TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141896
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2025038743
出願日
2025-03-11
発明の名称
移載システム及び移載方法
出願人
株式会社日本キャリア工業
代理人
主分類
B65G
47/91 20060101AFI20250919BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】物品を移載する移載システムの製造コストの低減を図りつつも、物品を安定してピックアップできるようにする。
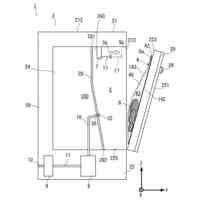
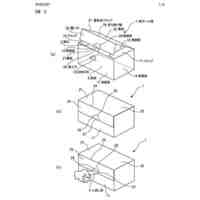
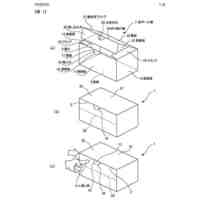
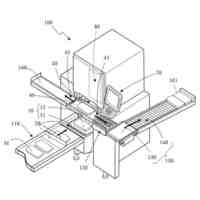
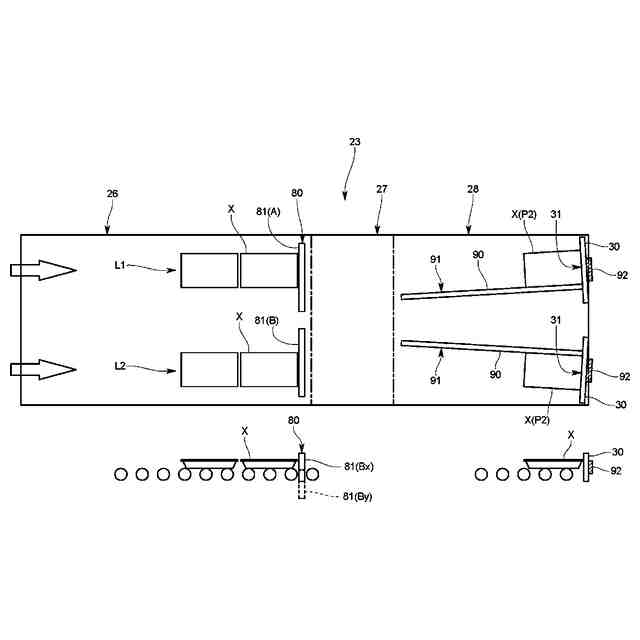
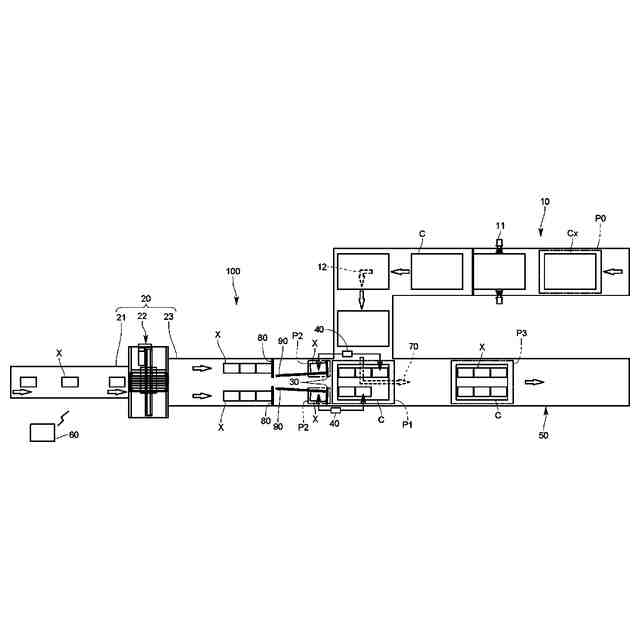
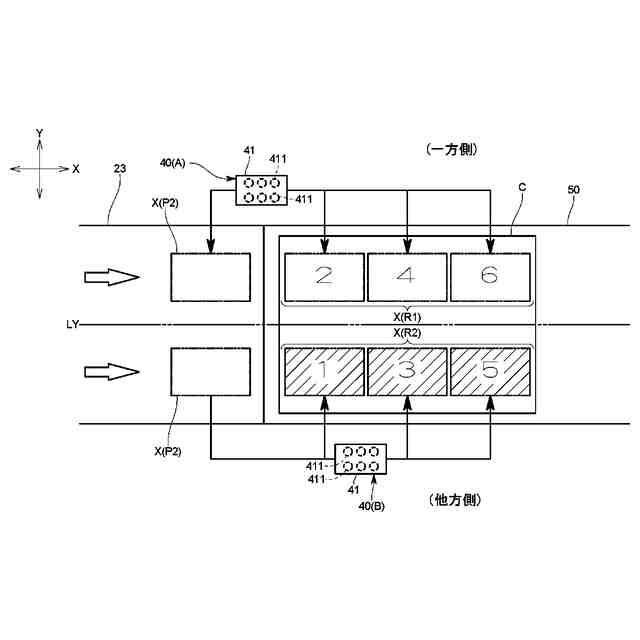
【解決手段】食品を包装してなる物品Xを、所定のピッキング位置P2に搬送する搬送機構20と、物品Xをピッキング位置P2で停止させる停止手段30と、ピッキング位置P2で停止している物品Xをピックアップして、所定の移載位置P1に搬送されたケースCに移載する移載ロボット40と、搬送機構20によってピッキング位置P2に順次搬送される複数の物品Xのうち、先行する物品Xを、後続の物品Xから離す分離手段80とを具備するようにした。
【選択図】図6
特許請求の範囲
【請求項1】
食品を包装してなる物品を、所定のピッキング位置に搬送する搬送機構と、
前記物品を前記ピッキング位置で停止させる停止手段と、
前記ピッキング位置で停止している前記物品をピックアップして、所定の移載位置に搬送されたケースに移載する移載ロボットと、
前記搬送機構によって前記ピッキング位置に順次搬送される複数の前記物品のうち、先行する物品を、後続の物品から離す分離手段とを具備することを特徴とする移載システム。
続きを表示(約 1,000 文字)
【請求項2】
前記分離手段が、前記先行する物品と前記後続の物品との間に介在して前記後続の物品の移動を規制する規制位置と、前記規制位置から退避して前記後続の物品の移動を可能とする非規制位置との間を移動するストッパを有していることを特徴とする請求項1記載の移載システム。
【請求項3】
前記搬送機構が、前記物品の搬送方向に沿って配列された複数の搬送ローラを有し、
前記ストッパが、互いに隣り合う前記搬送ローラの間に昇降可能に設けられていることを特徴とする請求項2記載の移載システム。
【請求項4】
前記ストッパが前記規制位置から前記非規制位置に移動して、当該ストッパにより移動が規制されていた先頭の物品が移動する際に、後続の物品の移動を規制する補助ストッパをさらに有していることを特徴とする請求項2記載の移載システム。
【請求項5】
前記搬送機構が、前記物品の搬送方向に沿って配列された複数の搬送ローラを有し、
前記ストッパが、前記規制位置においても前記非規制位置においても、前記搬送ローラよりも上方に位置していることを特徴とする請求項2記載の移載システム。
【請求項6】
前記搬送ローラの上方に設けられて、前記ストッパを支持するとともに、当該ストッパを昇降させる又は所定軸周りに回転させることにより前記規制位置及び前記非規制位置の間で移動させる支持部を有することを特徴とする請求項5記載の移載システム。
【請求項7】
前記支持部が、前記物品の搬送方向に沿って移動可能であることを特徴とする請求項6記載の移載システム。
【請求項8】
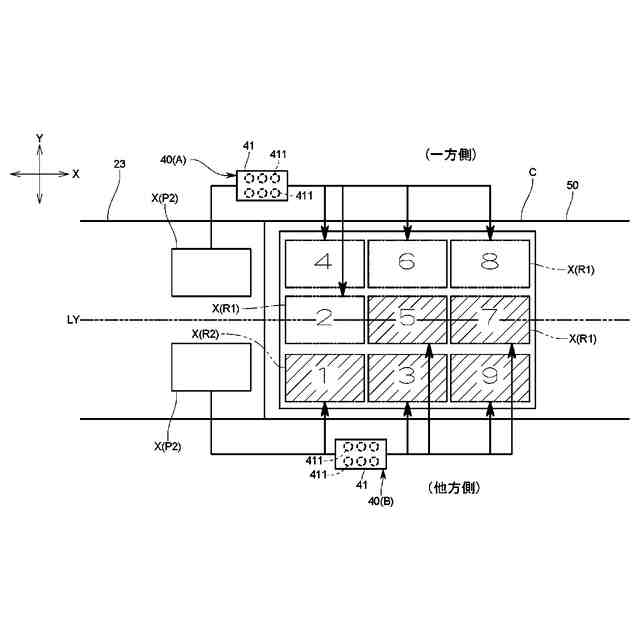
前記搬送機構が、複数の前記物品を順次受け取るとともに、それらの物品を複数列に分岐させながら送り出す分岐手段を有し、
前記分岐手段による分岐後の各列それぞれに、前記ストッパが互いに独立して移動可能に設けられている請求項2記載の移載システム。
【請求項9】
前記搬送機構が、前記ストッパにより移動が規制されている前記物品のうち、先頭の物品の前記ストッパによる規制が解除された際の移動速度が、後続の物品の前記ストッパによる規制が解除された際の移動速度よりも速くなるように構成されていることを特徴とする請求項2記載の移載システム。
【請求項10】
前記搬送機構が、前記物品を前記ピッキング位置の手前で減速させることを特徴とする請求項1記載の移載システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
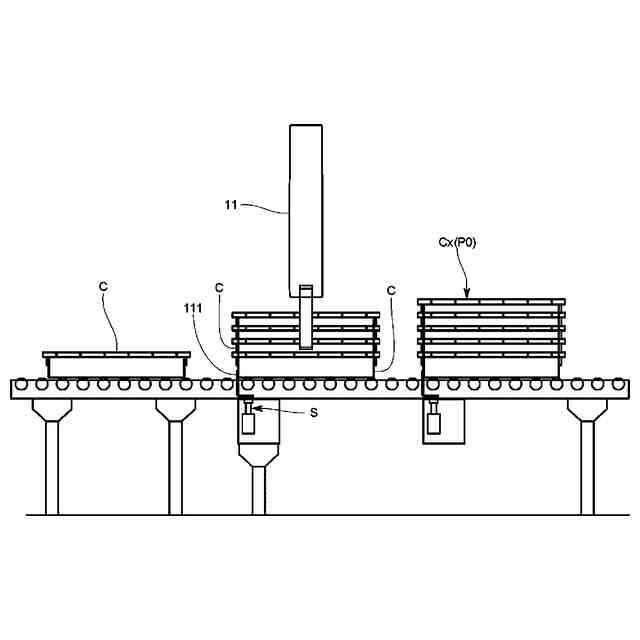
本発明は、例えばスライス肉などの食品の入った容器をラップ等で包装してなる物品を、コンテナなどのケースに移載する移載システム及び移載方法に関するものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
この種の移載システムとしては、特許文献1に示すように、搬送コンベアで搬送される物品を移載ロボットで順次ピックアップしてコンテナに移載するものがある。
【0003】
この移載ロボットは、パラレルリンクロボットと称される高速かつ精密な動作を可能とするものであり、搬送コンベア上を流れる物品を停止させることなくピックアップすることができ、複数個の物品を素早くコンテナに移載することができる。
【0004】
かかるシステムの低コスト化を図る態様として、パラレルリンクロボットに替えてより安価な移載ロボットを用いることが考えられる。
【0005】
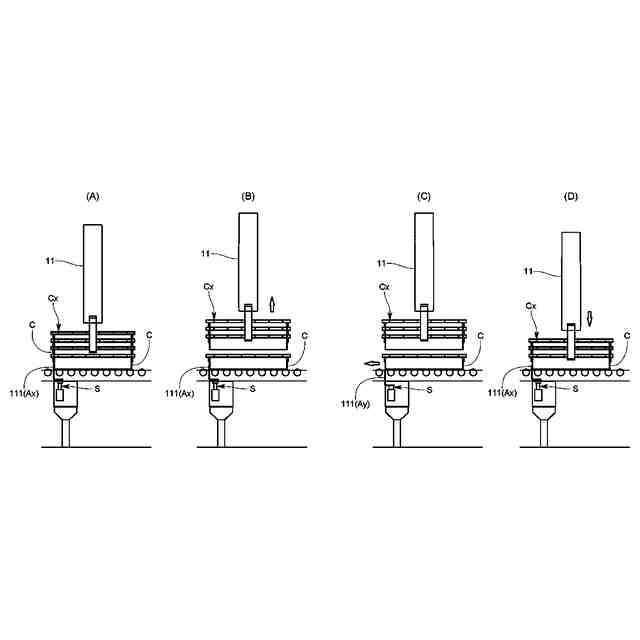
しかしながら、安価な移載ロボットを用いると、物品をピックアップする際に停止させる必要が生じ、その結果、ピックアップしようとする物品に後続の物品が閊えて(密着して)しまい、それらの物品同士がラップ等の包装材を介してくっついてしまう恐れがある。
【0006】
そうすると、先頭の物品をピックアップする際に、その物品や2番目の物品の姿勢が崩れたり位置ずれを起こしたりして、コンテナの狙った位置に移載することができないという問題が生じ得る。
【先行技術文献】
【特許文献】
【0007】
特開2022-133788号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
そこで本発明は、物品を移載する移載システムの製造コストの低減を図りつつも、物品を安定してピックアップできるようにすることを課題とするものである。
【課題を解決するための手段】
【0009】
すなわち本発明に係る移載システムは、食品を包装してなる物品を、所定のピッキング位置に搬送する搬送機構と、前記物品を前記ピッキング位置で停止させる停止手段と、前記ピッキング位置で停止している前記物品をピックアップして、所定の移載位置に搬送されたケースに移載する移載ロボットと、前記搬送機構によって前記ピッキング位置に順次搬送される複数の前記物品のうち、先行する物品を、後続の物品から離す分離手段とを具備することを特徴とするものである。
【0010】
このように構成された移載システムによれば、ピッキング位置で停止している物品をピックアップするので、移載ロボットとしては安価なものを用いることができ、システムの低コスト化を図れる。
そのうえ、順次搬送される複数の物品のうちの先行する物品を、後続の物品から引き離す分離手段を具備しているので、ピックアップしようとする物品がラップなどの包装部材を介して後続の物品にくっついてしまうことを防ぐことができ、ピッキング位置で停止している物品を安定してピックアップすることができる。
その結果、移載システムの製造コストの低減を図りつつも、物品を安定してピックアップすることが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
箱
12か月前
個人
ゴミ箱
11か月前
個人
収容箱
2か月前
個人
コンベア
4か月前
個人
ゴミ収集器
6か月前
個人
段ボール箱
6か月前
個人
段ボール箱
6か月前
個人
容器
8か月前
個人
楽ちんハンド
4か月前
個人
パウチ補助具
11か月前
個人
宅配システム
6か月前
個人
バンド
1か月前
個人
角筒状構造体
4か月前
個人
土嚢運搬器具
7か月前
個人
お薬の締結装置
5か月前
個人
閉塞装置
9か月前
個人
コード類収納具
7か月前
個人
包装容器
17日前
個人
廃棄物収容容器
1か月前
株式会社和気
包装用箱
8か月前
個人
ゴミ処理機
8か月前
個人
把手付米袋
3か月前
株式会社コロナ
梱包材
4か月前
個人
蓋閉止構造
3か月前
個人
貯蔵サイロ
6か月前
個人
蓋閉止構造
3か月前
個人
積み重ね用補助具
2か月前
株式会社新弘
容器
11か月前
株式会社イシダ
包装装置
12か月前
個人
搬送システム
6か月前
三甲株式会社
容器
1か月前
株式会社KY7
封止装置
2か月前
三甲株式会社
容器
5か月前
個人
包装箱
9か月前
株式会社新弘
容器
11か月前
株式会社新弘
容器
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ