TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025145699
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024046019
出願日
2024-03-22
発明の名称
制御回路、モータ駆動装置、モータシステム、及び制御方法
出願人
ローム株式会社
代理人
弁理士法人 佐野特許事務所
主分類
H02P
27/08 20060101AFI20250926BHJP(電力の発電,変換,配電)
要約
【課題】モータの相電流波形の歪みによるモータの損失増加を抑制する。
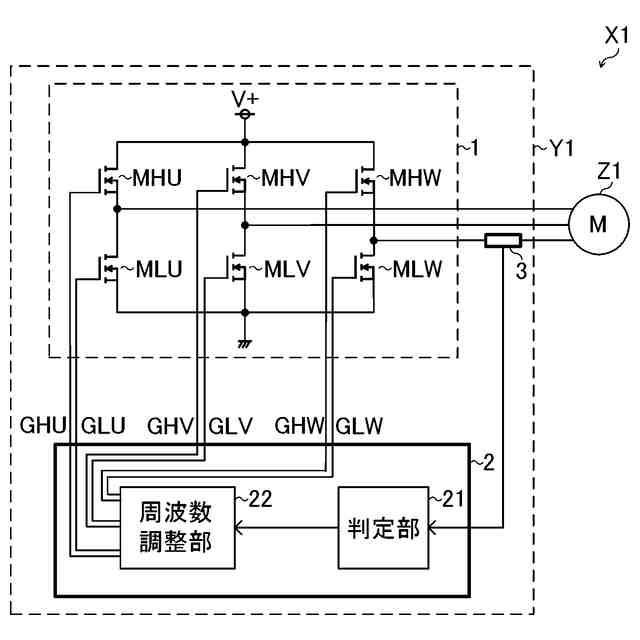
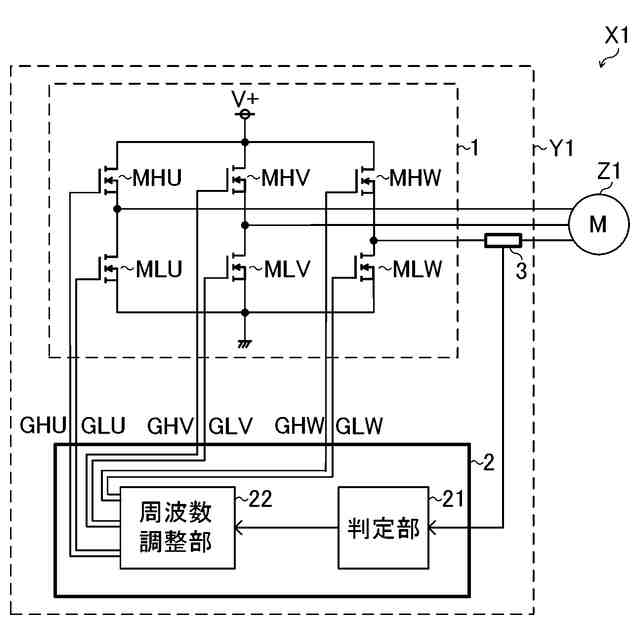
【解決手段】制御回路(2)は、モータ(Z1)を駆動するように構成されたインバータ(1)を制御するように構成されている。前記制御回路は、前記モータの相電流波形の歪みが第1所定レベル以上であるか否かを判定するように構成された判定部(21)と、前記判定部によって前記相電流波形の歪みが前記第1所定レベル以上であると判定された場合に、前記インバータのスイッチング周波数を下げるように構成された周波数調整部(22)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
モータを駆動するように構成されたインバータを制御するように構成された制御回路であって、
前記モータの相電流波形の歪みが第1所定レベル以上であるか否かを判定するように構成された判定部と、
前記判定部によって前記相電流波形の歪みが前記第1所定レベル以上であると判定された場合に、前記インバータのスイッチング周波数を下げるように構成された周波数調整部と、
を備える、制御回路。
続きを表示(約 1,100 文字)
【請求項2】
前記判定部によって前記相電流波形の歪みが前記第1所定レベル未満であると判定されるまで、前記周波数調整部は、前記スイッチング周波数を下げ続けるように構成されている、請求項1に記載の制御回路。
【請求項3】
前記判定部によって前記相電流波形の歪みが前記第1所定レベル未満である判定された場合に、前記周波数調整部は、前記スイッチング周波数を上げるように構成されている、請求項2に記載の制御回路。
【請求項4】
前記判定部は、前記相電流波形の歪みが前記第1所定レベルより低い第2所定レベル以上であるか否かも判定するように構成されており、
前記周波数調整部は、前記スイッチング周波数を下げ続けている状態において、前記判定部によって前記相電流波形の歪みが前記第2所定レベル以上であると判定された場合に、前記インバータのスイッチング周波数を更に下げるように構成されている、請求項2に記載の制御回路。
【請求項5】
前記判定部は、前記相電流波形を周波数スペクトラムに変換するように構成された変換部を含み、前記周波数スペクトラムに基づいて、前記相電流波形の歪みが前記第1所定レベル以上であるか否かを判定するように構成されている、請求項1に記載の制御回路。
【請求項6】
前記判定部は、前記周波数スペクトラムのうち前記モータの回転周波数の2倍以上の成分に基づいて、前記相電流波形の歪みが前記第1所定レベル以上であるか否かを判定するように構成されている、請求項5に記載の制御回路。
【請求項7】
前記判定部は、前記周波数スペクトラムのうち前記モータの回転周波数の2倍以上の成分の最大値に基づいて、前記相電流波形の歪みが前記第1所定レベル以上であるか否かを判定するように構成されている、請求項6に記載の制御回路。
【請求項8】
前記判定部は、前記相電流波形と、基準となる正弦波波形とを比較するように構成された波形比較部を含み、前記波形比較部の比較結果に基づいて、前記相電流波形の歪みが前記第1所定レベル以上であるか否かを判定するように構成されている、請求項1に記載の制御回路。
【請求項9】
請求項1~8のいずれか一項に記載の制御回路と、前記相電流波形を検出するように構成された検出器と、前記インバータと、を備える、モータ駆動装置。
【請求項10】
請求項9に記載のモータ駆動装置と、前記モータと、を備える、モータシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御回路、モータ駆動装置、モータシステム、及び制御方法に関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
一般にモータを回転させるとモータにリップル電流が発生する(例えば特許文献1参照)。モータを駆動するインバータのスイッチング周波数を高くすることで、リップル電流を減少させ、モータの損失を低下させることができる。
【先行技術文献】
【特許文献】
【0003】
特開平7-222483号公報
【0004】
[概要]
しかしながら、インバータのスイッチング周波数を高くし過ぎると、モータの相電流波形の歪みが大きくなり、モータの相電流波形の歪みの増大によってモータの損失が増加するおそれがある。
【0005】
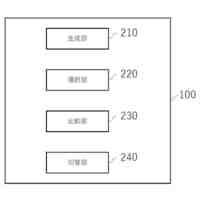
本開示に係る制御回路は、モータを駆動するように構成されたインバータを制御するように構成されている。前記制御回路は、前記モータの相電流波形の歪みが第1所定レベル以上であるか否かを判定するように構成された判定部と、前記判定部によって前記相電流波形の歪みが前記第1所定レベル以上であると判定された場合に、前記インバータのスイッチング周波数を下げるように構成された周波数調整部と、を備える。
【0006】
本開示に係るモータ駆動装置は、上記構成の制御回路と、前記インバータと、前記相電流波形を検出するように構成された検出器と、を備える。
【0007】
本開示に係るモータシステムは、上記構成のモータ駆動装置と、前記モータと、を備える。
【図面の簡単な説明】
【0008】
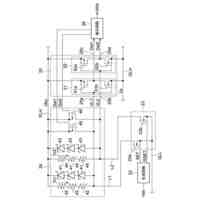
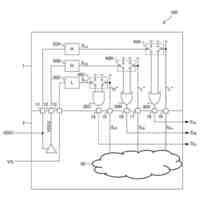
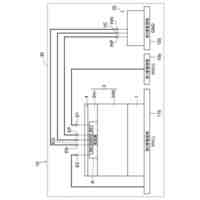
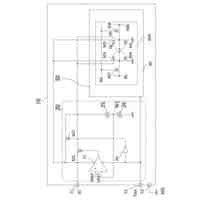
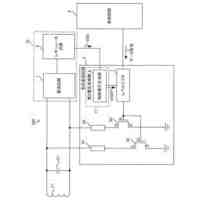
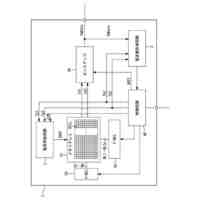
図1は、本開示の実施形態に係るモータシステムの構成を示す図である。
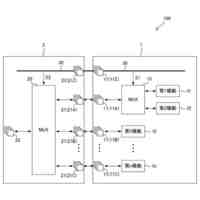
図2は、判定部の第1構成例を示す図である。
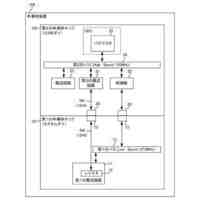
図3は、制御回路の第1動作例を示すフローチャートである。
図4は、制御回路の第2動作例を示すフローチャートである。
図5は、判定部の第2構成例を示す図である。
図6は、制御回路の第3動作例を示すフローチャートである。
【0009】
[詳細な説明]
図1は、本開示の実施形態に係るモータシステムの構成を示す図である。モータシステムX1は、モータ駆動装置Y1と、モータZ1と、を備える。
【0010】
モータ駆動装置Y1は、インバータ1と、制御回路2と、電流検出器3と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ローム株式会社
発振回路
10日前
ローム株式会社
駆動回路
1日前
ローム株式会社
半導体装置
6日前
ローム株式会社
半導体装置
今日
ローム株式会社
半導体装置
6日前
ローム株式会社
半導体装置
6日前
ローム株式会社
半導体装置
2日前
ローム株式会社
半導体装置
6日前
ローム株式会社
半導体装置
6日前
ローム株式会社
半導体装置
1日前
ローム株式会社
半導体装置
1日前
ローム株式会社
半導体装置
今日
ローム株式会社
半導体装置
8日前
ローム株式会社
半導体装置
1日前
ローム株式会社
メモリ装置
6日前
ローム株式会社
暗号化装置
今日
ローム株式会社
半導体装置
8日前
ローム株式会社
半導体装置
今日
ローム株式会社
半導体装置
今日
ローム株式会社
テスト回路
今日
ローム株式会社
半導体装置
8日前
ローム株式会社
半導体装置
8日前
ローム株式会社
無線通信装置
今日
ローム株式会社
無線通信回路
1日前
ローム株式会社
信号出力回路
6日前
ローム株式会社
時間測定回路
1日前
ローム株式会社
フォトダイオード
1日前
ローム株式会社
TVSダイオード
8日前
ローム株式会社
TVSダイオード
8日前
ローム株式会社
不揮発性メモリ装置
6日前
ローム株式会社
不揮発性メモリ装置
6日前
ローム株式会社
不揮発性メモリ装置
6日前
ローム株式会社
判定回路、半導体装置
6日前
ローム株式会社
不揮発性半導体記憶装置
6日前
ローム株式会社
半導体装置及び半導体チップ
今日
ローム株式会社
表示装置及びソースドライバ
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ