TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141633
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041652
出願日
2024-03-15
発明の名称
測定装置及び移動体の制御方法
出願人
株式会社東京精密
代理人
個人
,
個人
,
個人
,
個人
主分類
G01B
21/00 20060101AFI20250919BHJP(測定;試験)
要約
【課題】 移動体の移動に伴う不具合の発生を抑制可能な測定装置及び移動体の制御方法を提供する。
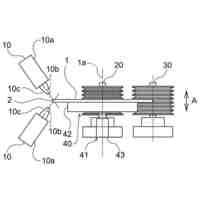
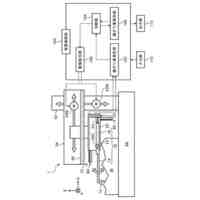
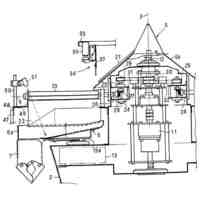
【解決手段】 移動体(10、10C、200、500)の制御方法は、測定装置(1、1A、1B、1C)に含まれる移動体に取り付けられ、移動体よりも剛性が低い衝突検出センサー(80、80A、82、82A、82B、90、202、210、512)の曲がり量を検出するステップと、曲がり量に応じて移動体の移動制御を行うステップとを備える。
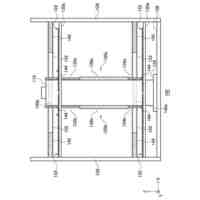
【選択図】 図1
特許請求の範囲
【請求項1】
測定装置内において相対移動する移動体と、
前記移動体に取り付けられ、前記移動体よりも剛性が低い衝突検出センサーと、
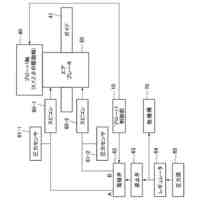
前記衝突検出センサーの曲がり量を検出し、前記曲がり量に応じて前記移動体の移動制御を行う装置制御部と、
を備える測定装置。
続きを表示(約 880 文字)
【請求項2】
前記衝突検出センサーは、前記移動体の運動方向にある障害物又は測定対象物よりも剛性が低い、請求項1に記載の測定装置。
【請求項3】
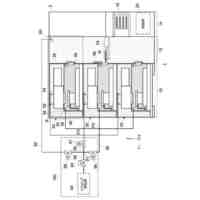
前記衝突検出センサーを複数備え、
前記装置制御部において、前記複数の衝突検出センサーの曲がり量の読み出し回路が共通である、請求項1に記載の測定装置。
【請求項4】
前記衝突検出センサーは、前記移動体の移動軸ごとに取り付けられており、
前記装置制御部は、前記移動軸ごとに、前記衝突検出センサーの曲がり量の読み出し回路を備える、請求項1に記載の測定装置。
【請求項5】
前記衝突検出センサーは、前記移動体の運動方向に対して、前記衝突検出センサーが曲がる曲げ感度方向が略直交する向きに取り付けられる、請求項1に記載の測定装置。
【請求項6】
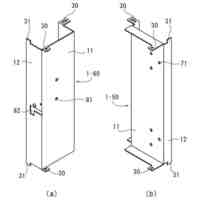
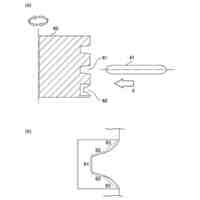
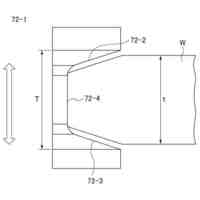
前記衝突検出センサーは、支持体と、前記支持体上に形成された感度部材とを含み、
前記感度部材は、引っ張り応力による抵抗値の変化割合が圧縮応力による抵抗値の変化割合よりも大きく、
前記衝突検出センサーは、前記支持体が前記移動体寄りになるように傾斜して取り付けられる、請求項1に記載の測定装置。
【請求項7】
前記衝突検出センサーは平面形状に形成されており、前記衝突検出センサーの平面が重力方向に略平行になるように取り付けられる、請求項1に記載の測定装置。
【請求項8】
前記衝突検出センサーの先端部が前記移動体側に固定される、請求項1に記載の測定装置。
【請求項9】
前記移動体の曲がり量の検出結果を通知する出力部を備える、請求項1に記載の測定装置。
【請求項10】
曲がったときに抵抗値が増加する前記衝突検出センサーを複数備え、
前記装置制御部は、複数の前記衝突検出センサーからの検出信号を直列に接続して読み出す読み出し回路を備える、請求項1に記載の測定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は測定装置及び移動体の制御方法に係り、特に他の物体に対する移動体の衝突を防止するための技術に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
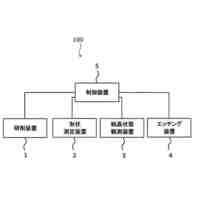
移動体を備える装置において移動体を移動させると、移動体が移動する範囲に存在する障害物に接触(衝突)する場合がある。例えば、粗さ測定機、輪郭測定機、真円度測定機、座標測定機又は光学式形状測定機等の測定機は、移動体として検出器(プローブヘッド)、キャリッジ又はコラム等を備えている。このような移動体の移動に伴い、本来意図しない部分が障害物(例えば、測定対象物も含む)に衝突し、測定機の故障又は精度低下の原因となる場合がある。また、移動体が測定対象物に衝突すると、測定対象物に損傷を与える場合がある。
【0003】
特許文献1には、移動対象装置を覆う筐体に生じた歪みを歪み検出センサーにより検出し、歪み検出センサーが検出した歪みが所定以上になった場合に移動手段を停止させる衝突防止装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2008-122222号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の衝突防止装置は、移動対象装置を覆う筐体が障害物に衝突して、筐体に歪みが生じることを前提としたものであり、上記のような測定機の故障又は精度低下の原因となりうる衝突を回避するものではなかった。また、筐体との衝突により測定対象物に損傷を与える場合があった。
【0006】
本発明はこのような事情に鑑みてなされたもので、移動体の移動に伴う不具合の発生を抑制可能な測定装置及び移動体の制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
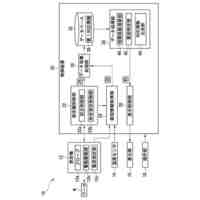
本発明の第1の態様に係る測定装置は、測定装置内において相対移動する移動体と、移動体に取り付けられ、移動体よりも剛性が低い衝突検出センサーと、衝突検出センサーの曲がり量を検出し、曲がり量に応じて移動体の移動制御を行う装置制御部とを備える。
【0008】
本発明の第2の態様に係る測定装置は、第1の態様において、衝突検出センサーは、移動体の運動方向にある障害物又は測定対象物よりも剛性が低い。
【0009】
本発明の第3の態様に係る測定装置は、第1又は第2の態様において、衝突検出センサーを複数備え、装置制御部において、複数の衝突検出センサーの曲がり量の読み出し回路が共通である。
【0010】
本発明の第4の態様に係る測定装置は、第1又は第2の態様において、衝突検出センサーは、移動体の移動軸ごとに取り付けられており、装置制御部は、移動軸ごとに、衝突検出センサーの曲がり量の読み出し回路を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東京精密
研削装置
27日前
株式会社東京精密
ロッカー
21日前
株式会社東京精密
プローバ
10日前
株式会社東京精密
加工装置
10日前
株式会社東京精密
加工装置
10日前
株式会社東京精密
プローバ
今日
株式会社東京精密
電池検査装置
今日
株式会社東京精密
レーザ加工装置
1か月前
株式会社東京精密
カーフ洗浄装置
1か月前
株式会社東京精密
スラリー供給装置
11日前
株式会社東京精密
検査装置、及び、検査方法
1か月前
株式会社東京精密
測定機の管理方法及び管理装置
今日
株式会社東京精密
測定装置及び移動体の制御方法
今日
株式会社東京精密
測定装置及び移動体の制御方法
今日
株式会社東京精密
CMP装置、及び、CMP方法
1か月前
株式会社東京精密
測定装置及び移動体の制御方法
今日
株式会社東京精密
測定装置及び移動体の制御方法
今日
株式会社東京精密
プローバ、及び、プローブ検査方法
20日前
株式会社東京精密
コントローラ、及び、監視システム
3日前
株式会社東京精密
ダイシング方法およびダイシングシステム
21日前
株式会社東京精密
エッチングシステム、及び、エッチング方法
3日前
株式会社東京精密
非接触温度測定装置及び非接触温度測定方法
2か月前
株式会社東京精密
スタイラス姿勢決定方法及びスタイラス姿勢決定装置
26日前
株式会社東京精密
加工装置
1か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
研削装置
1か月前
株式会社東京精密
プローバ
1か月前
株式会社東京精密
光変調装置
27日前
株式会社東京精密
ツルアー成形方法
1か月前
株式会社東京精密
ウェーハ試験装置のチャックの表面処理方法及びウェーハ試験装置のチャック
今日
株式会社東京精密
面取り研削方法及び面取り研削装置
18日前
大和製衡株式会社
組合せ秤
3日前
大和製衡株式会社
組合せ秤
3日前
株式会社東芝
センサ
3日前
トヨタ自動車株式会社
表示装置
12日前
トヨタ自動車株式会社
検査装置
今日
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ