TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025159439
公報種別
公開特許公報(A)
公開日
2025-10-21
出願番号
2024061987
出願日
2024-04-08
発明の名称
ロボットハンド制御システム
出願人
学校法人立命館
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20251014BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】粉体、粘体、細断物などの材料の多種類少量投入の対応が可能なロボットハンド制御システムを提供する。
【解決手段】ロボットアーム移動モータM1,升回転モータM2にて升を駆動制御することにより、収納容器に収納されている対象物を掬い上げ、その掬い上げた対象物を升内に入れる量を調整するため、ヘラ回転モータM3にてヘラを駆動制御する。そして、升内に入った対象物のうち盛り上がった部分を収納容器に配置されている升切り板に接触させて升切りするため、ロボットアーム移動モータM1,升回転モータM2にて升を駆動制御する。
【選択図】図4
特許請求の範囲
【請求項1】
対象物が収納され、升切り板が配置された所定の容器と、
ロボットハンドと、
先端に前記ロボットハンドを装着するアームを有するロボット本体と、
前記ロボット本体のアームを駆動して前記ロボットハンドを移動させるロボットアーム動作部と、
制御部と、を有し、
前記ロボットハンドは、
前記所定の容器に収納されている前記対象物を掬い上げることができる上面に開口部を有する升と、
前記升の開口部から前記対象物を掬い上げる動作を実行させる升動作部と、
前記升の中で移動可能に配置されているヘラと、
前記升の中で前記ヘラの配置位置を移動させるヘラ動作部と、を有し、
前記制御部は、
前記対象物を掬い上げるよう前記ロボットアーム動作部及び前記升動作部を駆動制御する升駆動制御手段と、
前記升で前記対象物の掬い上げる量を調整するために前記升の中の前記ヘラの配置位置を移動させるよう前記ヘラ動作部を駆動制御するヘラ駆動制御手段と、有し、
前記升駆動制御手段は、前記ロボットアーム動作部及び前記升動作部を駆動制御することにより、前記所定の容器に収納されている前記対象物を前記ヘラにより調整された量を掬い上げると共に、
前記升内に入った前記対象物のうち盛り上がった部分を前記升切り板に接触させて升切りするため、前記ロボットアーム動作部及び前記升動作部を駆動制御してなるロボットハンド制御システム。
続きを表示(約 1,900 文字)
【請求項2】
前記升駆動制御手段は、前記升切り板に接触させて升切りした後、前記所定の容器とは別の他の容器に、前記升内に入った前記対象物を移し替えるべく、前記ロボットアーム動作部及び前記升動作部を駆動制御し、さらに、
前記ヘラ駆動制御手段は、前記ヘラを前記対象物の移し替える方向に移動させるよう前記ヘラ動作部を駆動制御してなる請求項1に記載のロボットハンド制御システム。
【請求項3】
前記升内に入った前記対象物のうち盛り上がった部分を前記所定の容器に配置されている升切り板に接触させて升切りする前に、前記ヘラを前記升切り板側に前記ヘラ駆動制御手段にて駆動制御することで、前記対象物を前記升切り板に押圧してなる請求項1又は2に記載のロボットハンド制御システム。
【請求項4】
対象物が収納され、升切り板が配置された所定の容器と、
ロボットハンドと、
先端に前記ロボットハンドを装着するアームを有するロボット本体と、
前記ロボット本体のアームを駆動して前記ロボットハンドを移動させるロボットアーム動作部と、
制御部と、を有し、
前記ロボットハンドは、
前記所定の容器に収納されている前記対象物を掬い上げることができる上面に開口部を有する半円筒形状の升と、
前記升を回動させて前記開口部から前記対象物を掬い上げる動作を実行する升動作部と、
前記升の中で前記升の回動軸と同軸で回動可能に配置されているヘラと、
前記ヘラを回動させて配置位置を移動させるヘラ動作部と、を有し、
前記制御部は、
前記升を回動させて前記対象物を掬い上げるよう前記ロボットアーム動作部及び前記升動作部を駆動制御する升駆動制御手段と、
前記升を回動させた際に前記開口部から前記対象物の掬い上げる量を調整するために前記升の中の前記ヘラの配置位置を移動させるよう前記ヘラ動作部を駆動制御するヘラ駆動制御手段と、を有し、
前記升駆動制御手段は、前記ロボットアーム動作部及び前記升動作部を駆動制御することにより前記升を回動させ、前記所定の容器に収納されている前記対象物を前記ヘラの配置位置で調整された量を掬い上げると共に、
前記升内に入った前記対象物のうち前記開口部で盛り上がった部分を前記所定の容器に配置された升切り板に接触させて升切りするため、前記ロボットアーム動作部及び前記升動作部を駆動制御してなるロボットハンド制御システム。
【請求項5】
前記制御部は、
前記升動作部の動作電流を検出する升動作電流検出手段をさらに有し、
前記升駆動制御手段は、前記升による前記対象物の掬い上げ動作を実行するために前記所定の容器内に前記升を降下させた際、前記升動作電流検出手段により検出した電流値の変化により前記升が前記所定の容器の底面に当接したと判断し、その降下位置を維持した状態で前記所定の容器底面に沿って前記升を移動させることにより、前記所定の容器の底面付近の前記対象物を掬い上げるよう動作させる請求項4に記載のロボットハンド制御システム。
【請求項6】
前記制御部は、
前記ヘラ動作部の動作電流を検出するヘラ動作電流検出手段をさらに有し、
前記升内に入った前記対象物のうち盛り上がった部分を前記所定の容器に配置された前記升切り板に接触させて升切りする前に、前記ヘラ駆動制御手段が、前記ヘラ動作電流検出部で動作電流の変化を検出するまで前記ヘラを前記升切り板の方向に回動させて前記対象物を前記升切り板に押圧してなる請求項4又は5に記載のロボットハンド制御システム。
【請求項7】
前記制御部は、
前記升動作部の駆動により前記升の回転角度を検出する升回転角度検出手段と、
前記ヘラ動作部の駆動により前記ヘラの回転角度を検出するヘラ回転角度検出手段と、
前記ロボットアーム動作部の駆動により前記アームの回転角度を検出するアーム回転角度検出手段と、さらに有し、
前記アーム回転角度検出手段、前記升回転角度検出手段及び前記ヘラ回転角度検出手段の検出値に基づき、升駆動制御手段にて、前記ロボット本体のアーム及び前記ロボットハンドの動作制御を行うとともに、前記ヘラ回転角度検出手段の検出結果により、前記ヘラ駆動制御手段にて、前記升で掬い上げる前記対象物の量を調整する請求項4又は5に記載のロボットハンド制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンド制御システムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
少量の粉体、粘体、細断物のハンドリングは、食品業界、製造業などで省人化の課題として残されている。FOOMA委員会(2022年~2024年)でのアンケート調査においても、食品製造において、原材料投入が共通する省人化課題であり、製造業においても、粉体、粘体などの材料の多種類少量投入が課題として挙がっている。すなわち、少量の粉体、粘体、細断物の計量とハンドリングは、費用対効果などの問題で自動化が遅れている。
【0003】
この点、例えば、特許文献1に記載のような技術が知られている。この特許文献1に記載の技術は、掬い上げた把持物を定量となるよう、升切板で升切りするものである。
【先行技術文献】
【特許文献】
【0004】
特開平5-79880号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のような技術は、製造業において課題となっている粉体、粘体などの材料の多種類少量投入への対応ができていないという問題があった。また、多種類少量投入へ対応しようとすると、掬い上げる容器自体を交換するしかないため、非常に手間がかかり、実質、多種類少量投入への対応は困難であるという問題があった。
【0006】
そこで、本発明は、上記問題に鑑み、粉体、粘体、細断物などの材料の多種類少量投入の対応が可能なロボットハンド制御システムを提供することを目的としている。
【課題を解決するための手段】
【0007】
上記本発明の目的は、以下の手段によって達成される。なお、括弧内は、後述する実施形態の参照符号を付したものであるが、本発明はこれに限定されるものではない。
【0008】
請求項1に係るロボットハンド制御システムは、
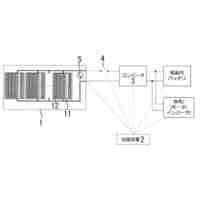
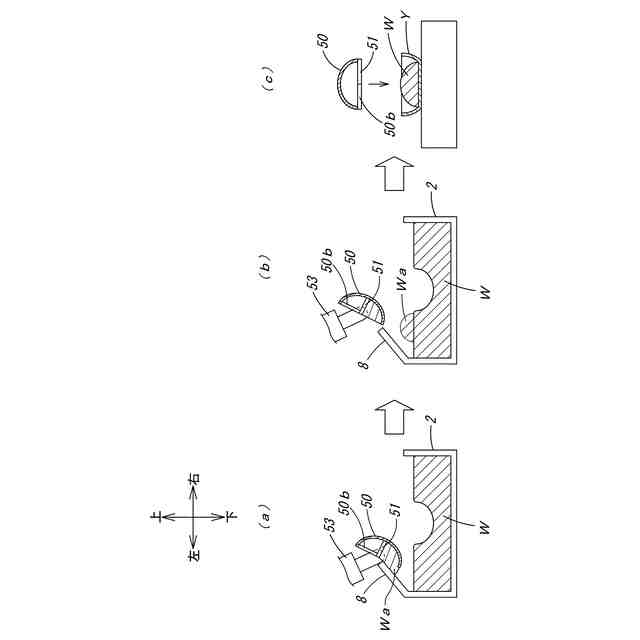
対象物(W)が収納され、升切り板(8)が配置された所定の容器(収納容器2)と、
ロボットハンド(5)と、
先端に前記ロボットハンド(5)を装着するアームを有するロボット本体(ロボット4)と、
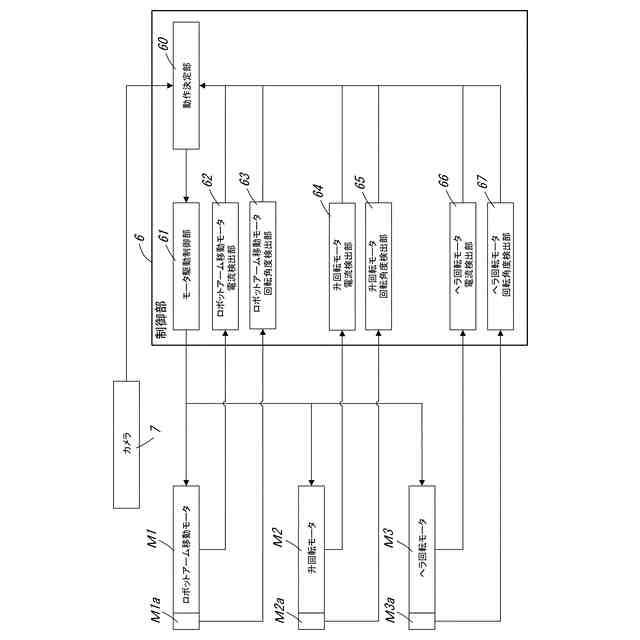
前記ロボット本体(ロボット4)のアームを駆動して前記ロボットハンド(5)を移動させるロボットアーム動作部(ロボットアーム移動モータM1)と、
制御部(6)と、を有し、
前記ロボットハンド(5)は、
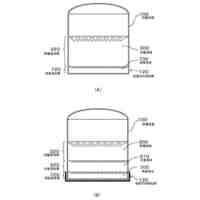
前記所定の容器(収納容器2)に収納されている前記対象物(W)を掬い上げることができる上面(50a)に開口部を有する升(50)と、
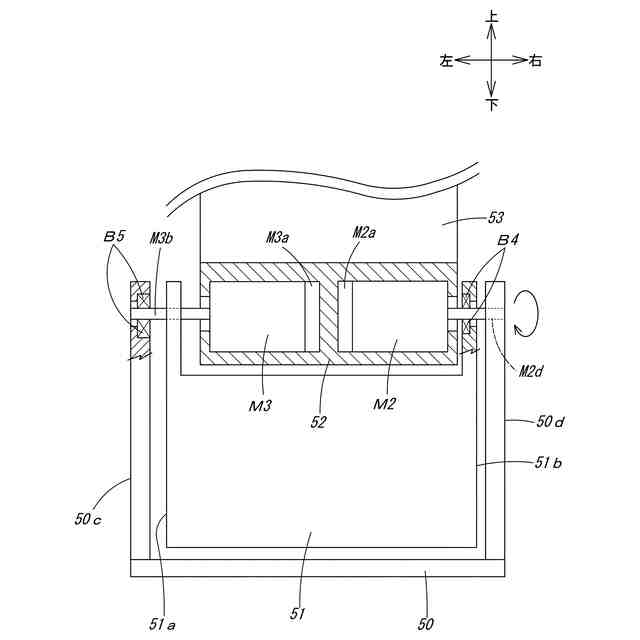
前記升(50)の開口部から前記対象物(W)を掬い上げる動作を実行させる升動作部(升回転モータM2,第1ギアM2b、第2ギアM2c,升回転軸M2d)と、
前記升(50)の中で移動可能に配置されているヘラ(51)と、
前記升(50)の中で前記ヘラ(51)の配置位置を移動させるヘラ動作部(ヘラ回転モータM3,ヘラ回転軸M3b)と、を有し、
前記制御部(6)は、
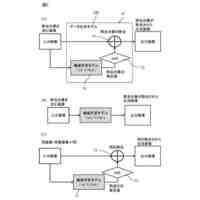
前記対象物(W)を掬い上げるよう前記ロボットアーム動作部(ロボットアーム移動モータM1)及び前記升動作部(升回転モータM2,第1ギアM2b、第2ギアM2c,升回転軸M2d)を駆動制御する升駆動制御手段(動作決定部60)と、
前記升(50)で前記対象物(W)の掬い上げる量を調整するために前記升(50)の中の前記ヘラ(51)の配置位置を移動させるよう前記ヘラ動作部(ヘラ回転モータM3,ヘラ回転軸M3b)を駆動制御するヘラ駆動制御手段(動作決定部60)と、有し、
前記升駆動制御手段(動作決定部60)は、前記ロボットアーム動作部(ロボットアーム移動モータM1)及び前記升動作部(升回転モータM2,第1ギアM2b、第2ギアM2c,升回転軸M2d)を駆動制御することにより、前記所定の容器(収納容器2)に収納されている前記対象物(W)を前記ヘラ(51)により調整された量を掬い上げると共に、
前記升(50)内に入った前記対象物(W)のうち盛り上がった部分(Wa)を前記升切り板(8)に接触させて升切りするため、前記ロボットアーム動作部(ロボットアーム移動モータM1)及び前記升動作部(升回転モータM2,第1ギアM2b、第2ギアM2c,升回転軸M2d)を駆動制御してなることを特徴としている。
【0009】
請求項2に係るロボットハンド制御システムは、上記請求項1に記載のロボットハンド制御システム(1)において、
前記升駆動制御手段(動作決定部60)は、前記升切り板(8)に接触させて升切りした後、前記所定の容器(収納容器2)とは別の他の容器(盛り付け用容器Y)に、前記升(50)内に入った前記対象物(W)を移し替えるべく、前記ロボットアーム動作部(ロボットアーム移動モータM1)及び前記升動作部(升回転モータM2,第1ギアM2b、第2ギアM2c,升回転軸M2d)を駆動制御し、さらに、
前記ヘラ駆動制御手段(動作決定部60)は、前記ヘラ(51)を前記対象物(W)の移し替える方向に移動させるよう前記ヘラ動作部(ヘラ回転モータM3,ヘラ回転軸M3b)を駆動制御してなることを特徴としている。
【0010】
請求項3に係るロボットハンド制御システムは、上記請求項1又は2に記載のロボットハンド制御システム(1)において、前記升(50)内に入った前記対象物(W)のうち盛り上がった部分(Wa)を前記所定の容器(収納容器2)に配置されている升切り板(8)に接触させて升切りする前に、前記ヘラ(51)を前記升切り板(8)側に前記ヘラ駆動制御手段(動作決定部60)にて駆動制御することで、前記対象物(W)を前記升切り板(8)に押圧してなることを特徴としている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
学校法人立命館
光演算装置
4か月前
学校法人立命館
液面レベルセンサ
2か月前
学校法人立命館
情報埋め込み方法
2か月前
学校法人立命館
バイオ炭の分析方法
1か月前
学校法人立命館
センサ及びセンサシステム
1か月前
学校法人立命館
ロボットハンド制御システム
10日前
学校法人立命館
流路構造、流路構造製造方法
5か月前
株式会社豊田自動織機
電力変換装置
21日前
株式会社東洋レーベル
入眠促進装置
5か月前
三洋化成工業株式会社
金属回収方法
3か月前
学校法人立命館
筋組織カルシウム蓄積を抑制するビタミンD作用
6か月前
学校法人立命館
フェーズドアレーアンテナ装置及び無線通信装置
3か月前
学校法人立命館
個人認証装置、個人認証方法、個人認証プログラム
2か月前
学校法人立命館
処理装置、音響システム、先行音効果を生じさせる方法
1か月前
学校法人立命館
異種タンパク質の大量生産が可能なナス科植物の四重変異体
5か月前
兵庫県
強化炭素繊維、炭素繊維シート及び炭素繊維強化剤
24日前
学校法人立命館
メッシュ生成システム、コンピュータ実装方法及びコンピュータプログラム
5か月前
学校法人立命館
周波数損失関数を用いた画質改善方法、コンピュータシステム及びコンピュータプログラム
5か月前
学校法人立命館
残差推定ネットワークを用いた画質改善方法、コンピュータシステム及びコンピュータプログラム
5か月前
日産自動車株式会社
車載用太陽光発電システム及び車載用太陽電池パネルの動作電圧を決定する方法
7か月前
白山工業株式会社
液体貯蔵容器の内側底部を保護する方法、及び、液体貯蔵容器の内側底部を保護する構造
6か月前
国立大学法人 鹿児島大学
生成AIの調整用データのデータ構造、対話システム、調整方法及びプログラム
1か月前
個人
フラワーホッチキス。
17日前
川崎重工業株式会社
ロボット
1か月前
株式会社不二越
ロボット
29日前
株式会社竹中工務店
補助セット
29日前
川崎重工業株式会社
ハンド
21日前
株式会社マキタ
ハンマドリル
4日前
株式会社マキタ
ハンマドリル
4日前
株式会社不二越
移動ロボットシステム
1か月前
トヨタ自動車株式会社
ロボット
24日前
工機ホールディングス株式会社
作業機
21日前
本田技研工業株式会社
装置
1か月前
株式会社不二越
エッジ仕上げ装置
1か月前
川崎重工業株式会社
塗装システム
21日前
株式会社安川電機
ロボット
1日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ