TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025153572
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024056111
出願日
2024-03-29
発明の名称
無人空中移動体
出願人
個人
代理人
個人
主分類
B64U
10/20 20230101AFI20251002BHJP(航空機;飛行;宇宙工学)
要約
【課題】省スペースな空中移動体を提供する。
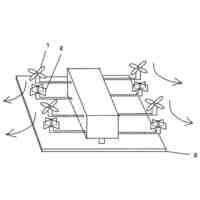
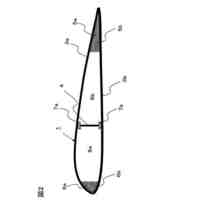
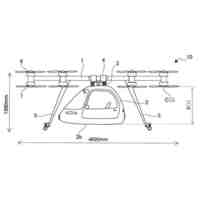
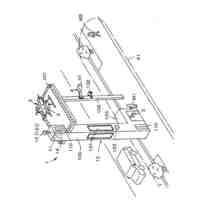
【解決手段】空中移動体1は、揚力を生じさせる複数の揚力エンジン21と、推進力を発生させる複数の推進エンジン22と、用途に応じた機器を備えるコンポーネント31を着脱可能に搭載する受け部122と、指定された姿勢になるように揚力エンジン21及び推進エンジン22の出力を制御する制御部41を含む運動制御装置40と、を備え、揚力エンジン21が発生させる揚力以上の揚力を発生させる主翼を備えない。
【選択図】図1
特許請求の範囲
【請求項1】
揚力を発生させ、逆噴射用のフラップを備えるジョットエンジン又はロケットエンジンである複数の揚力エンジンと、
推進力を発生させ、逆噴射用のフラップを備えるジェットエンジン又はロケットエンジンである複数の推進エンジンと、
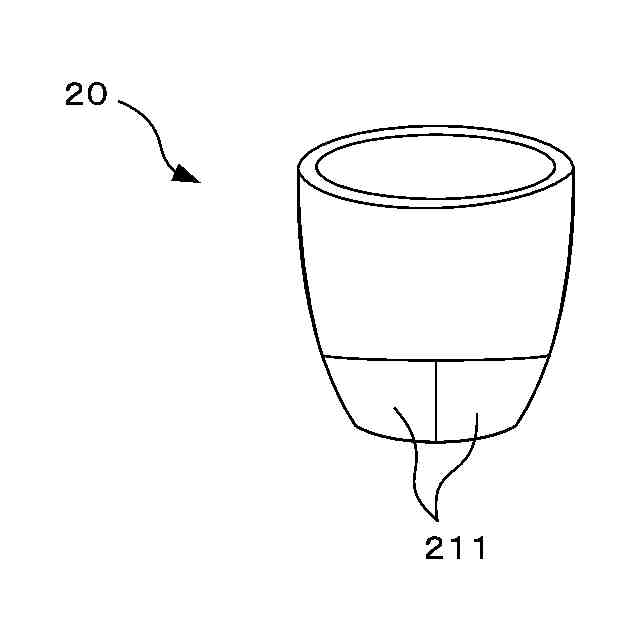
用途に応じた機器を備えるコンポーネントを着脱可能に搭載する受け部と、
姿勢変化ごとに指示された前記姿勢変化を実現するための前記揚力エンジンの出力を前記揚力エンジンごとに、前記推進エンジンの出力を前記推進エンジンごとに、それぞれ格納する姿勢テーブルと、
動作内容ごとに前記姿勢変化を停止させる動作停止条件を格納する動作条件テーブルと、
前記動作停止条件に規定される各条件に係るパラメータを検知するセンサ群と、
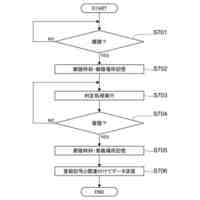
動作を行う旨の指示を受信したと判定した場合、前記動作条件テーブルを検索して指示された前記動作の動作内容に対応する姿勢及び前記動作停止条件を読み出し、前記姿勢テーブルを検索して先に読み出した前記姿勢に対応する前記揚力エンジン及び前記推進エンジンの出力を前記姿勢テーブルから読み出して前記揚力エンジン及び前記推進エンジンを読み出した出力に応じて出力させ、前記センサ群の出力にもとづいて前記動作停止条件が満たされたと判定した場合、指定された前記動作を停止する制御部と、
を備え、
前記揚力エンジンが発生させる前記揚力以上の前記揚力を発生させる主翼を備えない空中移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、空中移動体に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
航空機はその用途に応じて機能、装備、形状などが異なる。近時では、輸送用としてV-22(通称オスプレイ。例えば、非特許文献1を参照。)などの垂直離着陸航空機が上梓され、主に軍用に供されている。また、F-35B(例えば、非特許文献2を参照。)などの戦闘機として使用可能な垂直着陸機も上梓されている。
【0003】
しかし、V-22はプロペラの向きを変更する際に不安定になりがちであり、F-35Bは垂直離陸ができない。
【0004】
さらに、いずれも主翼などの部材が大きく、格納するためには大きなスペースが必要である。
【先行技術文献】
【特許文献】
【0005】
「MV-22オスプレイ」https://www.mod.go.jp/j/approach/anpo/osprey/haibi/pdf/mv22_pamphlet.pdf
「令和2年度防衛白書 <解説>F-35B戦闘機の取得」https://www.mod.go.jp/j/publication/wp/wp2020/html/nc007000.html
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明が解決しようとする課題は、省スペースな空中移動体を提供することである。
【0007】
なお、上記の「背景技術」、および「発明が解決しようとする課題」に記載した内容は、本発明をするに至った契機(きっかけ)を示すものであり、本発明の技術的範囲を限定するものではなく、また、本発明の技術的範囲の限定解釈を許容するものでもない(平成17年(行ケ)第10042号、及び出願日における特許庁審査基準第II部第2章 第2節3.2.1参照。)。
【課題を解決するための手段】
【0008】
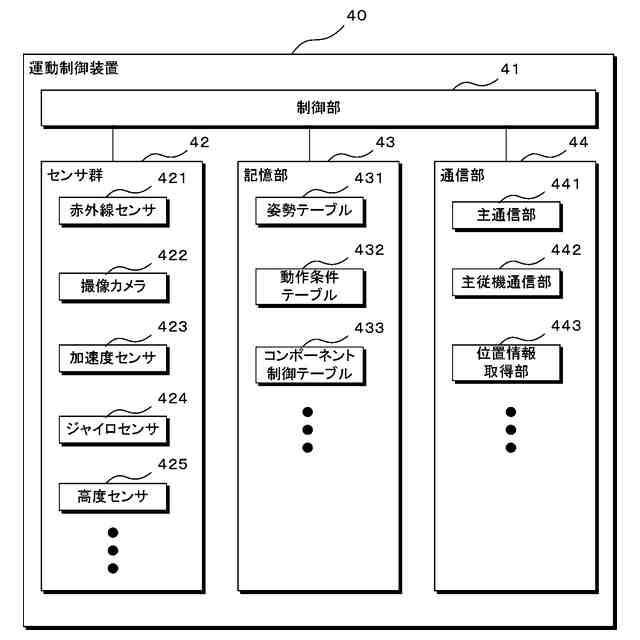
本発明は、揚力を発生させ、逆噴射用のフラップを備えるジョットエンジン又はロケットエンジンである複数の揚力エンジン21と、推進力を発生させ、逆噴射用のフラップを備えるジェットエンジン又はロケットエンジンである複数の推進エンジン22と、用途に応じた機器を備えるコンポーネントを着脱可能に搭載する受け部122と、姿勢変化ごとに指示された姿勢変化を実現するための揚力エンジン21の出力を揚力エンジン21ごとに、推進エンジン22の出力を推進エンジン22ごとに、それぞれ格納する姿勢テーブル431と、動作内容ごとに姿勢変化を停止させる動作停止条件を格納する動作条件テーブル432と、前記動作停止条件に規定される各条件に係るパラメータを検知するセンサ群42と、動作を行う旨の指示を受信したと判定した場合、前記動作条件テーブル432を検索して指示された前記動作の動作内容に対応する前記姿勢及び前記動作停止条件を読み出し、前記姿勢テーブル431を検索して先に読み出した前記姿勢に対応する前記揚力エンジン21及び前記推進エンジン22の出力を前記姿勢テーブル431から読み出して前記揚力エンジン21及び前記推進エンジン22を読み出した前記出力に応じて動作させ、前記センサ群の出力にもとづいて前記動作停止条件が満たされたと判定した場合、指定された前記動作を停止する制御部41と、を備え、前記揚力エンジン21が発生させる前記揚力以上の前記揚力を発生させる主翼を備えない空中移動体1を提供する。
【発明の効果】
【0009】
本発明によれば、省スペースな空中移動体を提供することができる。
【図面の簡単な説明】
【0010】
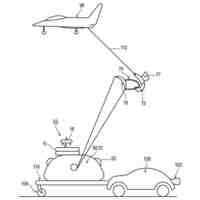
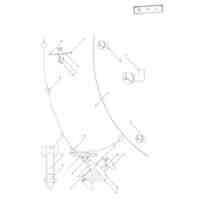
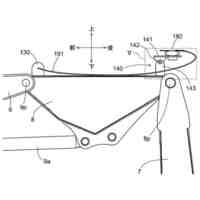
空中移動体の側面外観斜視図である。
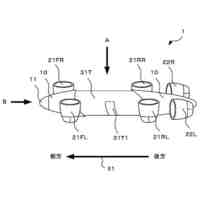
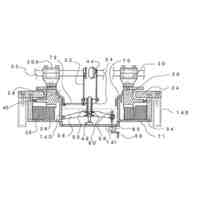
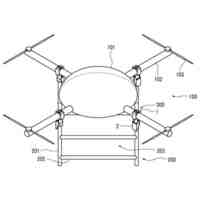
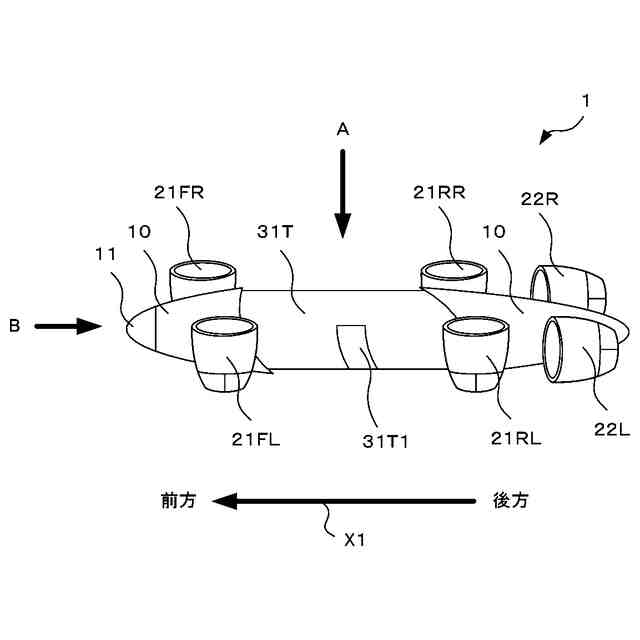
空中移動体の図1におけるA矢視図である。
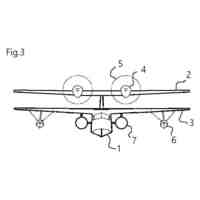
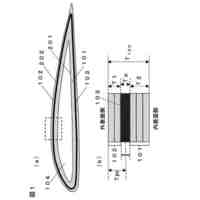
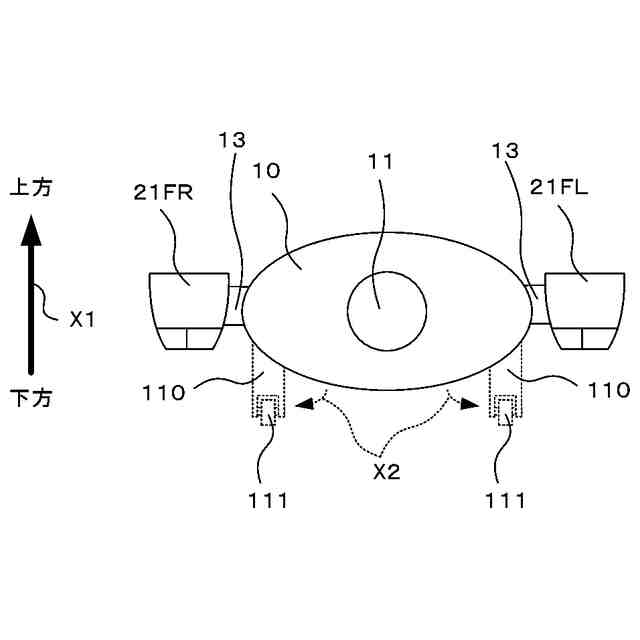
空中移動体の図1におけるB矢視図である。
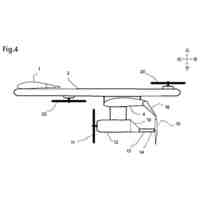
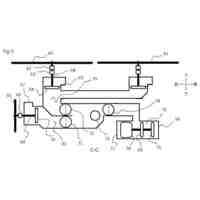
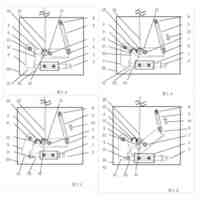
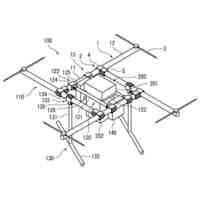
コンポーネントを取り外した空中移動体の平面図である。
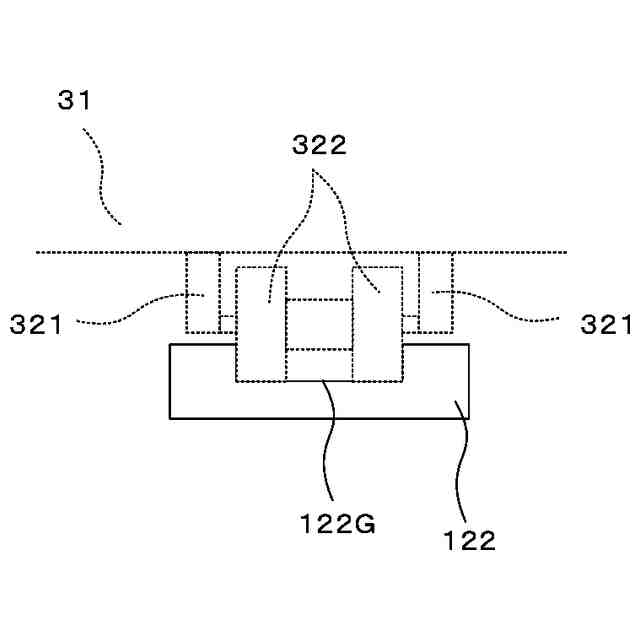
受け部の図4におけるC矢視端面図である。
戦闘コンポーネントを示す斜視図である。
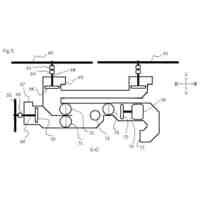
ジェットエンジンの例を示す図である。
逆噴射用のフラップを開いた状態のジェットエンジンの例を示す図である。
運動制御装置の構成を示すブロック図である。
姿勢テーブルのデータ構成の例を示す図である。
動作条件テーブルのデータ構成の例を示す図である。
コンポーネント制御テーブルのデータ構成の例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
ドローン
7か月前
個人
人工台風
2か月前
個人
着火ドローン
4か月前
個人
救難消防飛行艇
4か月前
個人
ドローンシステム
8か月前
東レ株式会社
中空回転翼
3か月前
個人
無人空中移動体
1日前
個人
動力原付きグライダー
17日前
個人
連続回転可能な飛行機翼
4か月前
個人
陸海空用の乗り物
5か月前
個人
導風板付き垂直離着陸機
2か月前
東レ株式会社
プロペラブレード
3か月前
東レ株式会社
プロペラブレード
3か月前
個人
空飛ぶクルマ
3か月前
個人
垂直離着陸機用エンジン改
8か月前
東レ株式会社
プロペラブレード
3か月前
個人
ドローン消音装置
11か月前
個人
空中移動システム
9か月前
個人
ドローンを自動離着陸する方法
8か月前
個人
エアライナー全自動パラシュート
7か月前
トヨタ自動車株式会社
ドローン
6か月前
株式会社ACSL
システム
7か月前
株式会社小糸製作所
飛行体ポート
4か月前
株式会社ACSL
システム
7か月前
個人
ヘリコプター駆動装置
4か月前
合同会社アドエア
飛行体の落下補助装置
9か月前
合同会社アドエア
パラシュート射出装置
7か月前
個人
搬送方法および搬送システム
4か月前
個人
飛行体
3か月前
個人
パラボラ型スペースデブリカタパルト
3か月前
全日本空輸株式会社
ドーリシステム
11か月前
個人
飛行体
3か月前
株式会社SUBARU
移動体
9か月前
個人
飛行体
3日前
個人
垂直離着陸機用ガスタービンエンジン
8か月前
日立建機株式会社
作業機械
3か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ