TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025152252
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024054065
出願日
2024-03-28
発明の名称
制御装置
出願人
株式会社アイシン
代理人
弁理士法人R&C
主分類
B60L
7/12 20060101AFI20251002BHJP(車両一般)
要約
【課題】回転電機を備えた車両において停車制御を行う際に、路面状態が変化した場合でも車両の逆進を発生しにくくしつつ、要求制動力の変化に迅速に対応可能とする。
【解決手段】回転電機を備えた車両用駆動装置を制御対象とする制御装置は、回転電機が車輪と連動して回転する状態で、車両が走行している状態から停車する場合に、負の値に設定される目標トルクを目標値とするフィードフォワード制御と、回転電機の回転速度を目標回転速度に近づけるように回転電機のトルクを制御するフィードバック制御とを併せて実行する。要求制動力が変化した場合、フィードフォワード制御における目標トルク及びフィードバック制御における目標回転速度を、要求制動力の変化に応じて変更する。
【選択図】図5
特許請求の範囲
【請求項1】
回転電機を備えた車両用駆動装置を制御対象とする制御装置であって、
前記回転電機が車輪と連動して回転する状態で、車両が走行している状態から停車する場合に、要求制動力に応じて負の値に設定される目標トルクを目標値とするフィードフォワード制御と、前記回転電機の回転速度を漸減する目標回転速度に近づけるように前記回転電機のトルクを制御するフィードバック制御と、を併せて実行する停車前制御を実行し、
前記停車前制御の実行中に前記要求制動力が変化した場合に、前記フィードフォワード制御における前記目標トルク及び前記フィードバック制御における前記目標回転速度を、前記要求制動力の変化に応じて変更する、制御装置。
続きを表示(約 730 文字)
【請求項2】
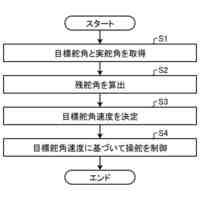
前記フィードバック制御における前記目標回転速度を、設定周期で、1周期前の前記目標回転速度と、前記回転電機の実回転加速度と、前記要求制動力又はそれに応じた物理量の変化比率と、に基づいて順次決定する、請求項1に記載の制御装置。
【請求項3】
前記要求制動力の変化前の前記回転電機の実回転加速度を不変とみなし、前記回転電機の実回転加速度及び前記要求制動力又はそれに応じた物理量のそれぞれの初期値を記憶しておき、
前記フィードバック制御における前記目標回転速度を、以下の式;
N(n)=N(n-1)+A0・(B(n)/B0)・ΔT
[ここで、
N(n)は、第n周期における目標回転速度であり、
A0は、前記回転電機の実回転加速度の初期値であり、
B0は、前記要求制動力又はそれに応じた物理量の初期値であり、
B(n)は、第n周期における前記要求制動力又はそれに応じた物理量であり、
ΔTは、1周期分の時間である。]
に従って算出する、請求項2に記載の制御装置。
【請求項4】
前記車両用駆動装置は、油圧ブレーキを備えた車両に搭載されるものであり、
前記停車前制御において、前記回転電機による回生制動トルクを次第に減少させるとともに、前記油圧ブレーキによる制動トルクを次第に増加させ、
前記フィードバック制御による調整後の前記回転電機のトルクを、前記フィードフォワード制御における前記目標トルクを基準とした、前記油圧ブレーキによる制動トルクに応じて定まる上限値と下限値との範囲内に制限する、請求項1から3のいずれか一項に記載の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
例えば電気自動車やハイブリッド自動車等、車輪の駆動力源として回転電機を備えた車両が利用されている。このような車両用駆動装置を制御する制御装置の一例が、特開2022-99702号公報(特許文献1)に開示されている。
【0003】
特許文献1の制御装置(制御装置10)は、車両(車両100)が走行している状態から停車する場合に、回転電機(回転電機141)に制駆動トルクを出力させて当該回転電機に回生させ、電費の向上を図っている。このとき、制御装置は、停車間際に、回転電機のトルクを所定の停車波形に沿って変化させることにより車両を停車させるように制御する。
【先行技術文献】
【特許文献】
【0004】
特開2022-99702号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1における停車制御は、回転電機のトルクをフィードフォワードで制御するものに過ぎない。このため、例えば路面の勾配や表面摩擦等が変化した場合に、車両が逆進する可能性があった。また、停車制御中にドライバーの要求制動力が変化した場合に、その変化に十分に対応できず、ドライバーに違和感を与えてしまう可能性があった。
【0006】
そこで、回転電機を備えた車両において停車制御を行う際に、路面状態が変化した場合でも車両の逆進を発生しにくくしつつ、要求制動力の変化に迅速に対応可能とすることが望まれる。
【課題を解決するための手段】
【0007】
本開示に係る制御装置は、
回転電機を備えた車両用駆動装置を制御対象とする制御装置であって、
前記回転電機が車輪と連動して回転する状態で、車両が走行している状態から停車する場合に、要求制動力に応じて負の値に設定される目標トルクを目標値とするフィードフォワード制御と、前記回転電機の回転速度を漸減する目標回転速度に近づけるように前記回転電機のトルクを制御するフィードバック制御と、を併せて実行する停車前制御を実行し、
前記停車前制御の実行中に前記要求制動力が変化した場合に、前記フィードフォワード制御における前記目標トルク及び前記フィードバック制御における前記目標回転速度を、前記要求制動力の変化に応じて変更する制御装置。
【0008】
この構成によれば、走行中の車両が停車する状況で、停車前制御を実行することで、フィードフォワード制御により回転電機のトルクを迅速に負の値の目標トルクに近づけて、車両を適切に減速させることができる。また、併せて実行されるフィードバック制御により、当該フィードバック制御における目標回転速度に応じて、回転電機の回転速度をゼロに向かって減少させることができる。仮に路面状態(例えば勾配や表面摩擦等)が変化して回転速度が目標回転速度からずれたとしても、その偏差を減少させて回転電機の回転速度を目標回転速度に近づけるように回転電機のトルクが制御されるので、車両の逆進が発生しにくい。このような停車前制御の実行中に要求制動力が変化した場合には、フィードフォワード制御における目標トルクとフィードバック制御における目標回転速度との両方が、要求制動力の変化に応じて変更されるので、要求制動力の変化に迅速に対応できる。これらのことから、回転電機を備えた車両において停車制御を行っている状況で、路面状態が変化した場合でも車両の逆進を発生しにくくしつつ、要求制動力の変化に迅速に対応可能とすることができる。
【0009】
本開示に係る技術のさらなる特徴と利点は、図面を参照して記述する以下の例示的かつ非限定的な実施形態の説明によってより明確になるであろう。
【図面の簡単な説明】
【0010】
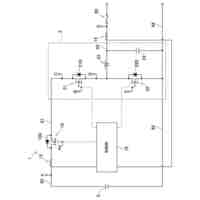
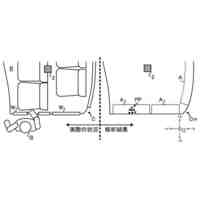
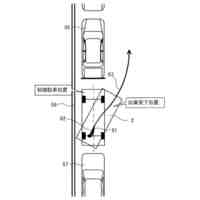
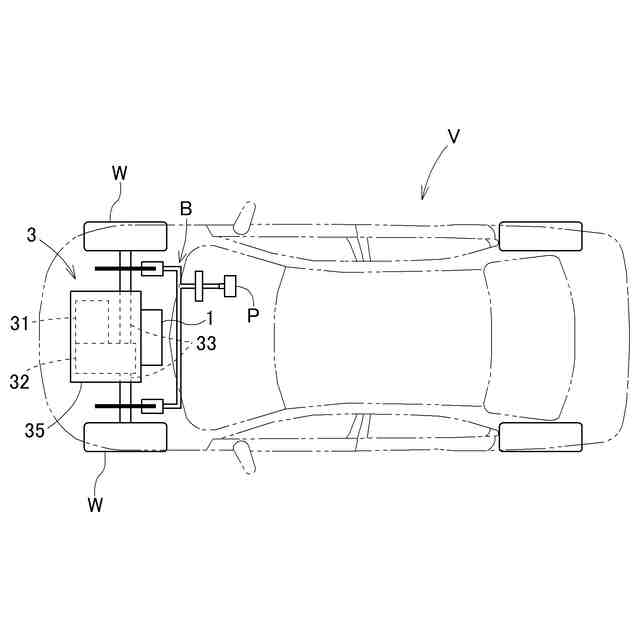
実施形態の車両用駆動装置及び制御装置が搭載された車両の模式図
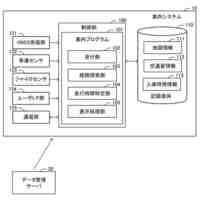
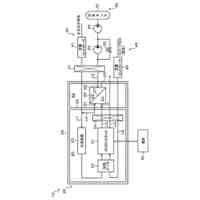
制御装置のブロック図
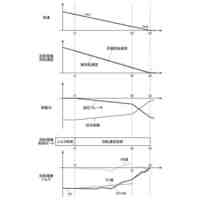
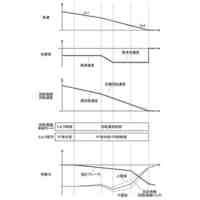
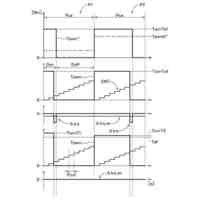
停車制御時(通常時)の各部のタイムチャート
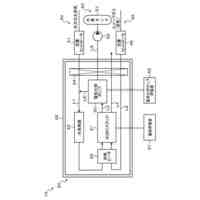
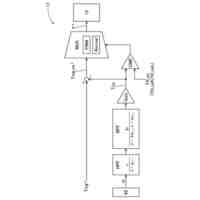
回転電機のトルク指令を決定するための制御ブロック図
停車制御時(要求制動力変化時)の各部のタイムチャート
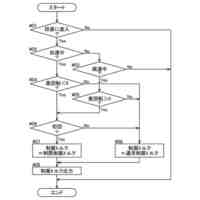
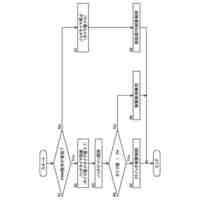
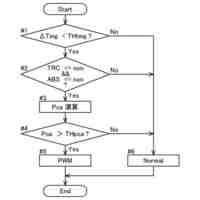
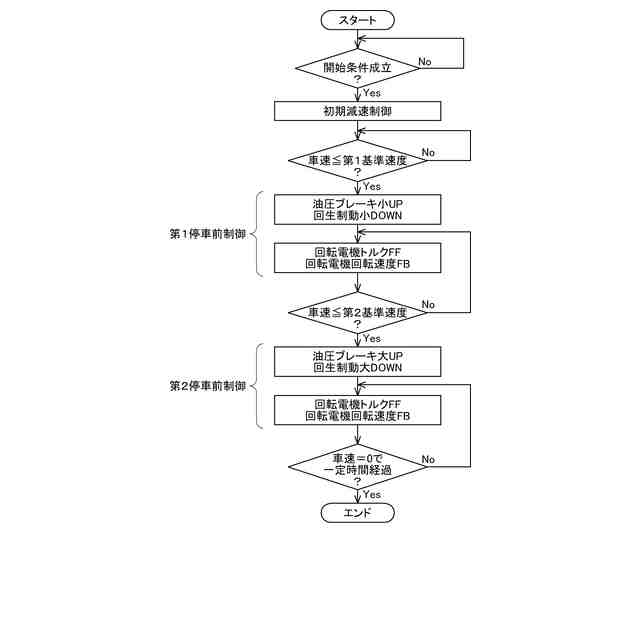
停車制御の処理手順を示すフローチャート
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
ロータ
2日前
株式会社アイシン
保護装置
1日前
株式会社アイシン
制御装置
1日前
株式会社アイシン
駆動装置
1日前
株式会社アイシン
検知装置
1日前
株式会社アイシン
回転電機
3日前
株式会社アイシン
制御装置
1日前
株式会社アイシン
制御装置
1日前
株式会社アイシン
電子機器
1日前
株式会社アイシン
レーダ装置
1日前
株式会社アイシン
衝撃吸収部材
1日前
株式会社アイシン
運転支援装置
1日前
株式会社アイシン
センサ固定具
2日前
株式会社アイシン
案内システム
1日前
株式会社アイシン
運転支援装置
1日前
株式会社アイシン
車両制御装置
1日前
株式会社アイシン
電解システム
2日前
株式会社アイシン
超音波センサ
2日前
株式会社アイシン
電解システム
1日前
株式会社アイシン
乗員検知装置
1日前
株式会社アイシン
超音波センサ
2日前
株式会社アイシン
出庫支援装置
1日前
株式会社アイシン
車両用制御装置
1日前
株式会社アイシン
車両用制御装置
1日前
株式会社アイシン
車両用駆動装置
1日前
株式会社アイシン
車両用制御装置
1日前
株式会社アイシン
車両用安全装置
1日前
株式会社アイシン
車両用制御装置
2日前
株式会社アイシン
車両用制御装置
2日前
株式会社アイシン
燃料電池システム
1日前
株式会社アイシン
巻線界磁式モータ
3日前
株式会社アイシン
巻線界磁式モータ
3日前
株式会社アイシン
巻線界磁式モータ
3日前
株式会社アイシン
チップ放熱システム
2日前
株式会社アイシン
弁開閉時期制御装置
3日前
株式会社アイシン
車両の制御システム
1日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ