TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025152253
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024054066
出願日
2024-03-28
発明の名称
制御装置
出願人
株式会社アイシン
代理人
弁理士法人R&C
主分類
B60L
15/20 20060101AFI20251002BHJP(車両一般)
要約
【課題】車両が路面上の段差を通過する場合にも、弊害少なく制振制御を実行できるようにする。
【解決手段】回転電機を備えた車両用駆動装置を制御対象とする制御装置は、段差進入判定部と、加減速状態判定部と、制振トルク算出部と、制振制御部とを備える。制振制御部は、車輪が段差に進入した場合であって予め定められた制限条件を満たす場合には、制振トルク算出部により算出された通常制振トルクよりも小さい制限後制振トルクを回転電機に出力させる。
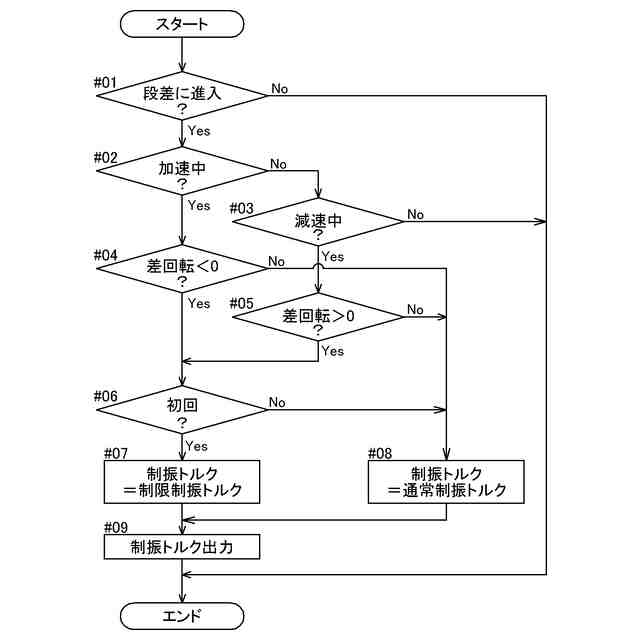
【選択図】図6
特許請求の範囲
【請求項1】
回転電機と、前記回転電機の駆動力を車輪に伝達する動力伝達系と、を備えた車両用駆動装置を制御対象とする制御装置であって、
路面上の段差への前記車輪の進入を判定する段差進入判定部と、
車両の加減速の状態を判定する加減速状態判定部と、
前記動力伝達系に生じる捻れを低減するための前記回転電機のトルクである制振トルクを算出する制振トルク算出部と、
前記回転電機に出力させる前記制振トルクの制御を行う制振制御部と、を備え、
前記制振トルク算出部により算出された前記制振トルクを通常制振トルクとして、
前記制振制御部は、前記段差進入判定部により前記車輪が前記段差に進入したと判定した場合であって、前記車両の加減速の状態と、前記車輪の回転速度と前記回転電機の回転速度との前記動力伝達系における同じ位置に換算した状態での速度差と、が予め定められた制限条件を満たす場合には、前記通常制振トルクよりも小さい制限後制振トルクを前記制振トルクとして前記回転電機に出力させる、制御装置。
続きを表示(約 310 文字)
【請求項2】
前記制振制御部は、前記制限後制振トルクをゼロに設定する、請求項1に記載の制御装置。
【請求項3】
前記制限条件は、前記段差への進入時に前記車両が加速状態にあり、かつ、前記車輪の換算回転速度が前記回転電機の換算回転速度よりも高いこと、又は、前記段差への進入時に前記車両が減速状態にあり、かつ、前記車輪の換算回転速度が前記回転電機の換算回転速度よりも低いことである、請求項1又は2に記載の制御装置。
【請求項4】
前記制振制御部は、前記制限条件を満たさない場合には、前記通常制振トルクを前記制振トルクとして前記回転電機から出力させる、請求項1又は2に記載の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
例えば電気自動車やハイブリッド自動車等、車輪の駆動力源として回転電機を備えた車両が利用されている。このような車両用駆動装置を制御する制御装置の一例が、特開2023-46935号公報(特許文献1)に開示されている。
【0003】
特許文献1の制御装置(制御装置20)は、車輪(車輪2f)の回転速度に含まれる場合がある振動成分によるABS制御への悪影響を回避するため、当該振動成分を回転電機(モータジェネレータ16)のトルクによって相殺又は抑制する制振制御を実行可能に構成されている。この制振制御によって出力される回転電機のトルク(制振トルク)は、相殺又は抑制すべき振動成分に対して逆位相となるように決定される。
【先行技術文献】
【特許文献】
【0004】
特開2023-46935号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1のような制振制御があらゆる場面において有効とは限らない。例えば路面上の段差を車両が通過する場合に、当該段差部分で車輪が路面から浮く場合がある。そのような車輪の浮きが生じた場合には、その後の再接地の際に、制振制御によって動力伝達系の捻じれが大きくなり、却って車両の振動を助長してしまう可能性があった。
【0006】
そこで、車両が路面上の段差を通過する場合にも、弊害少なく制振制御を実行できるようにすることが望まれる。
【課題を解決するための手段】
【0007】
本開示に係る制御装置は、
回転電機と、前記回転電機の駆動力を車輪に伝達する動力伝達系と、を備えた車両用駆動装置を制御対象とする制御装置であって、
路面上の段差への前記車輪の進入を判定する段差進入判定部と、
車両の加減速の状態を判定する加減速状態判定部と、
前記動力伝達系に生じる捻れを低減するための前記回転電機のトルクである制振トルクを算出する制振トルク算出部と、
前記回転電機に出力させる前記制振トルクの制御を行う制振制御部と、を備え、
前記制振トルク算出部により算出された前記制振トルクを通常制振トルクとして、
前記制振制御部は、前記段差進入判定部により前記車輪が前記段差に進入したと判定した場合であって、前記車両の加減速の状態と、前記車輪の回転速度と前記回転電機の回転速度との前記動力伝達系における同じ位置に換算した状態での速度差と、が予め定められた制限条件を満たす場合には、前記通常制振トルクよりも小さい制限後制振トルクを前記制振トルクとして前記回転電機に出力させる。
【0008】
この構成によれば、車両が路面上の段差を通過する際に車輪の浮きが生じる可能性が高い状況を、車両の加減速の状態と、車輪と回転電機との回転速度差(換算値)とに基づいて判定することができる。そして、そのような状況を判定した場合に、制振トルク算出部により算出された通常制振トルクよりも小さい制限後制振トルクを制振トルクとして回転電機に出力させることで、動力伝達系に生じる捻れを小さく抑えることができる。すなわち、車両が路面上の段差を通過する場合にも、弊害少なく制振制御を実行することができる。
【0009】
本開示に係る技術のさらなる特徴と利点は、図面を参照して記述する以下の例示的かつ非限定的な実施形態の説明によってより明確になるであろう。
【図面の簡単な説明】
【0010】
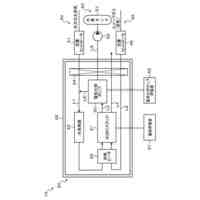
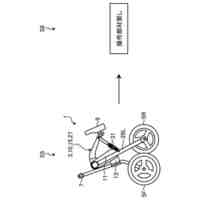
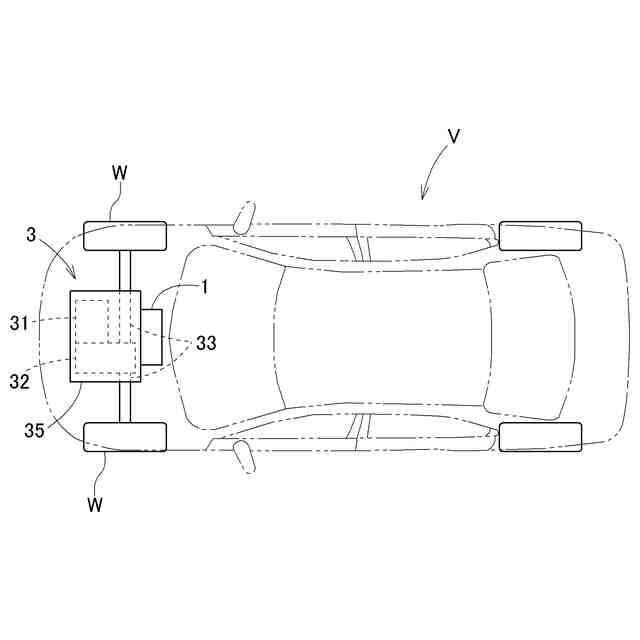
実施形態の車両用駆動装置及び制御装置が搭載された車両の模式図
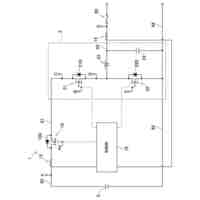
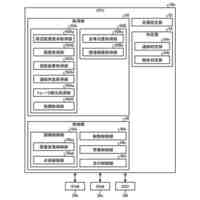
制御装置のブロック図
制振トルク(通常制振トルク)の決定方法の概念図
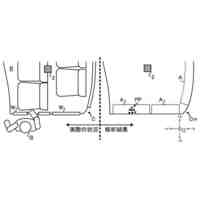
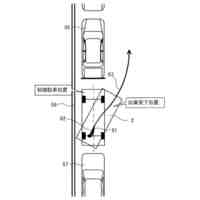
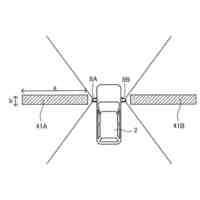
段差を通過する際の車両の挙動を示す模式図
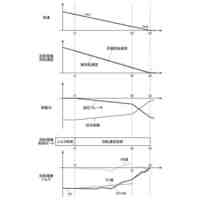
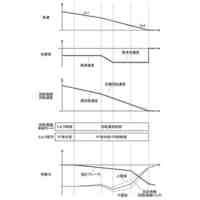
減速中の制振制御時の各部のタイムチャート
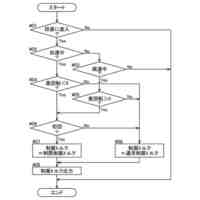
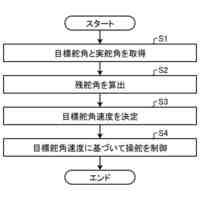
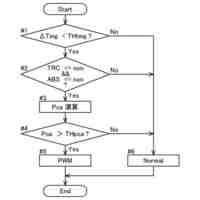
制振制御の処理手順を示すフローチャート
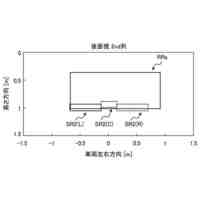
制振制御による振動低減効果の実証実験の結果
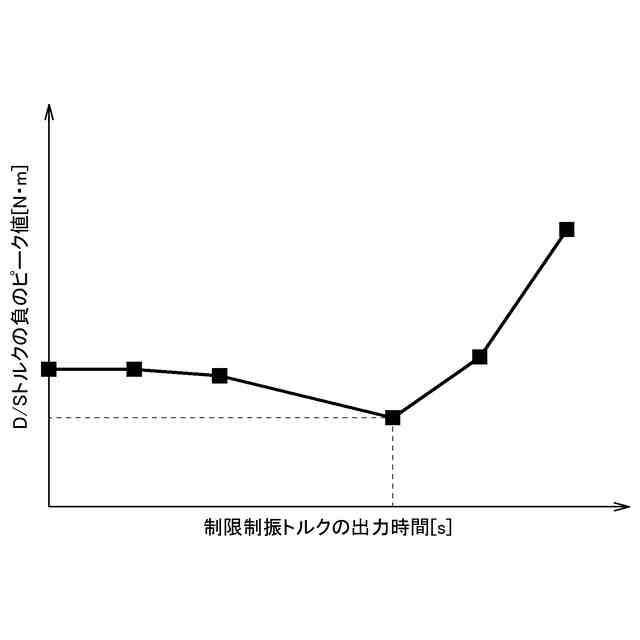
制限制振トルクの出力時間とドライブシャフトトルクのピーク値との関係を示すグラフ
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社アイシン
ロータ
3日前
株式会社アイシン
ステータ
3日前
株式会社アイシン
検知装置
4日前
株式会社アイシン
駆動装置
4日前
株式会社アイシン
制御装置
4日前
株式会社アイシン
制御装置
4日前
株式会社アイシン
制御装置
4日前
株式会社アイシン
電子機器
4日前
株式会社アイシン
ステータ
3日前
株式会社アイシン
ステータ
3日前
株式会社アイシン
ステータ
3日前
株式会社アイシン
保護装置
4日前
株式会社アイシン
レーダ装置
4日前
株式会社アイシン
折り畳み装置
3日前
株式会社アイシン
乗員検知装置
4日前
株式会社アイシン
走行制御装置
3日前
株式会社アイシン
電解システム
4日前
株式会社アイシン
運転支援装置
4日前
株式会社アイシン
出庫支援装置
4日前
株式会社アイシン
ガス検出装置
3日前
株式会社アイシン
折り畳み装置
3日前
株式会社アイシン
案内システム
4日前
株式会社アイシン
運転支援装置
4日前
株式会社アイシン
折り畳み装置
3日前
株式会社アイシン
牽引支援装置
3日前
株式会社アイシン
車両制御装置
4日前
株式会社アイシン
車両制御装置
3日前
株式会社アイシン
ドア支持装置
3日前
株式会社アイシン
牽引支援装置
3日前
株式会社アイシン
折り畳み装置
3日前
株式会社アイシン
運転支援装置
3日前
株式会社アイシン
衝撃吸収部材
4日前
株式会社アイシン
運転支援装置
3日前
株式会社アイシン
運転支援装置
3日前
株式会社アイシン
環境認識装置
3日前
株式会社アイシン
車両用制御装置
4日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ