TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025150207
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024050981
出願日
2024-03-27
発明の名称
ロボット制御装置、ロボット、及び、ロボット制御システム
出願人
株式会社日立製作所
代理人
ポレール弁理士法人
主分類
B25J
9/22 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】物体がバラ積み状態の場合でも、その物体を把持し、嵌合する動作を実現するロボットを提供する。
【解決手段】把持する物体に関する物体情報と、物体を把持作業位置から目標作業位置に移動させた際の教示環境における物体の位置変化に関する変化情報と、目標作業位置に関する作業環境情報と、を含む教示データを記憶する記憶部と、物体情報に基づいて、教示データ中の物体と同種の物体を把持する動作を生成する動作生成部と、作業ロボットが把持した物体と作業ロボットのハンドとの物体ハンド相対関係を算出する算出部と、を備え、算出部は、作業環境情報に基づき作業ロボットと目標作業位置とのロボット目標作業位置相対関係を算出し、動作生成部は、変化情報と、物体ハンド相対関係と、ロボット目標作業位置相対関係とに基づいて、作業ロボットが把持した物体の位置変化が、教示データに含まれる位置変化に沿うように作業ロボットの動作軌道を生成する。
【選択図】図3
特許請求の範囲
【請求項1】
教示データに基づいて作業ロボットの動作を制御するロボット制御装置であって、
把持する物体に関する物体情報と、教示者又は教示ロボットが前記物体を把持作業位置から目標作業位置に移動させた際の教示環境における該物体の位置変化に関する変化情報と、前記目標作業位置に関する作業環境情報と、を含む教示データを記憶する記憶部と、
前記記憶部が記憶する前記物体情報に基づいて、前記教示データ中の前記物体と同種の物体を把持する動作を生成する動作生成部と、
前記動作生成部が生成した前記動作により前記作業ロボットが把持した物体と前記作業ロボットのハンドとの物体ハンド相対関係を算出する算出部と、を備え、
前記算出部は、さらに、前記作業環境情報に基づき前記作業ロボットと前記目標作業位置とのロボット目標作業位置相対関係を算出し、
前記動作生成部は、前記変化情報と、前記物体ハンド相対関係と、前記ロボット目標作業位置相対関係とに基づいて、前記作業ロボットが把持した物体の位置変化が、前記教示データに含まれる前記位置変化に沿うように前記作業ロボットの動作軌道を生成することを特徴とするロボット制御装置。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載のロボット制御装置であって、
前記物体ハンド相対関係および前記ロボット目標作業位置相対関係は、相対的な位置関係であることを特徴とするロボット制御装置。
【請求項3】
請求項1に記載のロボット制御装置であって、
前記算出部は、カメラで撮影した画像情報に基づき前記教示者又は前記教示ロボットが前記物体を把持作業位置から目標作業位置に移動させた際の該物体の位置変化と作業環境位置を認識し、前記物体の位置変化と前記作業環境位置に基づいて、前記変化情報を算出することを特徴とするロボット制御装置。
【請求項4】
請求項1に記載のロボット制御装置であって、
前記算出部は、カメラで撮影した画像情報および前記物体情報に基づき前記物体を把持した瞬間の前記物体ハンド相対関係を算出し、
さらに画像情報と前記作業環境情報に基づき前記作業ロボットと作業環境の作業ロボット作業環境相対関係を算出し、
前記物体ハンド相対関係と、前記作業ロボット作業環境相対関係と、前記作業ロボットの動作軌道とに基づき、前記変化情報を算出することを特徴とするロボット制御装置。
【請求項5】
請求項3に記載のロボット制御装置であって、
動作生成部は、前記画像情報と前記記憶部が記憶する前記物体情報に基づいて把持する物体の候補を算出し、
前記画像情報と把持物体候補の物体情報から、前記把持物体候補の周囲の障害物を検出し、
前記把持物体候補とその周囲の障害物とに基づいて、把持点位置を決定し、
前記把持点位置に基づいて前記作業ロボットを制御することで、前記教示データ中の前記物体と同種の物体を把持することを特徴とするロボット制御装置。
【請求項6】
請求項1に記載のロボット制御装置であって、
動作生成部は、
把持する物体の候補とその周囲の障害物情報と嵌合動作に係る前記物体の位置変化に関する変化情報と目標作業位置の情報とに基づいて、嵌合動作の際に障害物と衝突しない把持点位置を決定し、教示データ中の前記物体と同種の物体を把持することを特徴とする。
【請求項7】
請求項1に記載のロボット制御装置であって、
前記記憶部は、さらに前記教示者又は前記教示ロボットが物体をピッキングする際の物体座標系におけるTCPのピッキング軌道及び前記教示ロボットが把持した物体に加えた力の変化情報を記憶し、
前記動作生成部は、把持する物体の候補の位置情報とその周囲の障害物情報と教示した複数のピッキングの軌道とから、把持する物体と周囲障害物に衝突することなく該物体をピッキングする軌道を選択すると共に、
前記把持する物体の位置と前記力の変化情報とから、前記作業ロボットが把持する物品に加える力指令を算出し、
前記ピッキングの軌道と力指令の情報に基づき物品を把持することを特徴とするロボット制御装置。
【請求項8】
請求項1に記載のロボット制御装置であって、
前記記憶部は、さらに教示環境における前記教示ロボットが前記物体に加える力の変化情報を含む教示データを記憶し、
前記動作生成部は、さらに、前記力の変化情報と、前記物体の位置変化に関する変化情報と、前記ロボット目標作業位置相対関係とに基づいて、教示データに含まれる前記教示ロボットが前記物体に加える力の方向と大きさが再現されるように作業ロボットの力を発生させることを特徴とするロボット制御装置。
【請求項9】
請求項3に記載のロボット制御装置であって、
前記算出部は、前記画像情報と前記作業環境情報に基づき前記カメラと前記目標作業位置とのロボット目標作業位置相対関係を算出し、該ロボット目標作業位置相対関係とカメラとロボットの相対関係とに基づいて、前記目標作業位置と前記ロボットの相対関係を算出することを特徴とするロボット制御装置。
【請求項10】
請求項1に記載のロボット制御装置であって、
教示者は物理的に接触して教示ロボットを操作し、動作を教示することを特徴とするロボット制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、教示データを用いて作業ロボットの動作を制御するロボット制御装置、それを備えたロボット、及び、ロボット制御システムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
ピック&プレース、嵌合、組立などの各種作業を実施する従来の作業ロボットには、定型作業にだけ対応するものが多かったが、近年の作業ロボットには、周囲の状況に柔軟に自律対応する適応性が求められている。このような背景から、自律ロボットの制御に関する様々な技術が公開されている。
【0003】
例えば、特許文献1の請求項1には、「被把持物を把持して移動させるロボットに作業を教示するロボット教示装置であって、教示作業中に教示者により把持される第1被把持物のポーズである教示用ポーズを計測及び/又は算出する教示用ポーズ計測部と、ロボットにより把持される第2被把持物のポーズが、前記教示用ポーズと同一となるよう、前記ロボットの関節変位のシーケンスを生成するロボット動作生成部と、を備えたロボット教示装置」との記載がある。
【先行技術文献】
【特許文献】
【0004】
国際公開第2021/260898号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、把持対象の物体がバラ積み状態で置かれている場合や、把持対象の物体が置かれている姿勢がランダムに変わるような場合は、ロボットのハンドが周囲環境とぶつからないように把持対象の物体を把持する必要がある。そのため、ロボットが、必ずしも教示用ポーズと同一のポーズで把持対象の物体を掴めるとは限らない。また、バラ積み状態等にある物体を把持した後、把持した物体を穴に嵌合する作業を考えると、教示した把持姿勢と実際の把持姿勢が異なる場合がある。そのため、特許文献1のように教示用ポーズ通りにロボットを制御しても、嵌合する穴と把持対象の物体の位置がずれてしまう。この問題を解決するには、把持姿勢ごとに特許文献1の技術を用いて嵌合動作を教示する手法もある。しかしながら、バラ積み状態からピッキングする姿勢は多様なため、教示回数が膨大になるという別の問題が発生する。このように、特許文献1の技術では、把持対象の物体がバラ積み状態で置かれている環境下では、教示した嵌合作業を再現できない可能性が高かった。
【0006】
そこで、本発明は、ロボットが物体を把持し、把持対象の物体に対する所望の動作を少ない教示回数で実現できるロボット制御装置、ロボット、及びロボット制御システムを提供することにある。
【課題を解決するための手段】
【0007】
教示データに基づいて作業ロボットの動作を制御するロボット制御装置であって、把持する物体に関する物体情報と、教示者又は教示ロボットが前記物体を把持作業位置から目標作業位置に移動させた際の教示環境における該物体の位置変化に関する変化情報と、前記目標作業位置に関する作業環境情報と、を含む教示データを記憶する記憶部と、前記記憶部が記憶する前記物体情報に基づいて、前記教示データ中の前記物体と同種の物体を把持する動作を生成する動作生成部と、前記動作生成部が生成した前記動作により前記作業ロボットが把持した物体と前記作業ロボットのハンドとの物体ハンド相対関係を算出する算出部と、を備え、前記算出部は、さらに、前記作業環境情報に基づき前記作業ロボットと前記目標作業位置とのロボット目標作業位置相対関係を算出し、前記動作生成部は、前記変化情報と、前記物体ハンド相対関係と、前記ロボット目標作業位置相対関係とに基づいて、前記作業ロボットが把持した物体の位置変化が、前記教示データに含まれる前記位置変化に沿うように前記作業ロボットの動作軌道を生成するロボット制御装置。
【発明の効果】
【0008】
本発明のロボット制御装置によれば、把持対象の物体がバラ積み状態で置かれている場合や、置かれている姿勢がランダムに変わる場合でも、ロボットがその物体を把持して穴に嵌合する動作を少ない教示回数で実現することができる。
【図面の簡単な説明】
【0009】
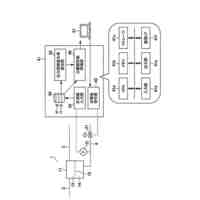
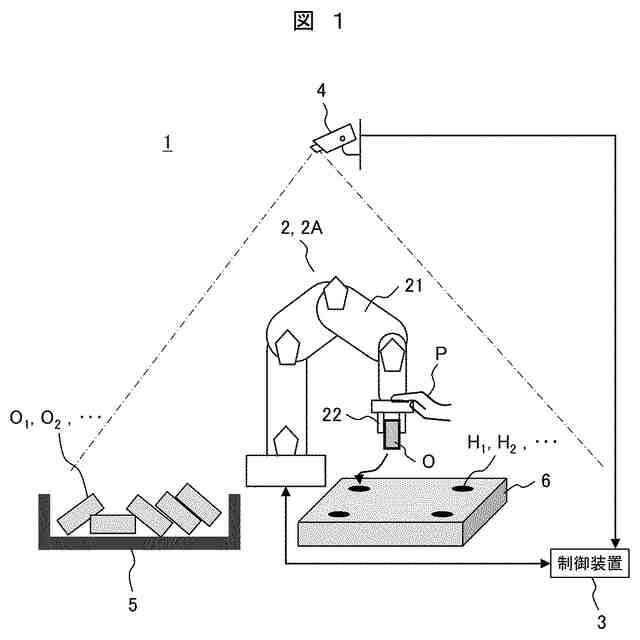
実施例1におけるロボット制御システムの全体構成
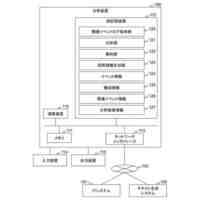
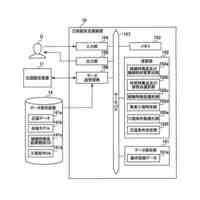
実施例1における制御装置の構成例
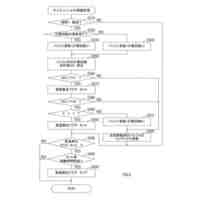
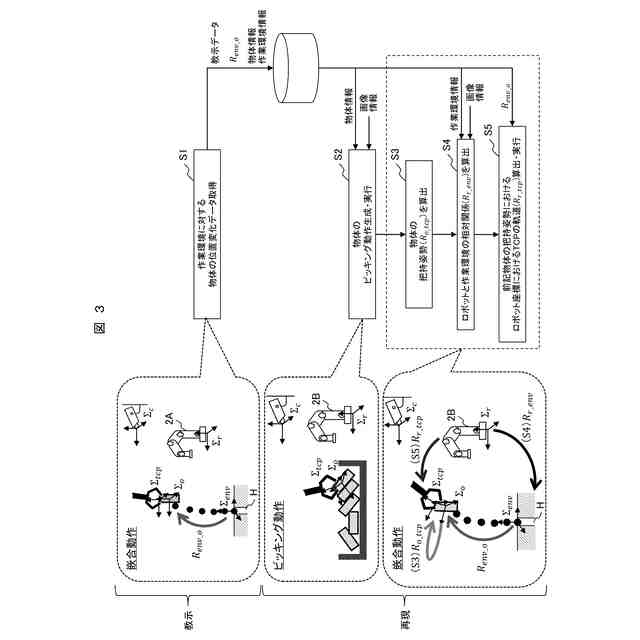
実施例1における教示と再現の処理の流れ
実施例1における教示データの生成
実施例1におけるピッキング動作生成
実施例1における把持姿勢の算出
実施例1における作業環境の認識
実施例1における教示作業を再現する軌道の算出
実施例2におけるロボット制御システムの全体構成
実施例2における遠隔制御の構成例
実施例2における教示と再現の処理の流れ
実施例2における教示データの生成
実施例2における教示作業の再現
実施例3におけるロボット制御システムの全体構成
実施例3における教示と再現の処理の流れ
実施例3におけるピッキング動作生成部
実施例4におけるロボット制御システムの全体構成
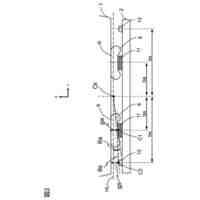
ロボットの作業例
【発明を実施するための形態】
【0010】
以下、図面を用いて、本発明のロボット制御装置の実施例を説明するが、それに先立ち、ロボット制御装置がロボットに実施させる作業例を、図18を用いて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
鉄道車両
今日
株式会社日立製作所
ガス分離システム
今日
株式会社日立製作所
調停案提示システム
1日前
株式会社日立製作所
治療効果予測システムおよび方法
1日前
株式会社日立製作所
計算機システム及び障害対処支援方法
1日前
株式会社日立製作所
圧延設定支援装置及び圧延設定支援方法
今日
株式会社日立製作所
燃料電池ブロックおよび燃料電池システム
1日前
株式会社日立製作所
搬送装置を制御する制御システム及び制御方法
今日
株式会社日立製作所
異常事象対処支援装置および異常事象対処支援方法
2日前
株式会社日立製作所
管路推定システム、管路推定方法、および管路推定プログラム
今日
個人
フラワーホッチキス。
3日前
川崎重工業株式会社
ロボット
16日前
株式会社竹中工務店
補助セット
15日前
株式会社不二越
ロボット
15日前
川崎重工業株式会社
ハンド
7日前
株式会社不二越
移動ロボットシステム
18日前
工機ホールディングス株式会社
作業機
7日前
トヨタ自動車株式会社
ロボット
10日前
株式会社不二越
エッジ仕上げ装置
28日前
川崎重工業株式会社
塗装システム
7日前
本田技研工業株式会社
装置
21日前
トヨタ自動車株式会社
軌道生成装置
10日前
工機ホールディングス株式会社
作業機
7日前
シンフォニアテクノロジー株式会社
搬送装置
18日前
アネックスツール株式会社
ドライバービット
14日前
川崎重工業株式会社
ワーク搬送ロボット
7日前
株式会社不二越
ロボットに用いる伝送路
今日
株式会社マキタ
回転打撃工具
10日前
ワールド技研株式会社
ロボットセル装置
15日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
28日前
NTN株式会社
ハンド
16日前
山九株式会社
レンチ保持治具
10日前
トヨタ自動車株式会社
ロボットの制御装置
14日前
セイコーエプソン株式会社
ロボット
14日前
NTN株式会社
作業装置
14日前
川崎重工業株式会社
ロボット
14日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ