TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025136764
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024035591
出願日
2024-03-08
発明の名称
磁気軸受装置、ターボ分子ポンプおよび磁気軸受部の制御方法
出願人
エドワーズ株式会社
代理人
弁理士法人瑛彩知的財産事務所
主分類
F16C
32/04 20060101AFI20250911BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】諸特性値が記録されていない場合であっても、諸特性値が調整された状態で回転体を運転することができる。
【解決手段】回転体と、回転体を磁力で空中に浮上させるとともに支持する磁気軸受部と、磁気軸受部の駆動を制御する制御部と、を備え、制御部は、磁気軸受部をチューニングするチューニング部と、当該磁気軸受装置の電源の状態を検知する電源検知部と、回転体が静止浮上状態であるか否かを検知する静止浮上検知部と、を備え、チューニング部は、(A)電源検知部が、磁気軸受装置の電源がOFFからONに切り替わったことを検知した場合と、(B)静止浮上検知部が、回転体が静止浮上状態であることを検知した場合と、の少なくともいずれかに磁気軸受部のチューニングを実行するように構成されている。磁気軸受装置。
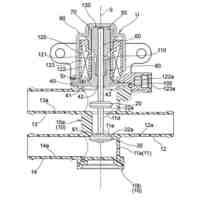
【選択図】図12
特許請求の範囲
【請求項1】
磁気軸受装置であって、
回転体と、
前記回転体を磁力で空中に浮上させるとともに支持する磁気軸受部と、
前記磁気軸受部の駆動を制御する制御部と、
を備え、
前記制御部は、
前記磁気軸受部をチューニングするチューニング部と、
当該磁気軸受装置の電源の状態を検知する電源検知部と、
前記回転体が静止浮上状態であるか否かを検知する静止浮上検知部と、
を備え、
前記チューニング部は、
(A)前記電源検知部が、前記磁気軸受装置の電源がOFFからONに切り替わったことを検知した場合と、
(B)前記静止浮上検知部が、前記回転体が前記静止浮上状態であることを検知した場合と、
の少なくともいずれかに前記磁気軸受部のチューニングを実行するように構成されている、
磁気軸受装置。
続きを表示(約 1,400 文字)
【請求項2】
前記制御部は、前記回転体が回転しているか否かを検知する回転検知部を備え、
前記チューニング部は、前記回転検知部が、前記回転体が回転している状態から回転していない状態になったことを検知した場合であって、前記静止浮上検知部が、前記回転体が前記静止浮上状態であることを検知した場合に、前記磁気軸受部のチューニングを実行するように構成されている、
請求項1に記載の磁気軸受装置。
【請求項3】
前記チューニング部は、(A)前記電源検知部が、当該磁気軸受装置の電源がOFFからONに切り替わったことを検知した場合であって、(B)前記静止浮上検知部が、前記回転体が前記静止浮上状態であることを検知した場合に、前記磁気軸受部のチューニングを実行するように構成されている、
請求項1に記載の磁気軸受装置。
【請求項4】
前記制御部は、前記磁気軸受部と前記制御部との接続が解除されたか否かを検知するように構成された接続検出部を備え、
前記チューニング部は、前記電源検知部が、前記磁気軸受装置の電源がONの状態を検知している場合であって、(C)前記接続検出部が、前記磁気軸受部と前記制御部との接続が解除されたことを検出した場合に、前記磁気軸受部のチューニングを実行するように構成されている、
請求項1に記載の磁気軸受装置。
【請求項5】
前記チューニング部は、前記回転体の周囲に配置された周辺部品に対する前記回転体の位置に関連する情報に基づいて、前記回転体の回転基準位置を調整するように構成されている、
請求項1に記載の磁気軸受装置。
【請求項6】
前記回転体および前記磁気軸受部を備え、
前記回転体の少なくとも一部にガスを排気するための回転翼を有するポンプユニットと、
前記制御部を備える制御ユニットと、
を備える、
請求項1~5のいずれか1項に記載のターボ分子ポンプ。
【請求項7】
前記ポンプユニットと前記制御ユニットとを接続するための配線部を備え、
前記ポンプユニットは前記配線部の一端が接続するポンプ側接続部を備え、前記制御ユニットは前記配線部の他端が接続する制御側接続部を備える、
請求項6に記載のターボ分子ポンプ。
【請求項8】
前記ポンプユニットは、当該ポンプユニットを動作させるための制御情報が記憶された記憶部を備えない、
請求項6に記載のターボ分子ポンプ。
【請求項9】
前記ポンプユニットは、当該ポンプユニットの個体を識別する個体識別情報が記憶された記憶部を備えない、
請求項8に記載のターボ分子ポンプ。
【請求項10】
回転体を磁力で空中に浮上させるとともに支持する磁気軸受部の制御方法であって、
前記磁気軸受部の駆動を制御する制御部を用いて、
(A)前記回転体と前記磁気軸受部と前記制御部とを備える磁気軸受装置の電源がOFFからONに切り替わったことを検知した場合と、
(B)前記回転体が静止浮上状態であることを検知した場合と、
の少なくともいずれかに前記磁気軸受部のチューニングを実行する、
磁気軸受部の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本出願は、磁気軸受装置、ターボ分子ポンプおよび磁気軸受部の制御方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
本技術分野の背景技術として、特開2000-240649号公報(特許文献1)がある。この公報には、「磁気軸受本体20は機種特定用の抵抗412と、機種と諸特性値が格納された本体EEP-ROM411を備える。制御装置40は機種と諸特性が格納された装置EEP-ROM401と、複数の機種に対応する諸特性が格納されたROMテーブル402を備える。制御部400は、本体EEP-ROM411と装置EEP-ROM401の両諸特性は正常だが、両諸特性が同一でない場合、装置EEP-ROM401を本体EEP-ROM411の内容に更新する」と記載されている(要約参照)。
【先行技術文献】
【特許文献】
【0003】
特開2000-240649号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の構成によると、磁気軸受本体20の機種が変更されても、自動的に諸特性の調整が行われ、専門の技術者による調整が不要になる。しかしながら、本体と制御装置の両方においてEEP-ROMに諸特性を記録しておく必要がある。
【課題を解決するための手段】
【0005】
上記課題を解決するために、例えば特許請求の範囲に記載の構成を採用する。
本願は上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、
磁気軸受装置であって、
回転体と、
前記回転体を磁力で空中に浮上させるとともに支持する磁気軸受部と、
前記磁気軸受部の駆動を制御する制御部と、
を備え、
前記制御部は、
前記磁気軸受部をチューニングするチューニング部と、
当該磁気軸受装置の電源の状態を検知する電源検知部と、
前記回転体が静止浮上状態であるか否かを検知する静止浮上検知部と、
を備え、
前記チューニング部は、
(A)前記電源検知部が、前記磁気軸受装置の電源がOFFからONに切り替わったことを検知した場合と、
(B)前記静止浮上検知部が、前記回転体が前記静止浮上状態であることを検知した場合と、
の少なくともいずれかに前記磁気軸受部のチューニングを実行するように構成されている。
【発明の効果】
【0006】
本発明によれば、諸特性値が記録されていない場合であっても、諸特性値が調整された状態で回転体を運転することができる。
上記した以外の課題、構成および効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0007】
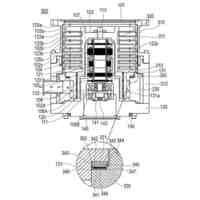
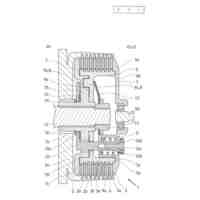
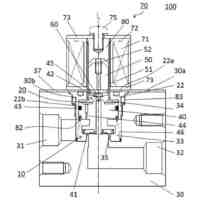
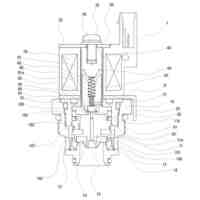
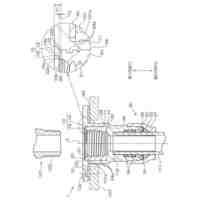
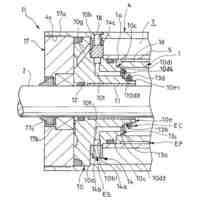
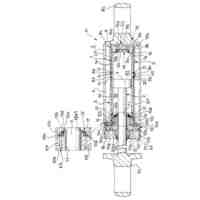
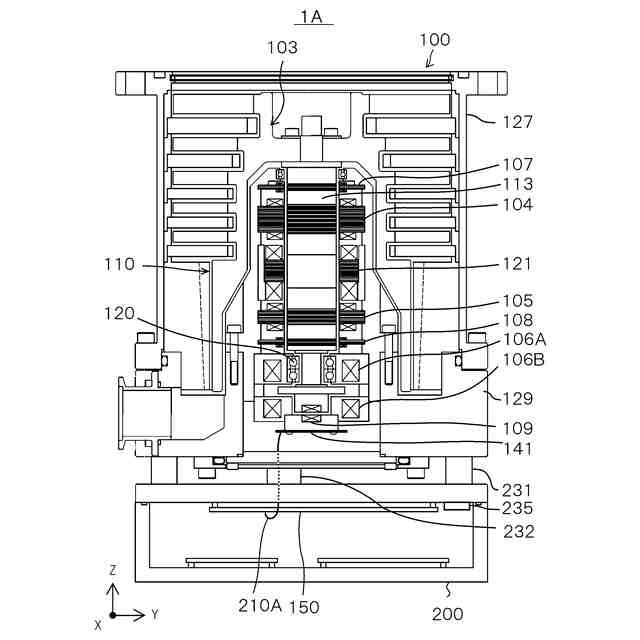
図1は、ターボ分子ポンプの縦断面図の一例である。
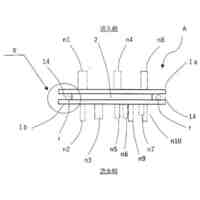
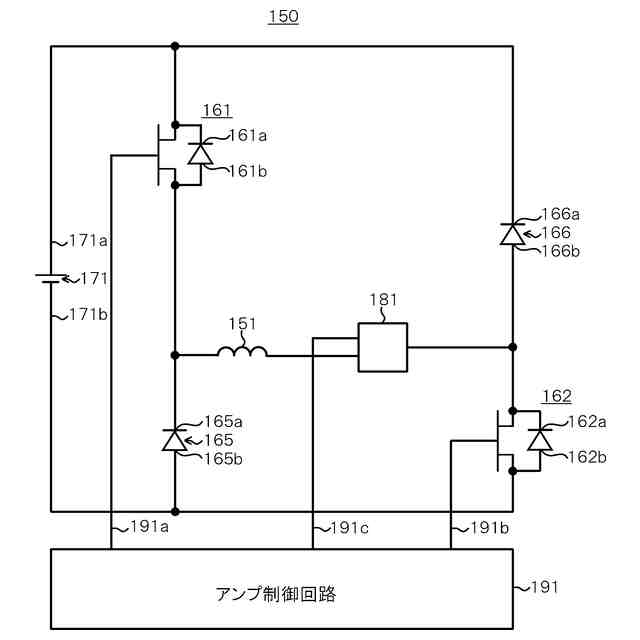
図2は、ターボ分子ポンプのロータ軸制御のためのアンプ回路の回路図の一例である。
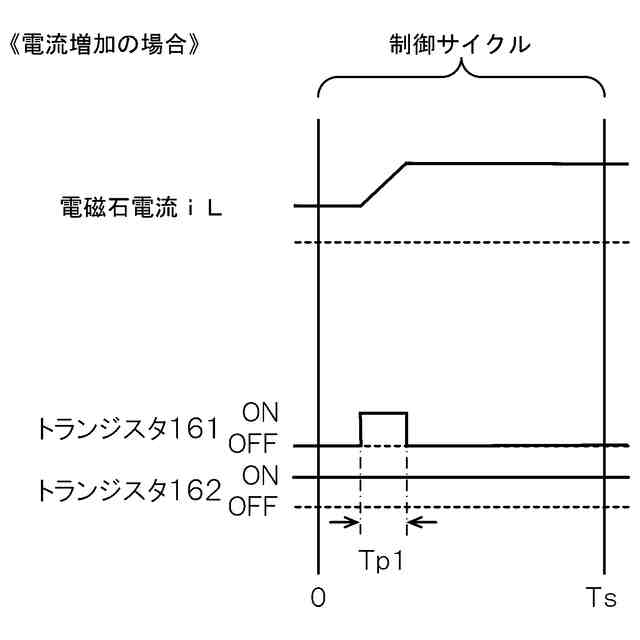
図3は、電流指令値が検出値より大きい場合の制御を示すタイムチャートの一例である。
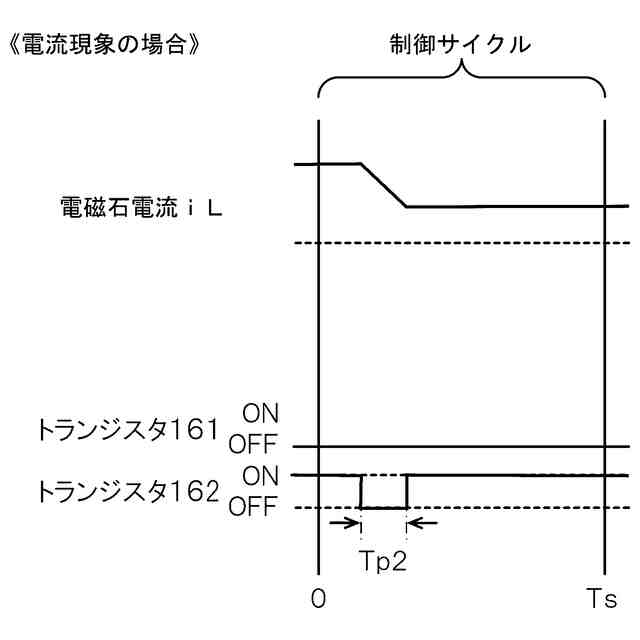
図4は、電流指令値が検出値より小さい場合の制御を示すタイムチャートの一例である。
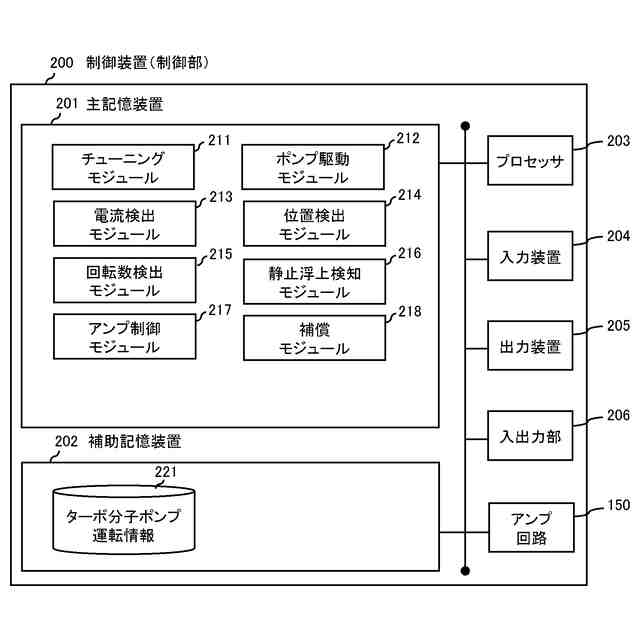
図5は、一実施形態に係る制御装置のハードウェア構成の一例である。
図6は、一実施形態に係るターボ分子ポンプの情報の流れを示す図である。
図7は、一実施形態に係るターボ分子ポンプの運転全体フロー図である。
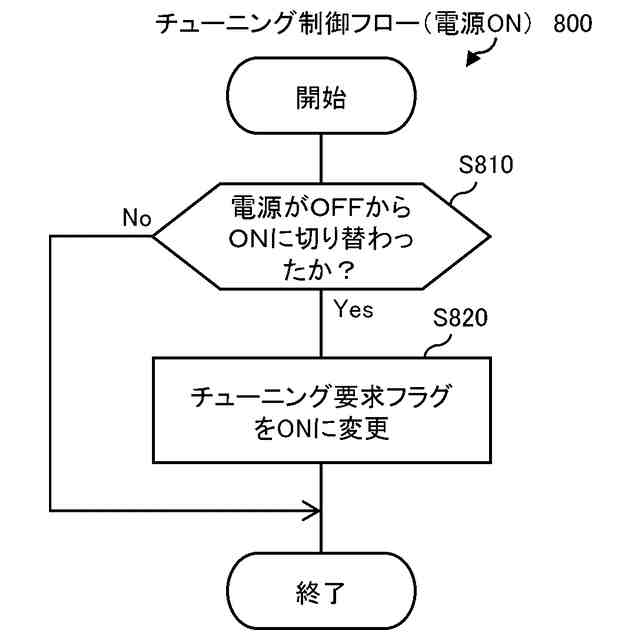
図8は、一実施形態に係るチューニング制御フロー(電源ON)である。
図9は、一実施形態に係るチューニング制御フロー(静止浮上)である。
図10は、一実施形態に係る静止浮上状態判定フローである。
図11は、他の実施形態に係るチューニング制御フロー(静止浮上)である。
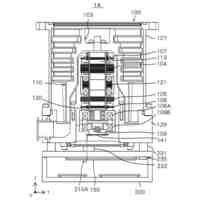
図12は、他の実施形態に係るターボ分子ポンプの縦断面図の一例である。
図13は、一実施形態に係る制御装置のハードウェア構成の一例である。
図14は、ターボ分子ポンプの分解検出部を構成する回路の一例を示すブロック図である。
図15は、他の実施形態に係るチューニング制御フロー(電源ON)である。
【発明を実施するための形態】
【0008】
以下、一実施形態に係る真空ポンプについて、図面に基づいて説明する。一部の図面には、X軸、Y軸、およびZ軸を示しており、各軸は各図面で共通する方向となるように描かれている。ただし、これらは説明の便宜上の方向に過ぎず、真空ポンプの設置態様を何ら限定するものではない。また、同一部材について、一の図面において部材に符号を付して、他の図面において符号を省略することがある。
【0009】
[実施形態1]
<ターボ分子ポンプの基本構成>
図1は、真空ポンプの一例であるターボ分子ポンプ1の基本構成を示す。ターボ分子ポンプ1は、概して、ポンプ本体100と、制御装置200と、を備える。このターボ分子ポンプ1は、図1の上方が上流(吸気)側となっており、吸気口101には、例えば、半導体製造装置等の対象機器の真空チャンバ(図示略)が接続されるようになっている。また、ターボ分子ポンプ1は、図1の下方が下流(排気)側となっており、排気口133には、例えば、補助ポンプ(図示略)が接続されるようになっている。このターボ分子ポンプ1は、図1に示すような鉛直方向の垂直姿勢のほか、逆鉛直姿勢や水平姿勢、傾斜姿勢でも使用することができる。
【0010】
このターボ分子ポンプ1の縦断面図を図1に示す。また、ターボ分子ポンプ1における情報の流れを図6に示す。図1において、ポンプ本体100は、円筒状の外筒127の上端に吸気口101が形成されている。そして、外筒127の内方には、ガスを吸引排気するためのタービンブレードである複数の回転翼102(102a、102b、102c・・・)を周部に放射状かつ多段に形成した回転体103が備えられている。この回転体103の中心にはロータ軸113が取り付けられており、このロータ軸113は、例えば5軸制御の磁気軸受により空中に浮上支持かつ位置制御されている。回転体103は、一般的に、アルミニウム又はアルミニウム合金などの金属によって構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
エドワーズ株式会社
真空ポンプ
3日前
エドワーズ株式会社
真空ポンプ、及び真空ポンプ構成部品
3日前
エドワーズ株式会社
真空ポンプ、及び真空ポンプ構成部品
1か月前
エドワーズ株式会社
磁気軸受装置、ターボ分子ポンプおよび磁気軸受部の制御方法
9日前
個人
流路体
8か月前
個人
鍋虫ねじ
1か月前
個人
回転伝達機構
1か月前
個人
紛体用仕切弁
1か月前
個人
ホース保持具
5か月前
個人
クラッチ装置
8か月前
個人
差動歯車用歯形
3か月前
個人
トーションバー
5か月前
個人
ジョイント
9日前
個人
固着具と成形品部材
8か月前
個人
ナット
10日前
個人
回転式配管用支持具
7か月前
株式会社不二工機
電磁弁
4か月前
個人
地震の揺れ回避装置
2か月前
株式会社不二工機
電磁弁
2か月前
個人
ボルトナットセット
6か月前
株式会社アイシン
駆動装置
8か月前
個人
吐出量監視装置
26日前
株式会社オンダ製作所
継手
7か月前
カヤバ株式会社
緩衝器
8か月前
株式会社ミクニ
弁装置
7か月前
柿沼金属精機株式会社
分岐管
1か月前
株式会社三協丸筒
枠体
6か月前
カヤバ株式会社
緩衝器
6か月前
個人
ベルトテンショナ
6か月前
カヤバ株式会社
ダンパ
3か月前
株式会社ミクニ
弁装置
7か月前
カヤバ株式会社
緩衝器
8か月前
カヤバ株式会社
ダンパ
3か月前
カヤバ株式会社
緩衝器
2か月前
カヤバ株式会社
緩衝器
2か月前
個人
固着具と固着具の固定方法
7か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ