TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025111156
公報種別
公開特許公報(A)
公開日
2025-07-30
出願番号
2024005385
出願日
2024-01-17
発明の名称
校正データの管理方法及び形状測定機
出願人
株式会社東京精密
代理人
個人
,
個人
,
個人
,
個人
主分類
G01B
21/00 20060101AFI20250723BHJP(測定;試験)
要約
【課題】プローブの校正データの良否を容易に判定可能な校正データの管理方法及び形状測定機を提供する。
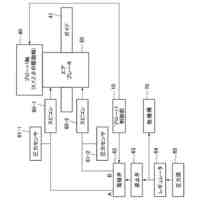
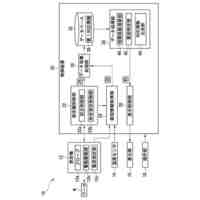
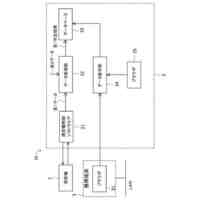
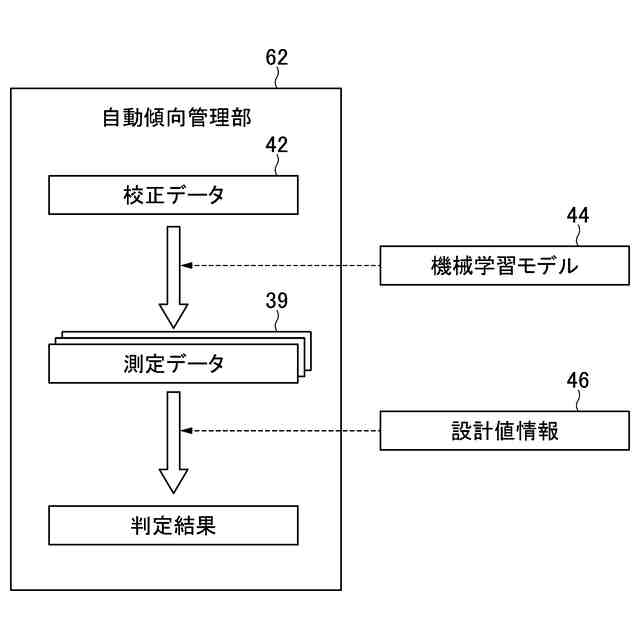
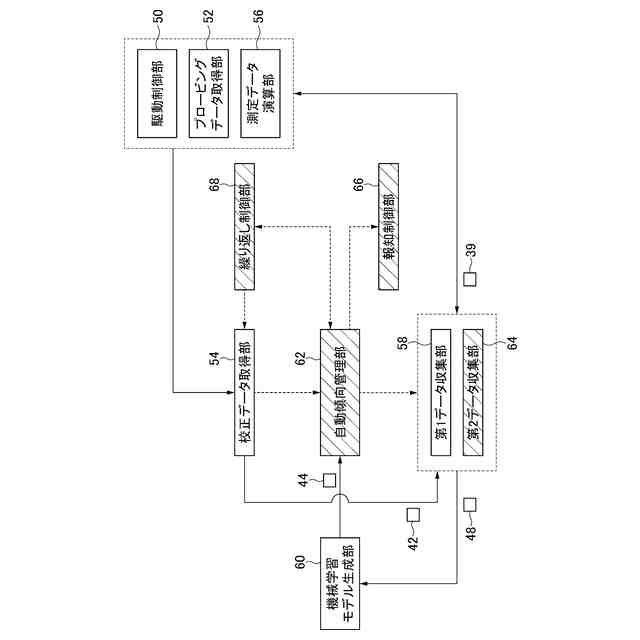
【解決手段】プローブ26の新たな校正データ42を取得する校正データ取得ステップ(校正データ取得部54)と、校正データ取得ステップで取得した校正データ42に基づいて、校正データ42を入力として測定データ39を出力とする機械学習モデル44を用いて、測定データ39を予測する予測ステップ(自動傾向管理部62)と、予測ステップで予測した測定データ39と、ワークWの設計値情報46とに基づいて、校正データ取得ステップで取得した校正データ42の良否を判定する判定ステップ(自動傾向管理部62)と、を有する。
【選択図】図16
特許請求の範囲
【請求項1】
座標測定用のプローブを備え、予め定められた測定プランに従ってプローブでワークの1以上の測定項目を測定して得られたプロービング点の座標値と、前記プローブの校正データとに基づいて、前記測定プランの前記測定項目に対応した前記ワークの測定データを取得する形状測定機における、前記校正データの管理方法において、
前記プローブの新たな前記校正データを取得する校正データ取得ステップと、
前記校正データ取得ステップで取得した前記校正データに基づいて、前記校正データを入力として前記測定データを出力とする機械学習モデルを用いて、前記測定データを予測する予測ステップと、
前記予測ステップで予測した前記測定データと、前記ワークの設計値情報とに基づいて、前記校正データ取得ステップで取得した前記校正データの良否を判定する判定ステップと、
を有する校正データの管理方法。
続きを表示(約 1,900 文字)
【請求項2】
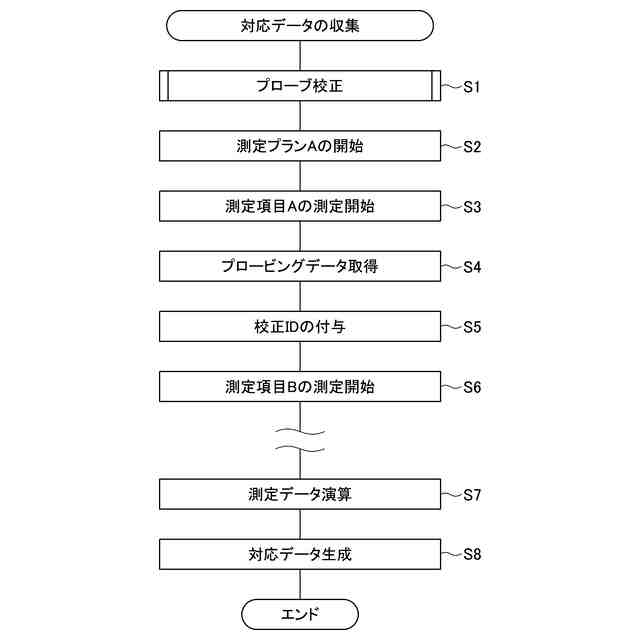
前記測定プランに従って前記形状測定機で前記測定データを複数取得して、前記測定データと、前記形状測定機が前記測定データの取得に用いた前記校正データと、を対応付けた第1対応データを複数収集する第1データ収集ステップと、
前記第1データ収集ステップで収集した複数の前記第1対応データに基づいて、前記機械学習モデルを生成する機械学習モデル生成ステップと、
を有し、
前記予測ステップでは、前記機械学習モデル生成ステップで生成した前記機械学習モデルを用いて前記測定データを予測する請求項1に記載の校正データの管理方法。
【請求項3】
前記測定プランが複数であり、
前記第1データ収集ステップでは、前記測定プランごとに複数の前記第1対応データを収集し、
前記機械学習モデル生成ステップでは、前記測定プランごとに前記機械学習モデルを生成し、
前記予測ステップでは、前記測定プランごとに前記校正データを前記測定プランに対応した前記機械学習モデルに入力して、前記測定プランごとに前記測定データを予測し、
前記判定ステップでは、前記予測ステップで予測した前記測定プランごとの前記測定データと、前記設計値情報とに基づいて、前記校正データの良否を判定する請求項2に記載の校正データの管理方法。
【請求項4】
前記判定ステップで前記校正データを良と判定した場合に、前記測定プランに従って前記形状測定機で前記測定データを取得する測定ステップと、
前記測定ステップで測定した前記測定データと、前記判定ステップで良と判定した前記校正データと、を対応付けた第2対応データを収集する第2データ収集ステップと、
前記第2データ収集ステップで収集した前記第2対応データに基づいて、前記測定プランに対応した前記機械学習モデルの再学習を実行する再学習ステップと、
を有する請求項3に記載の校正データの管理方法。
【請求項5】
前記判定ステップで前記校正データを良と判定した場合に、前記測定プランに従って前記形状測定機で前記測定データを取得する測定ステップと、
前記測定ステップで測定した前記測定データと、前記判定ステップで良と判定した前記校正データと、を対応付けた第2対応データを収集する第2データ収集ステップと、
前記第2データ収集ステップで収集した前記第2対応データに基づいて、前記機械学習モデルの再学習を実行する再学習ステップと、
を有する請求項1に記載の校正データの管理方法。
【請求項6】
前記判定ステップで前記校正データを否と判定した場合に、前記校正データ取得ステップ、前記予測ステップ及び前記判定ステップを繰り返し実行する請求項1から5のいずれか1項に記載の校正データの管理方法。
【請求項7】
前記判定ステップで前記校正データを否と判定した場合に、警告情報を報知する報知ステップを有する請求項1から5のいずれか1項に記載の校正データの管理方法。
【請求項8】
座標測定用のプローブを備え、予め定められた測定プランに従ってプローブでワークの1以上の測定項目を測定して得られたプロービング点の座標値と、前記プローブの校正データとに基づいて、前記測定プランの前記測定項目に対応した前記ワークの測定データを取得する形状測定機において、
前記プローブの新たな前記校正データを取得する校正データ取得部と、
前記校正データ取得部が取得した前記校正データに基づいて、前記校正データを入力として前記測定データを出力とする機械学習モデルを用いて、前記測定データを予測する予測部と、
前記予測部が予測した前記測定データと、前記ワークの設計値情報とに基づいて、前記校正データ取得部が取得した前記校正データの良否を判定する判定部と、
を備える形状測定機。
【請求項9】
前記測定プランに従って前記測定データを複数取得して、前記測定データと、前記形状測定機が前記測定データの取得に用いた前記校正データと、を対応付けた第1対応データを複数収集する第1データ収集部と、
前記第1データ収集部が収集した複数の前記第1対応データに基づいて、前記機械学習モデルを生成する機械学習モデル生成部と、
を備え、
前記予測部は、前記機械学習モデル生成部が生成した前記機械学習モデルを用いて前記測定データを予測する請求項8に記載の形状測定機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、形状測定機のプローブの校正データの管理方法、及び形状測定機に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
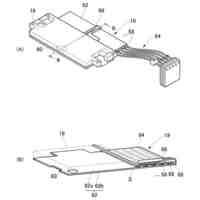
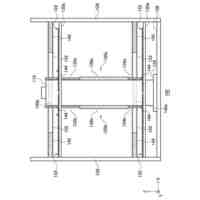
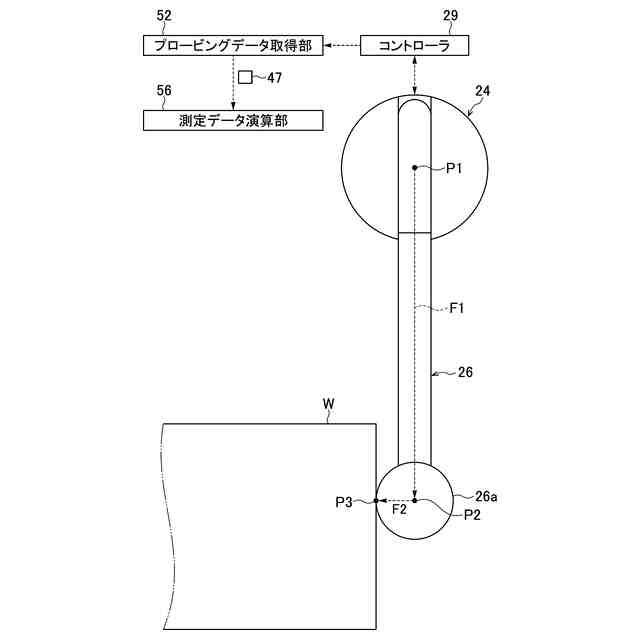
従来、プローブの位置及び姿勢を変位させる駆動部を有し、このプローブをワーク(被測定物)に形成されている複数の測定要素(例えば直線、円穴、平面、球等)にそれぞれ接触(プロービング)させることにより、測定要素の寸法及び形状等の様々な測定を実行する三次元座標測定機(形状測定機)が知られている。この三次元座標測定機は、予め定められた測定プランに従ってプローブでワークの測定要素の1以上の測定項目(半径、直径、真円度等)を測定して得られたプロービング点の座標値と、プローブの校正データとに基づいて、測定項目に対応したワークの測定データを取得する(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-162166号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
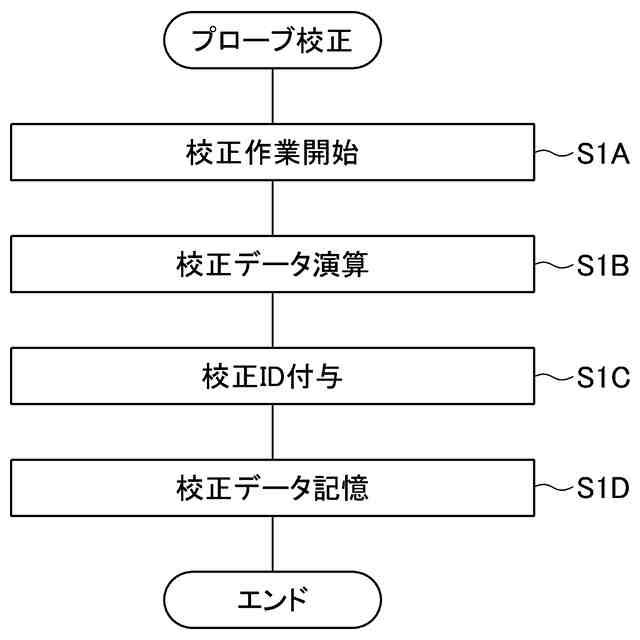
特許文献1に記載の三次元座標測定機では、プローブの校正作業及び校正データの取得を定期的に実行する。この際に、従来ではユーザが校正データ(XYZ方向のオフセット量、プローブ径など)の閾値等を設定して、新たに取得した校正データとその閾値とを比較することで、この校正データの良否及び傾向等を管理していた。しかしながら、この場合には、閾値の設定方法が定められていないので、ユーザはどのような閾値を設定すればよいのかが分からない。また、ユーザにとっては校正データの閾値の設定自体が煩雑である。
【0005】
本発明はこのような事情に鑑みてなされたものであり、プローブの校正データの良否を容易に判定可能な校正データの管理方法及び形状測定機を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の目的を達成するための校正データの管理方法は、座標測定用のプローブを備え、予め定められた測定プランに従ってプローブでワークの1以上の測定項目を測定して得られたプロービング点の座標値と、プローブの校正データとに基づいて、測定プランの測定項目に対応したワークの測定データを取得する形状測定機における、校正データの管理方法において、プローブの新たな校正データを取得する校正データ取得ステップと、校正データ取得ステップで取得した校正データに基づいて、校正データを入力として測定データを出力とする機械学習モデルを用いて、測定データを予測する予測ステップと、予測ステップで予測した測定データと、ワークの設計値情報とに基づいて、校正データ取得ステップで取得した校正データの良否を判定する判定ステップと、を有する。
【0007】
この校正データの管理方法によれば、ユーザが校正データの閾値設定を行うことなく、校正データの良否判定を自動で行うことができる。
【0008】
本発明の他の態様に係る校正データの管理方法において、測定プランに従って形状測定機で測定データを複数取得して、測定データと、形状測定機が測定データの取得に用いた校正データと、を対応付けた第1対応データを複数収集する第1データ収集ステップと、第1データ収集ステップで収集した複数の第1対応データに基づいて、機械学習モデルを生成する機械学習モデル生成ステップと、を有し、予測ステップでは、機械学習モデル生成ステップで生成した機械学習モデルを用いて測定データを予測する。これにより、機械学習モデルを生成することができる。
【0009】
本発明の他の態様に係る校正データの管理方法において、測定プランが複数であり、第1データ収集ステップでは、測定プランごとに複数の第1対応データを収集し、機械学習モデル生成ステップでは、測定プランごとに機械学習モデルを生成し、予測ステップでは、測定プランごとに校正データを測定プランに対応した機械学習モデルに入力して、測定プランごとに測定データを予測し、判定ステップでは、予測ステップで予測した測定プランごとの測定データと、設計値情報とに基づいて、校正データの良否を判定する。これにより、校正データの良否を容易に判定することができる。
【0010】
本発明の他の態様に係る校正データの管理方法において、判定ステップで校正データを良と判定した場合に、測定プランに従って形状測定機で測定データを取得する測定ステップと、測定ステップで測定した測定データと、判定ステップで良と判定した校正データと、を対応付けた第2対応データを収集する第2データ収集ステップと、第2データ収集ステップで収集した第2対応データに基づいて、測定プランに対応した機械学習モデルの再学習を実行する再学習ステップと、を有する。機械学習モデルの再学習を行うことで、測定データの予測精度、すなわち校正データの良否の判定精度を向上させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東京精密
プローバ
6日前
株式会社東京精密
プローバ
5日前
株式会社東京精密
ロッカー
1か月前
株式会社東京精密
加工装置
今日
株式会社東京精密
プローバ
19日前
株式会社東京精密
加工装置
今日
株式会社東京精密
プローバ
今日
株式会社東京精密
加工装置
19日前
株式会社東京精密
加工装置
19日前
株式会社東京精密
プローバ
9日前
株式会社東京精密
加工方法
今日
株式会社東京精密
研削装置
1か月前
株式会社東京精密
加工装置
5日前
株式会社東京精密
電池検査装置
9日前
株式会社東京精密
レーザ加工装置
1か月前
株式会社東京精密
カーフ洗浄装置
2か月前
株式会社東京精密
ハブレスブレード
今日
株式会社東京精密
スラリー供給装置
20日前
株式会社東京精密
校正方法及び校正装置
5日前
株式会社東京精密
ウェーハセンシング装置
今日
株式会社東京精密
検査装置、及び、検査方法
1か月前
株式会社東京精密
面取り装置及び面取り方法
今日
株式会社東京精密
測定装置及び移動体の制御方法
9日前
株式会社東京精密
測定機の管理方法及び管理装置
9日前
株式会社東京精密
内径測定装置及びそのシステム
5日前
株式会社東京精密
測定装置及び移動体の制御方法
9日前
株式会社東京精密
CMP装置、及び、CMP方法
1か月前
株式会社東京精密
測定装置及び移動体の制御方法
9日前
株式会社東京精密
測定装置及び移動体の制御方法
9日前
株式会社東京精密
カメラのキャリブレーション方法
2か月前
株式会社東京精密
カメラのキャリブレーション方法
2か月前
株式会社東京精密
プローバおよびウェーハ冷却方法
今日
株式会社東京精密
加工装置、搬送装置、及び搬送方法
今日
株式会社東京精密
プローバ、及び、プローブ検査方法
29日前
株式会社東京精密
コントローラ、及び、監視システム
12日前
株式会社東京精密
校正データの管理方法及び形状測定機
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ