態検出部からの検出値とを基に、前記基準性能における前記制御対象要素の挙動を予測し、
前記現在挙動予測部は、前記目標制御量と前記稼働状態検出部からの検出値とを基に、前記現在性能における前記制御対象要素の挙動を予測する
ことを特徴とする作業機械。
【請求項5】
請求項4に記載の作業機械において、
前記稼働状態検出部は、前記油圧駆動システムの作動環境を検出する作動環境検出部、および前記油圧駆動システムの動作状態を検出する動作状態検出部の少なくとも1つを有する
ことを特徴とする作業機械。
【請求項6】
請求項4に記載の作業機械において、
前記コントローラは、
前記稼働状態検出部の検出結果を学習データとして記憶する学習データ記憶部と、
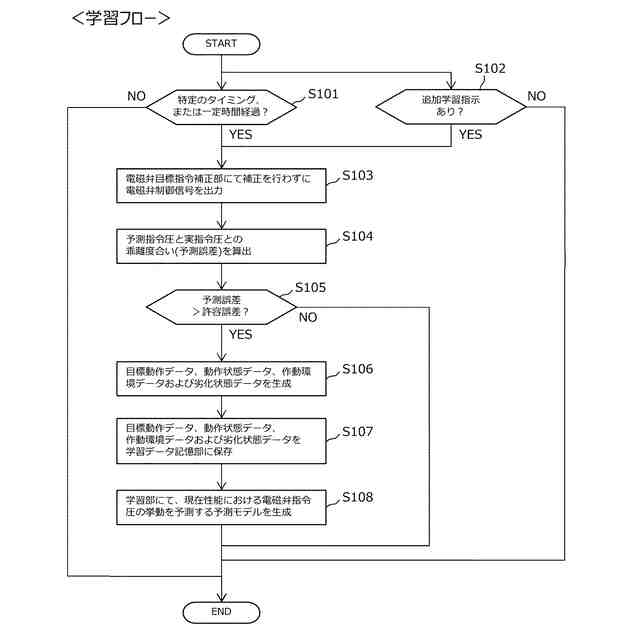
前記学習データを基に学習処理を行い、前記制御対象要素の挙動を予測する予測モデルを生成する学習部とを有し、
前記現在挙動予測部は、前記予測モデルを用いて、前記現在性能における前記制御対象要素の挙動を予測する
ことを特徴とする作業機械。
【請求項7】
請求項6に記載の作業機械において、
前記制御対象要素の制御量を計測する制御量計測装置を備え、
前記コントローラは、前記制御信号補正部が前記制御信号を補正しない状態での前記制御量の計測値と前記現在挙動予測部により算出された予測制御量との乖離度合いである予測誤差が所定の許容誤差を超えているか否かを判定する予測精度評価部を有し、
前記学習部は、前記予測精度評価部により前記予測誤差が前記許容誤差を超えていると判定された場合に、前記学習処理を実行し、前記予測モデルを更新する
ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、油圧ショベル等の作業機械に関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
一般的に油圧を動力とする作業機械の油圧駆動システムは、複数の油圧ポンプと、複数の油圧アクチュエータと、当該複数の油圧ポンプから当該複数の油圧アクチュエータに供給する作動油を制御するための複数の流量制御弁とから構成されている。この油圧構成要素は機械的に直接制御されることが一般的である。例えば、操作レバーの動きが油圧バルブの動作に機械的に作用し、これにより生成される油圧指令によりポンプやバルブの油圧構成要素の動作量が決定される。また、近年は、油圧構成要素の機械的な制御の代わりに電気信号を用いて油圧構成要素を制御する電子制御油圧駆動システムが開発されている。
【0003】
電子制御油圧駆動システムでは、入力指令を電流又は油圧構成要素の動作を駆動する信号に変換することができ、油圧構成要素の動作特性をコントローラによって制御することで様々な操作形態での操作や多様な機能の実装が容易である。その一方で、電子制御油圧駆動システムでは、操作指示入力から油圧構成要素を駆動されるまでの間に介在する構成要素が多く、また、それら構成要素が含む性能のばらつきや非線形特性によって生じる誤差の積み重ねにより、作業機械や油圧構成要素へ所望する動作と実際の動作との乖離が大きくなりやすいことが課題である。
【0004】
この課題を解決するための先行技術を開示する文献として、例えば特許文献1がある。特許文献1には、油圧バルブの稼働条件に対して測定された動作特性を基に構築されるトレーニングデータセットと、機械学習システムを利用して指令に対する油圧バルブの予測変位マップを生成し、そのマップを用いて目標速度に応じた油圧バルブの制御指令を演算することで、目標速度通りに精度よく作業機械を制御することが記載されている。
【先行技術文献】
【特許文献】
【0005】
特表2022―532740号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
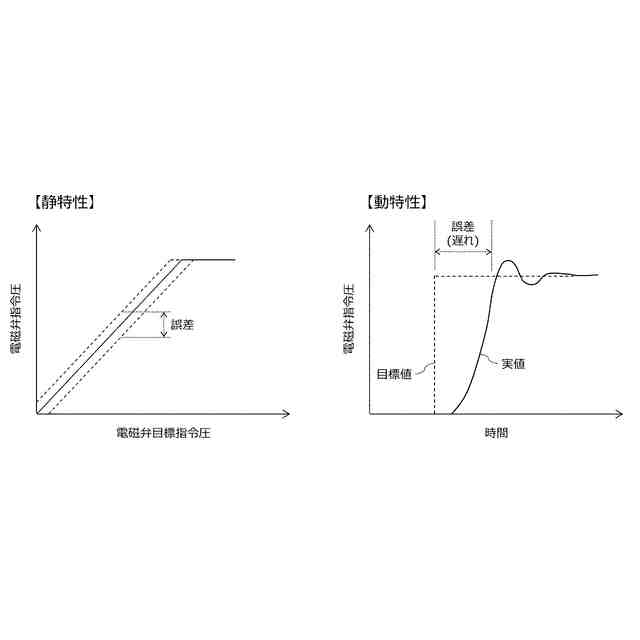
しかしながら、特許文献1に記載の予測変位マップを用いる方法によれば、時間要素を含まない定常状態での指令に対する油圧バルブの変位の特性、すなわち静特性において、油圧駆動システムの構成要素が含む性能のばらつきや非線形特性によって生じる誤差の積み重ねの影響を抑えることはできるものの、時間的に変化する目標値へ向けて変位する途中の油圧バルブの変位の特性、すなわち動特性において、この誤差の積み重ねの影響を抑えることができない。このため、油圧バルブの動特性にばらつきが生じるような稼働条件においては、油圧アクチュエータの始動時や加速・減速時に目標とするアクチュエータ速度と実際のアクチュエータ速度との間に乖離が生じてしまいバケットなどの作業装置の位置を精度よく制御することができない可能性がある。
【0007】
本発明は、上記の課題に鑑みてなされたものであり、その目的は、油圧駆動システムにおいて、操作入力に対する制御対象要素の静特性および動特性への制御対象要素が含む誤差の積み重ねの影響を抑えることにより、制御ロバスト性を向上させることが可能な作業機械を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明は、車体と、前記車体に取り付けられた作業装置と、前記作業装置を駆動する油圧アクチュエータと、前記油圧アクチュエータを駆動する油圧駆動システムと、前記油圧アクチュエータの動作を指示する操作装置と、前記操作装置から入力される操作信号に応じて前記油圧駆動システムを制御するコントローラとを備え、前記コントローラは、前記操作信号を基に前記油圧駆動システムの制御対象要素の目標制御量を算出する目標制御量演算部と、前記目標制御量に応じた制御信号を出力する制御信号出力部とを有する作業機械において、前記コントローラは、前記操作装置から入力される操作信号に応じて、前記油圧駆動システムの現在性能における前記制御対象要素の挙動を予測する現在挙動予測部と、前記操作装置から入力される操作信号に応じて、前記油圧駆動システムの基準性能における前記制御対象要素の挙動を予測する基準挙動予測部と、前記現在挙動予測部の予測結果が前記基準挙動予測部の予測結果に近づくように前記制御信号を補正する制御信号補正部とを有し、前記制御信号出力部は、前記制御信号補正部によって補正された補正後の制御信号を前記油圧駆動システムに出力するものとする。
【発明の効果】
【0009】
本発明によれば、油圧駆動システムにおいて、操作入力に対する制御対象要素の静特性および動特性への制御対象要素が含む誤差の積み重ねの影響を抑えることができるため、作業機械の制御ロバスト性を向上させることが可能となる。
【図面の簡単な説明】
【0010】
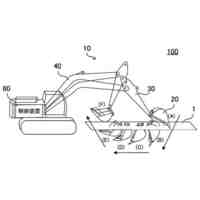
本発明の実施形態に係る油圧ショベルの側面図
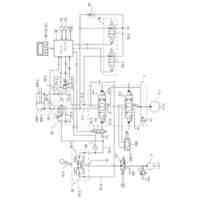
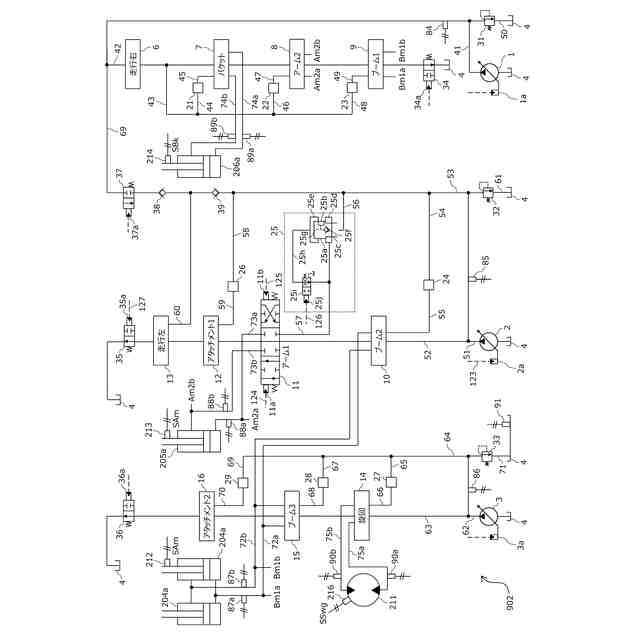
本発明の第1の実施例における油圧駆動システムの油圧回路図(1/2)
本発明の第1の実施例における油圧駆動システムの油圧回路図(2/2)
本発明の第1の実施例における電磁弁の動作特性を示す図
本発明の第1実施例におけるコントローラの機能ブロック図
本発明の第1実施例におけるコントローラの、学習処理に関わる演算処理を示すフロー図
本発明の第1実施例におけるコントローラの、油圧駆動システムの制御に関わる演算処理を示すフロー図
本発明の第1の実施例における電磁弁指令圧の挙動を示す図
本発明の第2実施例におけるコントローラの機能ブロック図
本発明の第2実施例におけるコントローラの、学習処理に関わる演算処理を示すフロー図
本発明の第2実施例におけるコントローラの、油圧駆動システムの制御に関わる演算処理を示すフロー図
本発明の第2の実施例におけるアクチュエータ速度の挙動を示す図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
2日前
日立建機株式会社
木材チップ搬出装置及び木材チップ詰め込み機
3日前
日立建機株式会社
作業機械
16日前
個人
大都市防災設備
24日前
日立建機株式会社
作業機械
1か月前
大成建設株式会社
新設構造物
29日前
株式会社武井工業所
積みブロック
4日前
個人
水底地盤の天地返し工法と専用作業船
26日前
株式会社本久
改良地盤構築方法
1か月前
日立建機株式会社
建設機械
1か月前
日本車輌製造株式会社
建設機械
1か月前
ヤンマーホールディングス株式会社
作業機械
29日前
株式会社大林組
基礎構造
26日前
ヤンマーホールディングス株式会社
作業機械
19日前
株式会社クボタ
作業機
1か月前
日立建機株式会社
作業機械
2日前
有限会社冨永総業
キャンプ用ペグ抜きハンマー
22日前
住友金属鉱山株式会社
タンク設置用基礎
19日前
株式会社地盤改良堀田
基礎杭の設置方法
23日前
株式会社フジタ
掘削機
3日前
株式会社山幸総建
シートパイルの土砂除去具
24日前
株式会社フジタ
建築物とその施工方法
1か月前
株式会社大林組
改良土の品質管理方法
1か月前
前田工繊株式会社
繊維製布団篭
1か月前
有限会社 櫂設計事務所
掘削・撹拌具
10日前
ナブテスコ株式会社
建設機械の関節機構
1か月前
株式会社日立建機ティエラ
建設機械
23日前
日本精機株式会社
施工管理システム及び施工管理方法
1か月前
日本車輌製造株式会社
建設機械の組立方法
19日前
個人
日本列島都市防災設備又は日本列島大都市防災設備
18日前
アクアインテック株式会社
メーターボックスの蓋
29日前
株式会社武井工業所
積みブロック用基礎ブロック
4日前
アロン化成株式会社
排水管通気設備
24日前
株式会社小松製作所
作業機械
4日前
日本車輌製造株式会社
取付具
1か月前
株式会社 CUP商会
仮補強リングの使用方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ