TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025136635
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024035346
出願日
2024-03-07
発明の名称
加工装置
出願人
株式会社東京精密
代理人
弁理士法人太陽国際特許事務所
主分類
B24B
7/00 20060101AFI20250911BHJP(研削;研磨)
要約
【課題】チャックテーブルの剛性に拘わらずチャックテーブルの姿勢の変動を抑制する。
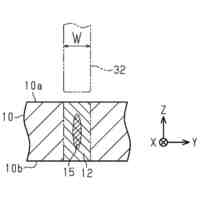
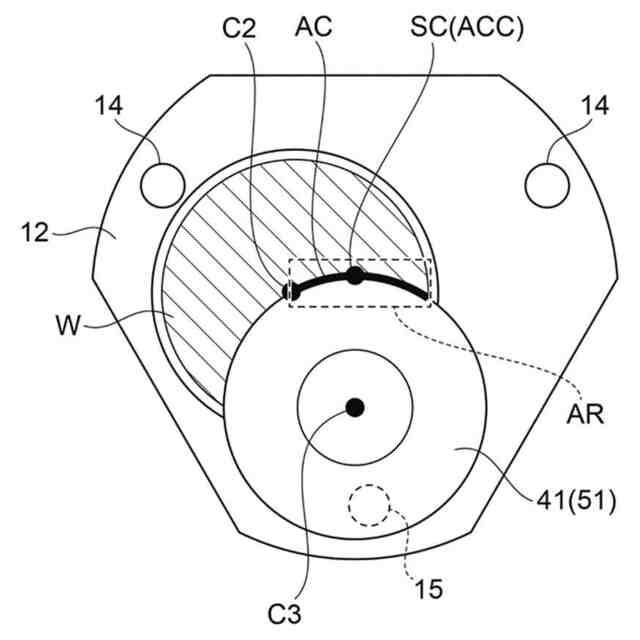
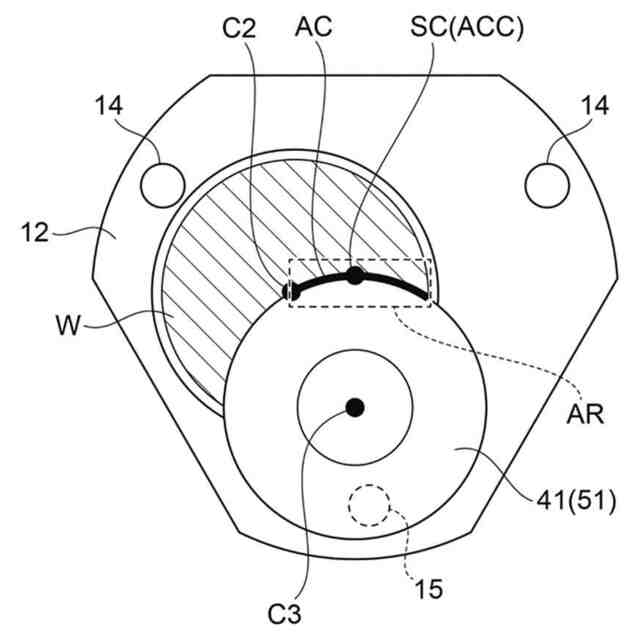
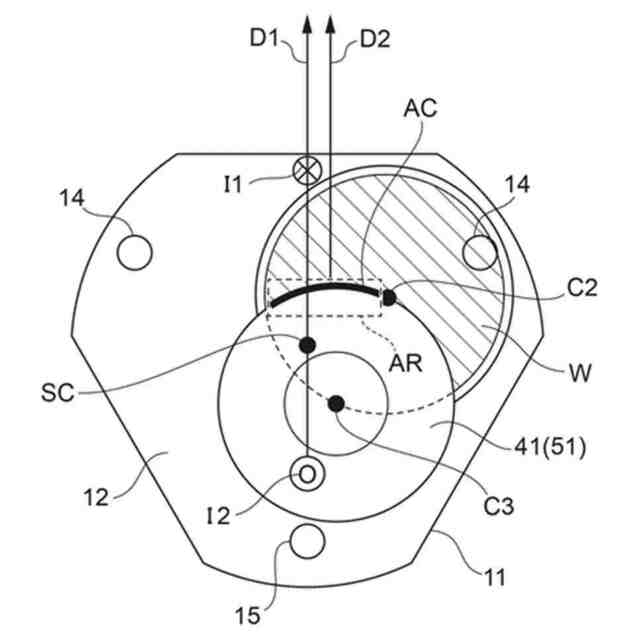
【解決手段】この加工装置1は、略円板形状のワークWを回転可能に支持するチャックテーブル12と、チャックテーブル12を支持するチャックテーブル支持機構80と、ワークWを研削する砥石41、51を回転可能に保持する研削部40、50とを備える。チャックテーブル支持機構80の支持反力の作用点は、チャックテーブル12の回転中心C2に対して偏心しており、加えて、砥石41、51がワークWに接触する円弧状部分ACを含む加工領域ARの両端部を除く部分に、支持反力の作用点が含まれるよう、研削部40、50とチャックテーブル12との位置関係が設定されている。
【選択図】図5
特許請求の範囲
【請求項1】
略円板形状のワークを回転可能に支持するチャックテーブルと、
前記ワークを研削する砥石を回転可能に保持する研削部と、
前記チャックテーブルを支持する支持体を含んで構成され、前記支持体の支持反力の作用点は、前記チャックテーブルの回転中心に対して偏心しており、前記砥石が前記ワークに接触する円弧状部分を含む加工領域の両端部を除く部分に、前記作用点が含まれるよう、前記研削部に対する位置関係が設定されている、チャックテーブル支持機構と
を備えた、加工装置。
続きを表示(約 680 文字)
【請求項2】
前記加工領域は、前記円弧状部分を囲う矩形の領域である、請求項1に記載の加工装置。
【請求項3】
前記ワークの研削時における前記チャックテーブルの姿勢変動の方向と、前記加工領域の短手方向とが略一致するよう、前記研削部と前記チャックテーブルとの位置関係が設定されている、請求項1又は2に記載の加工装置。
【請求項4】
前記支持体は複数の支持部を含んで構成されており、
前記複数の支持部の支持反力の合力である作用点は、前記複数の支持部を結ぶ多角形の重心位置であって、
前記チャックテーブル支持機構は、前記加工領域の両端部を除く部分に前記重心位置が含まれるよう、前記研削部に対する位置関係が設定されている、請求項1に記載の加工装置。
【請求項5】
略円板形状のワークを回転可能に支持するチャックテーブルと、
前記ワークを研削する砥石を回転可能に保持する研削部と、
前記チャックテーブルを支持する支持体を含んで構成され、前記支持体の支持反力の作用点は、前記チャックテーブルの回転中心に対して偏心しており、前記ワークの研削時における前記チャックテーブルの姿勢変動の方向と、前記砥石が前記ワークに接触する円弧状部分を含む加工領域の短手方向とが略一致するよう、前記研削部に対する位置関係が設定されている、チャックテーブル支持機構と
を備えた、加工装置。
【請求項6】
前記加工領域は、前記円弧状部分を囲う矩形の領域である、請求項5に記載の加工装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、半導体ウェハ等のワークを研削加工する加工装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
半導体製造分野では、シリコンウェハ等の半導体ウェハ(以下、「ウェハ」という)を薄く形成するために、ウェハの裏面を研削する裏面研削が行われている。例えば、特許文献1には、回転可能なチャックテーブル上に搭載されたウェハを、チャックテーブル上に回転可能に配置された砥石により研削するインフィード研削装置が開示されている。インフィード研削装置では、研削前にウェハの厚み形状を測定し、その結果に従ってチャックテーブルの傾斜量と砥石の傾斜量を調整し、砥石のエッジの円弧状の部分をウェハに押し当てて研削を実行する。
【先行技術文献】
【特許文献】
【0003】
特開2016-201422号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した加工装置では、加工中におけるチャックテーブルの姿勢の変動を抑制することが求められる。従来、姿勢の変動の抑制のためには、チャックテーブルの剛性の向上を図る技術が提案されている。しかし、チャックテーブルの剛性を高めることには限界があり、また剛性を高めることはコストの増大にも繋がる。
【0005】
本開示は、チャックテーブルの剛性に拘わらず、チャックテーブルの姿勢の変動を抑制し、これにより加工の更なる高精度化と、面内厚み変動(TTV)の向上を図ることができる加工装置を提供するものである。
【課題を解決するための手段】
【0006】
本開示の第1の態様に係る加工装置は、略円板形状のワークを回転可能に支持するチャックテーブルと、前記ワークを研削する砥石を回転可能に保持する研削部と、前記チャックテーブルを支持する支持体で構成されるチャックテーブル支持機構とを備える。前記チャックテーブル支持機構の支持体の支持反力の作用点は、前記チャックテーブルの回転中心に対して偏心している。加えて、前記砥石が前記ワークに接触する円弧状部分を含む加工領域の両端部を除く部分に、前記作用点が含まれるよう、前記研削部と前記チャックテーブルとの位置関係が設定されている。なお、位置関係に加えて、チャックテーブル支持機構における各部材の配分が適宜設定されてもよい。
【0007】
ここで、加工領域は、前記円弧状部分を囲う矩形の領域として定義することができる。また、上記の特徴に加え、前記ワークの研削時における前記チャックテーブルの姿勢変動の方向と、前記加工領域の短手方向とが略一致するよう、前記研削部と前記チャックテーブルとの位置関係が設定されることも可能である。また、前記支持体は複数の支持部により構成されており、前記複数の支持部の支持反力の合力である作用点は、前記複数の支持部を結ぶ多角形の重心位置であって、前記チャックテーブル支持機構は、前記加工領域の両端部を除く部分に前記重心位置が含まれるよう、前記研削部に対する位置関係が設定されることもできる。なお、位置関係に加えて、チャックテーブル支持機構における各部材の配分が適宜設定されてもよい。
【0008】
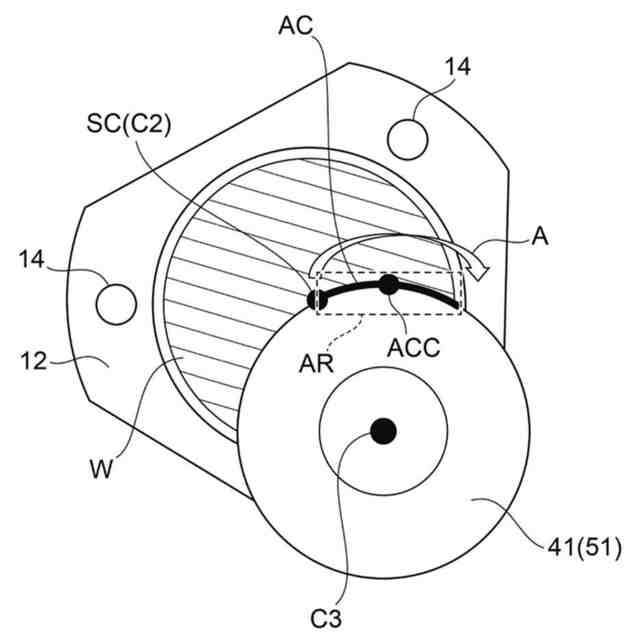
本開示の第2の態様に係る加工装置は、略円板形状のワークを回転可能に支持するチャックテーブルと、前記ワークを研削する砥石を回転可能に保持する研削部と、前記チャックテーブルを支持する支持体を含んで構成されるチャックテーブル支持機構とを備える。前記チャックテーブル支持機構の支持体の支持反力の作用点は、前記チャックテーブルの回転中心に対して偏心している。加えて、前記ワークの研削時における前記チャックテーブルの姿勢変動の方向と、前記砥石が前記ワークに接触する円弧状部分を含む加工領域の短手方向とが略一致するよう、前記研削部と前記チャックテーブルの位置関係が設定されている。なお、位置関係に加えて、チャックテーブル支持機構における各部材の配分が適宜設定されてもよい。
【発明の効果】
【0009】
本開示の第1の態様の加工装置によれば、砥石がワークに接触する円弧状部分を含む加工領域の両端部を除く部分に、チャックテーブル支持機構の支持体の支持反力の作用点が含まれるため、砥石からの外力に伴うチャックテーブルの姿勢の変動が抑制され、砥石とワークの当接具合の変動も抑制することができる。また、本開示の第2の態様の加工装置によれば、チャックテーブルの姿勢変動の方向と、砥石がワークに接触する円弧状部分を含む加工領域の短手方向とが一致するようにされているため、砥石の外力によりチャックテーブルの姿勢が変動したとしても、その変動による砥石とワークの当接具合の変動を抑制することができる。
【図面の簡単な説明】
【0010】
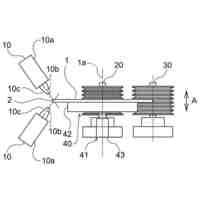
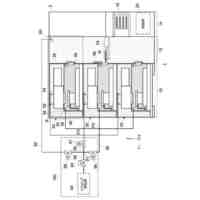
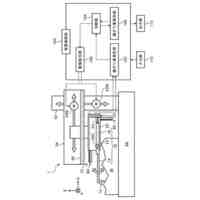
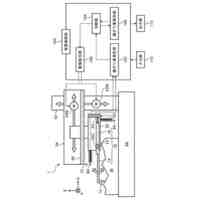
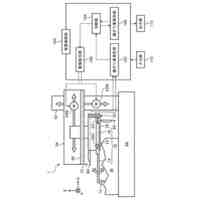
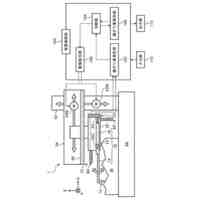
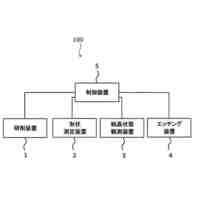
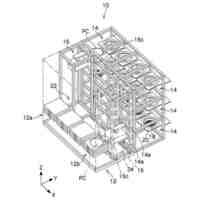
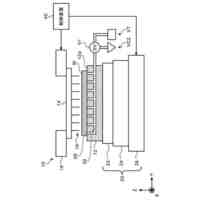
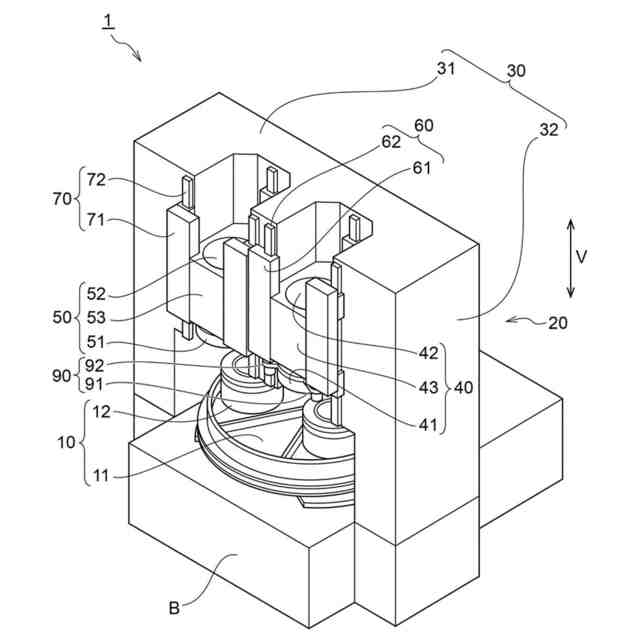
第1の実施の形態に係るウェハ研削加工装置1の概略構成を説明する斜視図である。
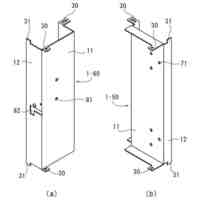
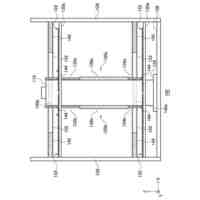
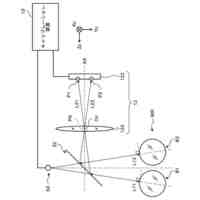
インデックステーブル11及びチャックテーブル12の構成を説明する平面図である。
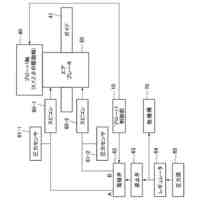
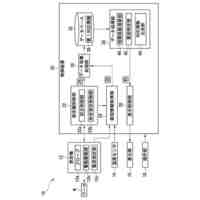
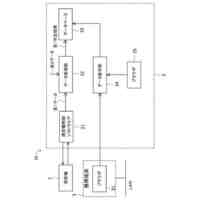
図1の加工装置1の制御部100の構成を説明するブロック図である。
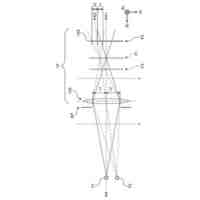
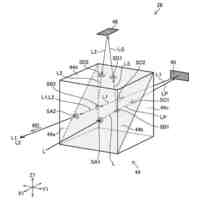
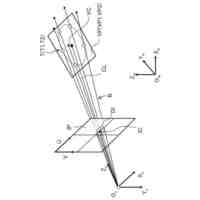
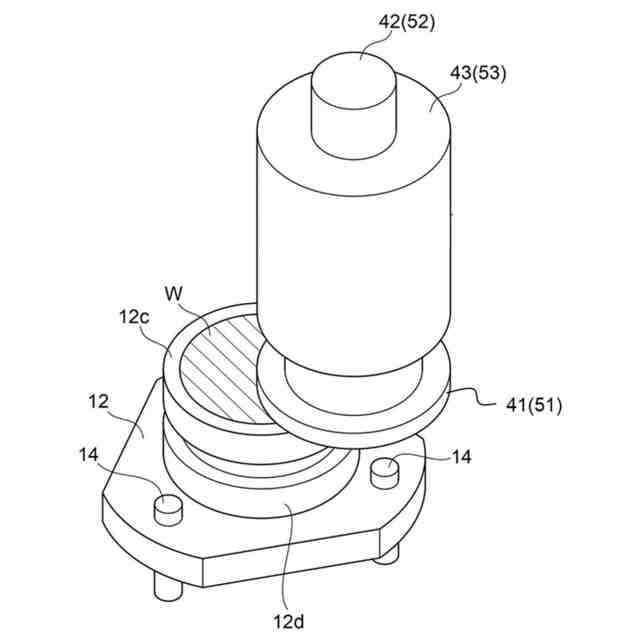
チャックテーブル12と粗研削部40又は精研削部50との位置関係について説明する概略斜視図である。
チャックテーブル12と粗研削部40又は精研削部50との位置関係について説明する平面図である。
従来の加工装置における、チャックテーブル12と粗研削部40又は精研削部50との位置関係の一例を示す斜視図である。
従来の加工装置における、チャックテーブル12と粗研削部40又は精研削部50との位置関係の一例を示す平面図である。
第2の実施の形態の加工装置における、チャックテーブル12と粗研削部40又は精研削部50との位置関係について説明する平面図である。
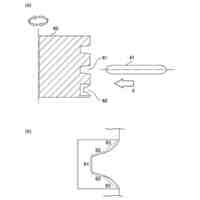
各種実施形態の変形例を示す。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東京精密
研削装置
27日前
株式会社東京精密
加工装置
10日前
株式会社東京精密
ロッカー
21日前
株式会社東京精密
プローバ
10日前
株式会社東京精密
加工装置
10日前
株式会社東京精密
プローバ
今日
株式会社東京精密
電池検査装置
今日
株式会社東京精密
レーザ加工装置
1か月前
株式会社東京精密
カーフ洗浄装置
1か月前
株式会社東京精密
スラリー供給装置
11日前
株式会社東京精密
検査装置、及び、検査方法
1か月前
株式会社東京精密
測定装置及び移動体の制御方法
今日
株式会社東京精密
測定機の管理方法及び管理装置
今日
株式会社東京精密
測定装置及び移動体の制御方法
今日
株式会社東京精密
CMP装置、及び、CMP方法
1か月前
株式会社東京精密
測定装置及び移動体の制御方法
今日
株式会社東京精密
測定装置及び移動体の制御方法
今日
株式会社東京精密
カメラのキャリブレーション方法
2か月前
株式会社東京精密
カメラのキャリブレーション方法
2か月前
株式会社東京精密
プローバ、及び、プローブ検査方法
20日前
株式会社東京精密
コントローラ、及び、監視システム
3日前
株式会社東京精密
校正データの管理方法及び形状測定機
2か月前
株式会社東京精密
ダイシング方法およびダイシングシステム
21日前
株式会社東京精密
非接触温度測定装置及び非接触温度測定方法
2か月前
株式会社東京精密
エッチングシステム、及び、エッチング方法
3日前
株式会社東京精密
スタイラス姿勢決定方法及びスタイラス姿勢決定装置
26日前
株式会社東京精密
加工装置
1か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
研削装置
1か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
光変調装置
27日前
株式会社東京精密
カメラのキャリブレーション方法及びキャリブレーション装置
2か月前
株式会社東京精密
ツルアー成形方法
1か月前
株式会社東京精密
チャックテーブル
2か月前
株式会社東京精密
吸着装置及びその制御方法
2か月前
株式会社東京精密
ウェーハ試験装置のチャックの表面処理方法及びウェーハ試験装置のチャック
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ