TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025155129
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2024058600
出願日
2024-04-01
発明の名称
制御装置,移動体,制御システム及び制御方法
出願人
株式会社日立製作所
代理人
弁理士法人開知
主分類
G05D
1/693 20240101AFI20251006BHJP(制御;調整)
要約
【課題】効率的に衝突を回避する制御を行うことができる制御装置等を提供する。
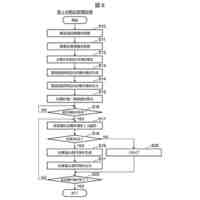
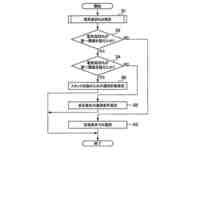
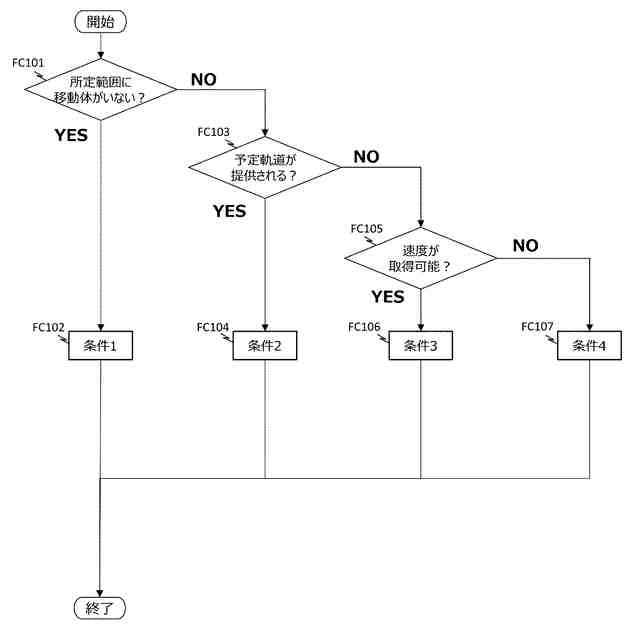
【解決手段】演算条件設定部は,移動体から所定範囲の外に他の移動体が存在すると,移動体の動作特性に基づいて第1拘束条件を移動体に設定する(FC102)。演算条件設定部は,移動体から所定範囲に他の移動体が存在しかつ他の移動体の予定軌道を受信すると(FC103:YES),移動体の位置と,予定軌道上の他の移動体の位置との間の距離が閾値より大きいという第2拘束条件を移動体に設定する(FC104)。演算条件設定部は,移動体から所定範囲に他の移動体が存在し,他の移動体の予定軌道を受信せず,かつ他の移動体が移動する速度を取得すると(FC105:YES),移動体の位置と,他の移動体が移動する速度に基づく他の移動体の位置との間の距離が閾値より大きいという第3拘束条件を移動体に設定する(FC106)。予測制御演算部は,設定された拘束条件を満たすように移動体を制御する。
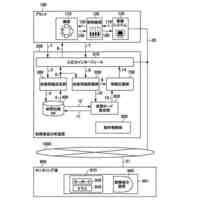
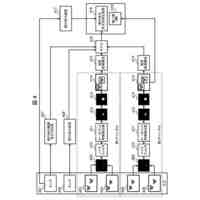
【選択図】図4
特許請求の範囲
【請求項1】
移動体から所定範囲の外に他の移動体が存在すると,前記移動体の動作特性に基づいて第1拘束条件を前記移動体に設定し,
前記移動体から前記所定範囲に前記他の移動体が存在し,かつ前記他の移動体の予定軌道を受信すると,前記移動体の位置と,予定軌道上の前記他の移動体の位置との間の距離が閾値より大きいという第2拘束条件を前記移動体に設定し,
前記移動体から前記所定範囲に前記他の移動体が存在し,前記他の移動体の予定軌道を受信せず,かつ前記他の移動体が移動する速度を取得すると,前記移動体の位置と,前記他の移動体が移動する速度に基づく前記他の移動体の位置との間の距離が前記閾値より大きいという第3拘束条件を前記移動体に設定する演算条件設定部と,
設定された拘束条件を満たすように前記移動体を制御する予測制御演算部と,
を備える制御装置。
続きを表示(約 1,600 文字)
【請求項2】
請求項1に記載の制御装置であって,
前記予測制御演算部は,前記拘束条件を満たすように前記移動体の制御入力を演算し,
前記制御装置は,前記制御入力に基づいて前記移動体の予定軌道を演算し,前記移動体と前記他の移動体の間の通信が確立すると,前記移動体の予定軌道を前記他の移動体へ提供する予定軌道提供部を備える
ことを特徴とする制御装置。
【請求項3】
請求項1に記載の制御装置であって,
前記演算条件設定部は,前記移動体から前記所定範囲に前記他の移動体が存在し,前記他の移動体の予定軌道を受信せず,かつ前記他の移動体が停止していると,前記移動体の位置と,前記他の移動体の位置との間の距離が前記閾値に所定マージンを加えた値より大きいという第4拘束条件を前記移動体に設定する
ことを特徴とする制御装置。
【請求項4】
請求項1に記載の制御装置であって,
前記予測制御演算部は,モデル予測制御により前記移動体の制御入力を演算し,
前記演算条件設定部は,前記拘束条件の番号が小さいほど,予測ホライズンを長くする
ことを特徴とする制御装置。
【請求項5】
請求項1に記載の制御装置であって,
前記演算条件設定部は,前記移動体と前記他の移動体がそれぞれ最大速度で所定時間内に移動可能な範囲が互いに素であると,前記第1拘束条件を前記移動体に設定する
ことを特徴とする制御装置。
【請求項6】
請求項1に記載の制御装置であって,
前記他の移動体が人であると,前記人に対応する運動方程式を用いて前記他の移動体の予測軌道を演算し,
前記他の移動体が機械であると,前記機械に対応する運動方程式を用いて前記他の移動体の予測軌道を演算する軌道予測部を備える
ことを特徴とする制御装置。
【請求項7】
請求項1に記載の制御装置であって,
前記他の移動体は複数であり,
前記演算条件設定部は,それぞれの前記他の移動体に対応する前記拘束条件を前記移動体に設定し,
前記予測制御演算部は,前記拘束条件のうち前記拘束条件の番号が最大のものに対応する予測ホライズンを用いて,モデル予測制御により前記移動体の制御入力を演算する
ことを特徴とする制御装置。
【請求項8】
請求項7に記載の制御装置であって,
前記演算条件設定部は,
前記第2拘束条件を設定すると,前記予測ホライズンまでの前記他の移動体の位置を前記他の移動体の予定軌道から取得し,
前記第3拘束条件を設定すると,前記予測ホライズンまでの前記他の移動体の位置を前記他の移動体が等速直線運動を行うとの予測に基づく予測軌道から取得する
ことを特徴とする制御装置。
【請求項9】
請求項1に記載の制御装置であって,
前記移動体で用いられる時刻と前記他の移動体で用いられる時刻の差に基づいて,前記他の移動体の予定軌道を補正する受信軌道補正部を備える
ことを特徴とする制御装置。
【請求項10】
請求項1に記載の制御装置を備えた移動体であって,
前記移動体の周辺の環境を認識する環境認識装置と,
前記移動体の状態を認識する状態認識装置と,
前記移動体の周辺の機器と通信を行う通信装置と,
前記環境認識装置によって認識された環境の情報から前記所定範囲に前記他の移動体が存在するかを判定し,前記通信装置を介して前記他の移動体の予定軌道を前記他の移動体から受信する演算条件判断部と,を備え,
前記予測制御演算部は,前記状態認識装置によって認識された前記移動体の状態に基づいて前記移動体を制御する
ことを特徴とする移動体。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は,制御装置,移動体,制御システム及び制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
物流倉庫の物品搬送や工場の工程間搬送の人手不足を解消するために,ロボット等の移動体(AGV:Automated Guided Vehicle,AMR:Autonomous Mobile Robotなど)の導入が進んでいる。このような移動体を導入するには,倉庫や工場内に移動体が移動可能な通路の設定(節点(ノード)と枝(ブランチ/エッジ)からなるグラフなどの作成)が必要になる。この設定が細かいほど,移動体が選択可能な通路の自由度は高くなるため,より効率的な搬送が可能になる。一方で,設定作業に多くの工数が必要になる。さらに,前記の通路の設定作業は,倉庫や工場のレイアウトが変更するたびに必要になるため,詳細な通路を設定する作業は,倉庫や工場を管理する事業者に大きな負担(エンジニアリングコスト)を求めることになる。
【0003】
また,倉庫や工場では,通路上に物品が仮置きされることもあるため,正確な地図情報を取得すること自体が困難である。なお,この課題は他の産業領域でも共通になり得る。例えば,公道を走行する自動運転車両を扱う場合,道路工事による一時的な道路規制に伴い,パイロンや看板が設置されるといった環境変化が生じるため,正確な地図情報の取得は難しい。また,施工現場や鉱山などで運用される自動化建設機械(油圧ショベル,ホイールローダ,ダンプトラックなど)を扱う場合は,掘削作業に伴い,地図情報が時々刻々と変化する。
【0004】
このような課題に対して,特許文献1(段落[0039])には,「移動制御装置10は,制約条件と,ビークルの位置と,目標位置の情報を取得したら,制限付き最適化問題を解き,ビークルM台分の制御入力を算出する(ステップS16)。移動制御装置10は,先読ステップ数NPHを用いて,制約条件を満たすビークルの移動を算出する。つまり,全ビークルの移動経路の各ステップにおいて,ビークルと目標位置の偏差を評価し,全ビークルの移動経路として,偏差が小さくなる移動経路を算出する。」と記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2021-77090号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1によれば,事前に倉庫や工場内に詳細な通路情報を設計せずに,移動体が目標位置にたどり着く経路を算出することができる。また,複数台の移動体のダイナミクスを考慮して,それぞれの移動体が接触しない移動計画を算出するため,各移動体の経路を個別に最適化する方法に比べて,移動効率に優れた経路が生成されることが期待できる。
【0007】
ただし,特許文献1は,複数台の移動体の移動計画を同時に解く必要があるため,移動体の台数が増えるにつれて計算時間が膨大になり,実時間で経路を算出できなくなる可能性がある。
【0008】
さらに,特許文献1は,移動体の目標位置は想定しているが,作業員の目標位置は想定されていない。つまり,倉庫や工場で物品の搬送,回収を行う人の移動先を考慮できていないため,移動体が人の作業性を損なう可能性もある。
【0009】
本発明は以上のような課題を解決するためになされたものであり,効率的に衝突を回避する制御を行うことができる制御装置等を提供することを目的としている。
【課題を解決するための手段】
【0010】
上記目的を達成するために,本発明の一例の制御装置は,移動体から所定範囲の外に他の移動体が存在すると,前記移動体の動作特性に基づいて第1拘束条件を前記移動体に設定し,前記移動体から前記所定範囲に前記他の移動体が存在し,かつ前記他の移動体の予定軌道を受信すると,前記移動体の位置と,予定軌道上の前記他の移動体の位置との間の距離が閾値より大きいという第2拘束条件を前記移動体に設定し,前記移動体から前記所定範囲に前記他の移動体が存在し,前記他の移動体の予定軌道を受信せず,かつ前記他の移動体が移動する速度を取得すると,前記移動体の位置と,前記他の移動体が移動する速度に基づく前記他の移動体の位置との間の距離が前記閾値より大きいという第3拘束条件を前記移動体に設定する演算条件設定部と,設定された拘束条件を満たすように前記移動体を制御する予測制御演算部と,を備える。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
調停案提示システム
今日
株式会社日立製作所
部品管理装置及び方法
6日前
株式会社日立製作所
ソフトウェア生成システム
9日前
株式会社日立製作所
情報処理装置、情報処理方法
8日前
株式会社日立製作所
情報処理装置及び情報処理方法
13日前
株式会社日立製作所
回転電機および電動機システム
13日前
株式会社日立製作所
治療効果予測システムおよび方法
今日
株式会社日立製作所
蒸発乾固装置および蒸発乾固方法
7日前
株式会社日立製作所
情報処理システム、及び情報処理方法
6日前
株式会社日立製作所
情報処理システム、及び情報処理方法
8日前
株式会社日立製作所
計算機システム及び障害対処支援方法
今日
株式会社日立製作所
設計図書のチェックシステムおよび方法
13日前
株式会社日立製作所
説明情報生成装置及び説明情報生成方法
7日前
株式会社日立製作所
半導体装置および半導体装置の駆動方法
9日前
株式会社日立製作所
故障要因分析装置及び故障要因分析方法
7日前
株式会社日立製作所
仮想空間生成装置および仮想空間生成方法
13日前
株式会社日立製作所
臨床試験計画装置および臨床試験計画方法
8日前
株式会社日立製作所
燃料電池ブロックおよび燃料電池システム
今日
株式会社日立製作所
制御装置,移動体,制御システム及び制御方法
2日前
株式会社日立製作所
制御設計支援方法、および、制御設計支援装置
9日前
株式会社日立製作所
ノイズ低減方法、装置、電子機器及び可読媒体
14日前
株式会社日立製作所
エレベーター、操作盤、エレベーターの制御方法
13日前
株式会社日立製作所
システム障害監視装置及びシステム障害監視方法
14日前
株式会社日立製作所
生産ラインを編成する装置、システムおよび方法
1日前
株式会社日立製作所
異常事象対処支援装置および異常事象対処支援方法
1日前
株式会社日立製作所
エンティティ抽出システム、エンティティ選択方法
1日前
株式会社日立製作所
クラウドデータベースシステム及びデータ管理方法
8日前
株式会社日立製作所
解析回避機能検出システム及び解析回避機能検出方法
14日前
株式会社日立製作所
行動処理装置、行動処理方法および行動処理プログラム
13日前
株式会社日立製作所
速度異常検出装置、乗客コンベア及び速度異常検出方法
8日前
株式会社日立製作所
運用管理装置、運用管理方法、及び運用管理プログラム
9日前
株式会社日立製作所
ストレージシステム及びストレージシステムの制御方法
7日前
株式会社日立製作所
水電解システムの運用装置及び水電解システムの運用方法
7日前
株式会社日立製作所
ロボット制御装置、ロボット、及び、ロボット制御システム
7日前
株式会社日立製作所
飛行体検知装置、飛行体検知方法、及び飛行体制御システム
6日前
株式会社日立製作所
情報処理方法、情報処理プログラム、及び情報処理システム
6日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ