TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025132138
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024029503
出願日
2024-02-29
発明の名称
掘削機
出願人
株式会社フジタ
代理人
インフォート弁理士法人
主分類
E02F
3/43 20060101AFI20250903BHJP(水工;基礎;土砂の移送)
要約
【課題】自動化された掘削作業の作業効率を改善する技術を提供する。
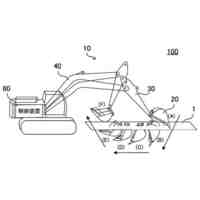
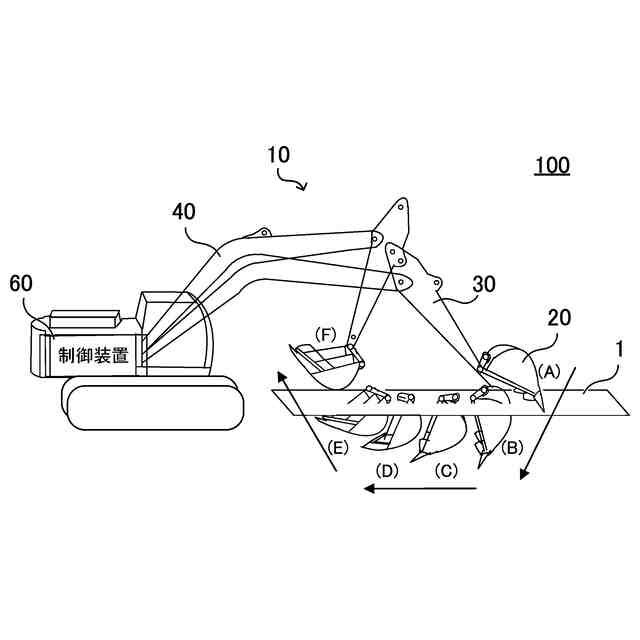
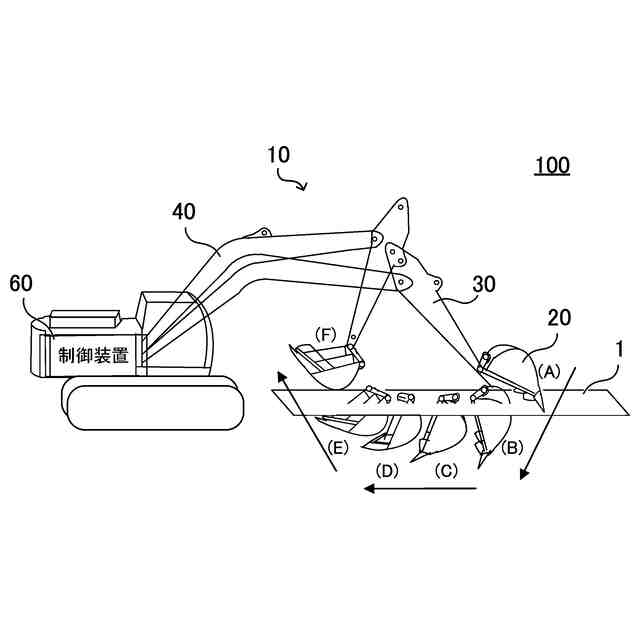
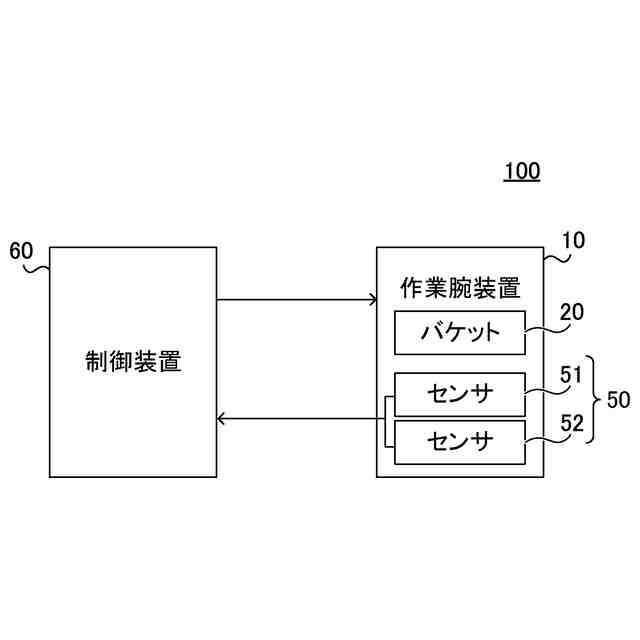
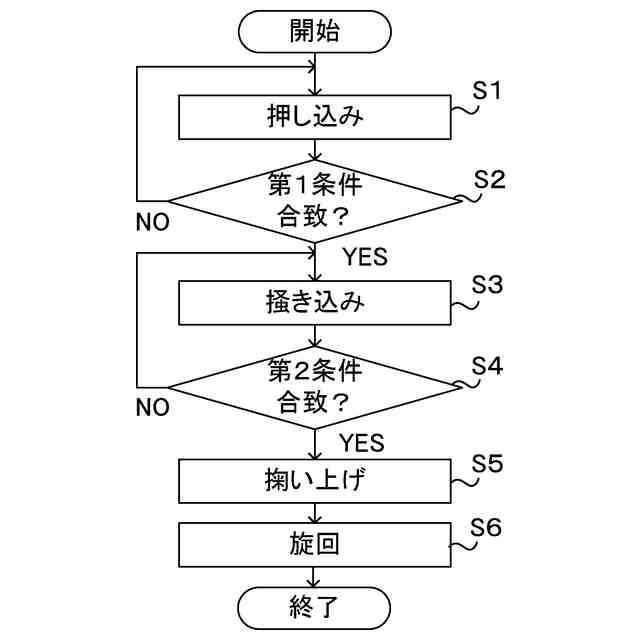
【解決手段】バックホウ100は、バケット20を有し、バケット20で土砂1を掘削する作業腕装置10と、作業腕装置10に取り付けられた、土砂1を検出するセンサと、作業腕装置10の動作を制御する制御装置60を備える。制御装置60は、センサの検出結果に基づいて、バケット20を動かす鉛直下方向成分を含む押し込み動作からバケット20を動かす水平方向成分を含む掻き込み動作への移行タイミングと、掻き込み動作からバケット20を動かす鉛直上方向成分を含む掬い上げ動作への移行タイミングを決定する。
【選択図】図1
特許請求の範囲
【請求項1】
バケットを有し、前記バケットで掘削対象を掘削する作業腕装置と、
前記作業腕装置に取り付けられた、前記掘削対象を検出するセンサと、
前記作業腕装置の動作を制御する制御装置であって、前記センサの検出結果に基づいて、前記バケットを動かす鉛直下方向成分を含む第1動作から前記バケットを動かす水平方向成分を含む第2動作への移行タイミングと、前記第2動作から前記バケットを動かす鉛直上方向成分を含む第3動作への移行タイミングを決定する制御装置と、を備える
ことを特徴とする掘削機。
続きを表示(約 680 文字)
【請求項2】
請求項1に記載の掘削機において、
前記センサは、
前記バケットと前記掘削対象の表面との鉛直方向の位置関係を検出する第1センサと、
前記バケット内の所定領域における前記掘削対象の存在を検出する第2センサと、を含み、
前記制御装置は、
前記第1センサの検出結果に基づいて、前記第1動作から前記第2動作への移行タイミングを決定し、
前記第2センサの検出結果に基づいて、前記第2動作から前記第3動作への移行タイミングを決定する
ことを特徴とする掘削機。
【請求項3】
請求項2に記載の掘削機において、
前記作業腕装置は、さらに、前記バケットを支持するアームを有し、
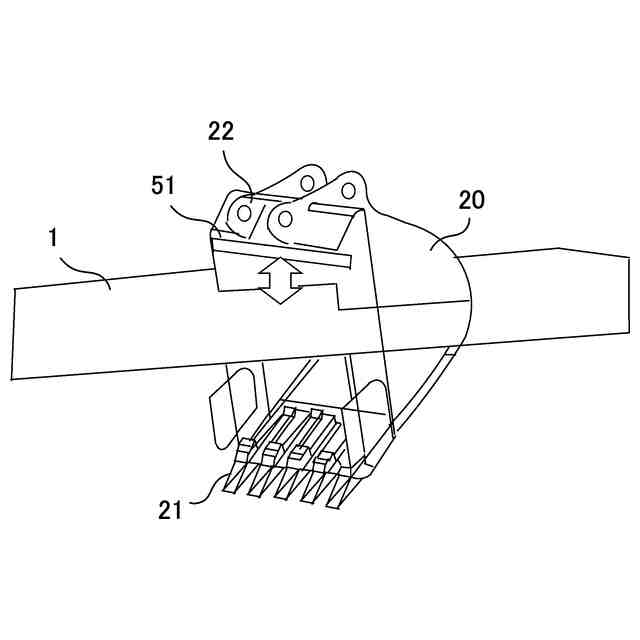
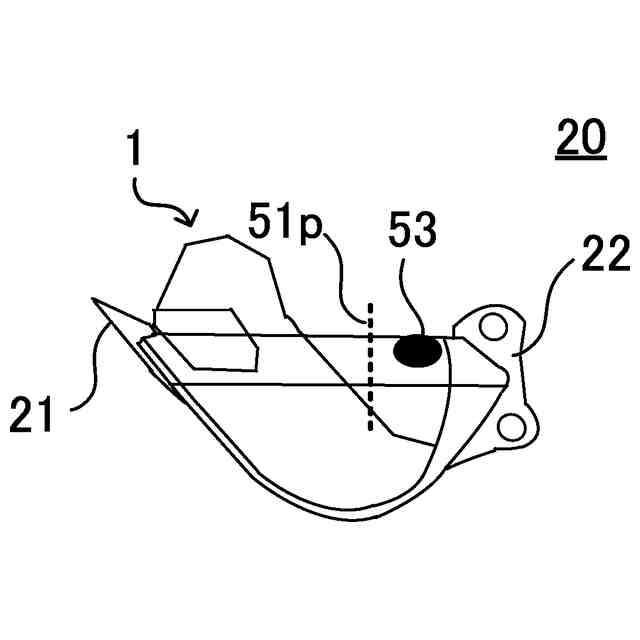
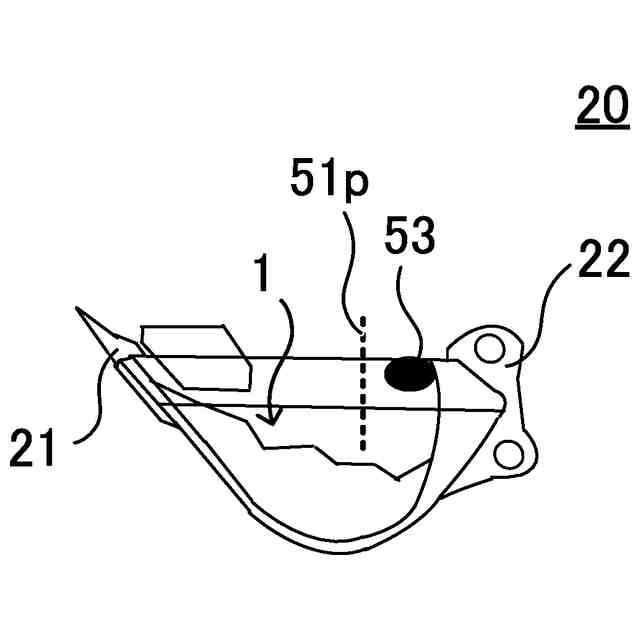
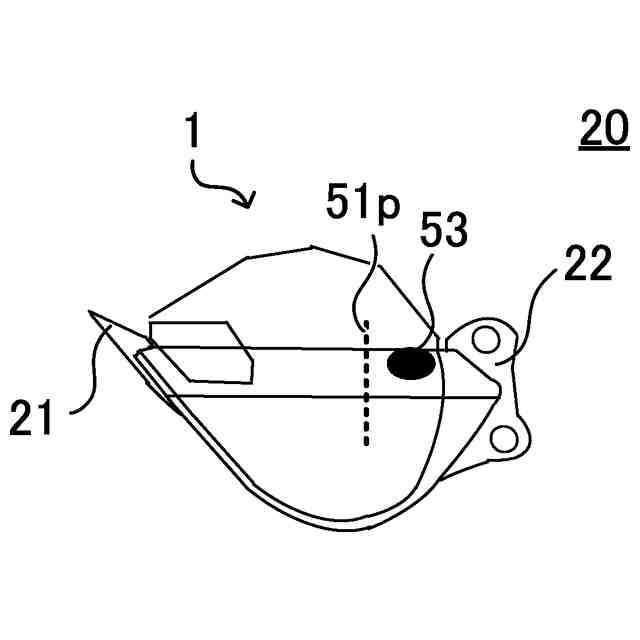
前記第1センサは、前記バケットの前記アーム側のエッジに前記バケットのツースへ向けて配置された、前記表面までの距離を検出し、
前記制御装置は、
前記第1センサが所定距離以内に前記表面を検出したときに、前記作業腕装置の動作を、前記第1動作から前記第2動作へ移行し、
前記第2センサが前記所定距離に対応する位置よりも前記アーム側にある前記エッジの近傍領域に前記掘削対象の存在を検出したときに、前記作業腕装置の動作を、前記第2動作から前記第3動作へ移行する
ことを特徴とする掘削機。
【請求項4】
請求項1乃至請求項3の何れか1項に記載の掘削機において、
前記センサは、前記バケットに取り付けられている
ことを特徴とする掘削機。
発明の詳細な説明
【技術分野】
【0001】
本明細書の開示は、掘削機に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
人手不足と重機不足を背景に、重機による無人作業が検討されている。しかしながら、作業効率がオペレータの技量に依存しやすい掘削作業の自動化は、一回の掘削動作における掘削量が不安定になりやすく、結果として単位時間当たりの掘削量が有人作業に劣るという課題がある。
【0003】
これに関連する技術は、例えば、特許文献1に記載されている。特許文献1には、バケット内の土量を検知可能な土量検知装置付きバケットが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開平03-208920号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1には、バケット内の土量を検知する構成が記載されているが、一回の掘削動作における掘削量を安定化させて、単位時間当たりの掘削量を改善する技術は記載されていない。
【0006】
以上のような実情を踏まえ、本発明の一側面に係る目的は、自動化された掘削作業の作業効率を改善する技術を提供することである。
【課題を解決するための手段】
【0007】
本発明の一態様に係る掘削装置は、バケットを有し、前記バケットで掘削対象を掘削する作業腕装置と、前記作業腕装置に取り付けられた、前記掘削対象を検出するセンサと、前記作業腕装置の動作を制御する制御装置であって、前記センサの検出結果に基づいて、前記バケットを動かす鉛直下方向成分を含む第1動作から前記バケットを動かす水平方向成分を含む第2動作への移行タイミングと、前記第2動作から前記バケットを動かす鉛直上方向成分を含む第3動作への移行タイミングを決定する制御装置と、を備える。
【発明の効果】
【0008】
上記の態様によれば、自動化された掘削作業の作業効率を改善する技術を提供することができる。
【図面の簡単な説明】
【0009】
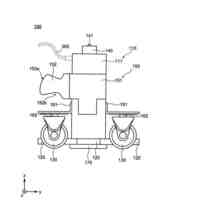
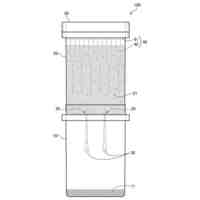
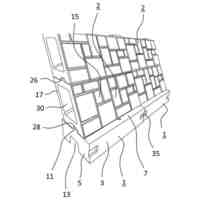
一実施形態に係る掘削機の構成を例示した図である。
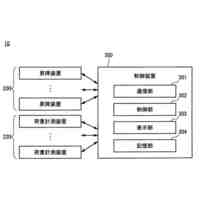
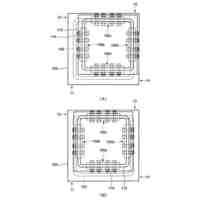
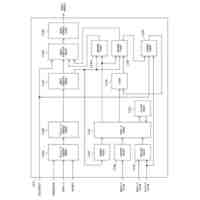
掘削機の自動掘削制御に関連する構成のブロック図の一例である。
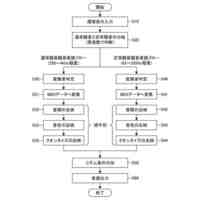
掘削機の制御装置が行う制御処理の一例を示すフローチャートである。
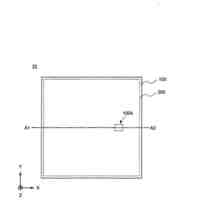
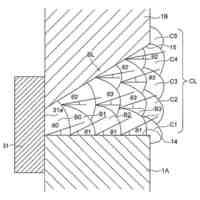
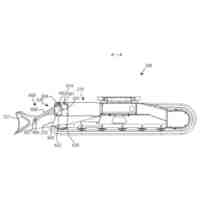
掘削機が有する第1センサの一例を説明するための図である。
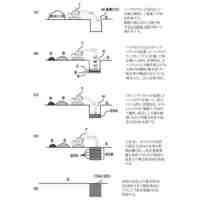
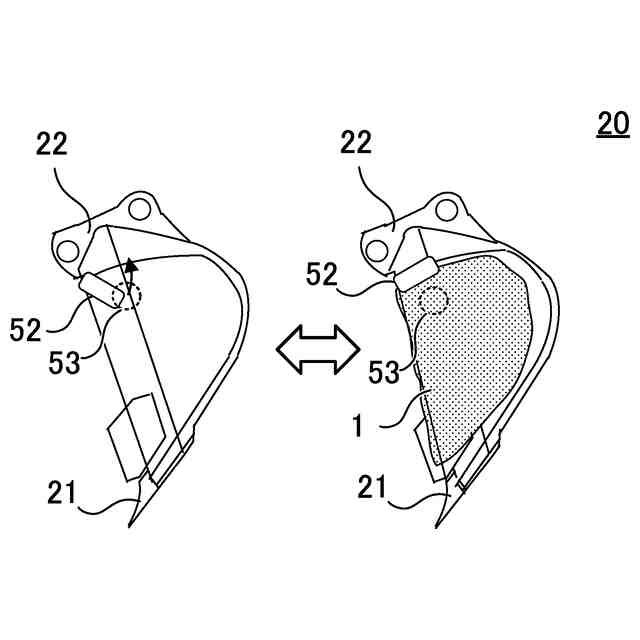
土砂が十分に充填されていないバケットの状態を例示した図である。
土砂が十分に充填されていないバケットの別の状態を例示した図である。
土砂が十分に充填されたバケットの状態を例示した図である。
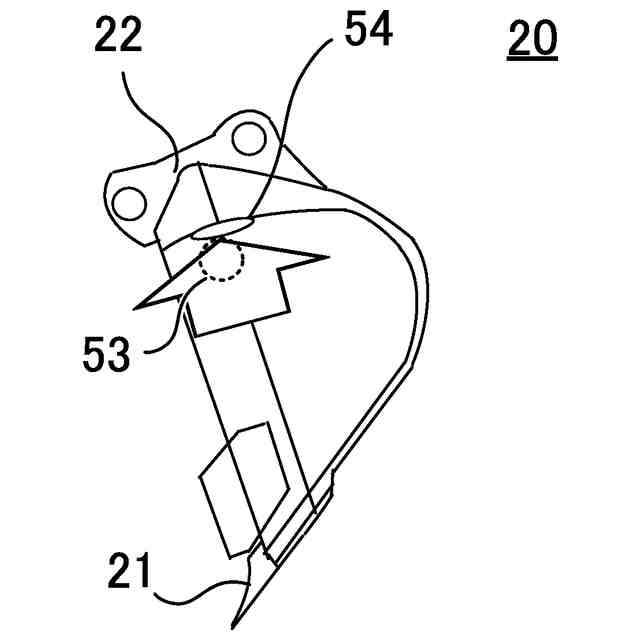
掘削機が有する第2センサの一例を説明するための図である。
掘削機が有する第2センサの別の例を説明するための図である。
掘削機が有する第2センサの更に別の例を説明するための図である。
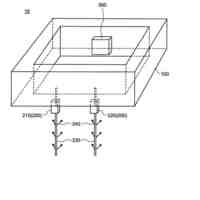
一実施形態に係るシステムの構成を例示した図である。
【発明を実施するための形態】
【0010】
図1は、一実施形態に係る掘削機であるバックホウ100の構成を例示した図である。図2は、図1に示すバックホウ100の自動掘削制御に関連する構成のブロック図の一例である。以下、図1及び図2を参照しながら、バックホウ100の構成について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社フジタ
掘削機
2日前
株式会社フジタ
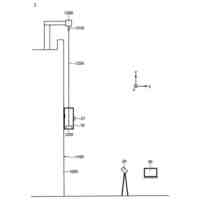
昇降システム
23日前
株式会社フジタ
昇降システム
3日前
株式会社フジタ
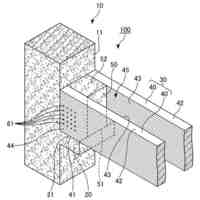
柱梁接合構造
1か月前
株式会社フジタ
昇降システム
1か月前
株式会社フジタ
情報提供システム
1か月前
株式会社フジタ
状態評価システム
3日前
株式会社フジタ
建築物とその施工方法
1か月前
株式会社フジタ
環境音快音化システム
14日前
株式会社フジタ
コンクリートの作製方法
2か月前
株式会社フジタ
柱梁接合構造とその施工方法
1か月前
株式会社フジタ
二酸化炭素分離回収供給装置
2日前
株式会社フジタ
二酸化炭素分離回収供給装置
2日前
株式会社フジタ
柱梁接合構造とその施工方法
1か月前
株式会社フジタ
荷重計測装置および昇降システム
25日前
株式会社フジタ
被覆シートおよび二酸化炭素供給方法
2日前
株式会社フジタ
状態評価装置および状態評価システム
3日前
大和ハウス工業株式会社
溶接システム
2か月前
株式会社フジタ
振動発生源報知装置および振動発生源報知方法
10日前
株式会社フジタ
二酸化炭素吸着装置及び二酸化炭素の吸着方法
3日前
株式会社フジタ
角形鋼管柱の継手構造
21日前
個人
大都市防災設備
23日前
日立建機株式会社
作業機械
29日前
大成建設株式会社
新設構造物
28日前
株式会社武井工業所
積みブロック
3日前
個人
水底地盤の天地返し工法と専用作業船
25日前
ヤンマーホールディングス株式会社
作業機械
18日前
株式会社本久
改良地盤構築方法
1か月前
日立建機株式会社
作業機械
1日前
株式会社クボタ
作業機
1か月前
日立建機株式会社
建設機械
1か月前
ヤンマーホールディングス株式会社
作業機械
28日前
株式会社大林組
基礎構造
25日前
住友金属鉱山株式会社
タンク設置用基礎
18日前
有限会社冨永総業
キャンプ用ペグ抜きハンマー
21日前
株式会社地盤改良堀田
基礎杭の設置方法
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ