TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025164378
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024068319
出願日
2024-04-19
発明の名称
ロボット
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
主分類
B25J
9/10 20060101AFI20251023BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】関節角度をダイレクトに検出する回転センサによる回転検出の精度向上に有効なロボットを提供する。
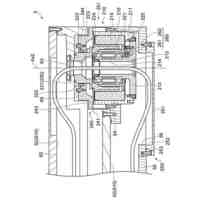
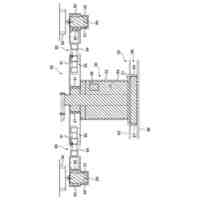
【解決手段】ロボット2は、関節軸Axにおいて互いに連結される第1リンク及び第2リンクと、第2リンクに固定され、第1リンクに対し関節軸Axまわりに回転する回転部50と、保持部材70に保持され、回転部50の回転を検出する回転センサ40と、第1リンクに固定されて回転センサ40を保持し、関節軸Axまわりに回転可能となるように回転部50を保持する保持部材70と、を備える。
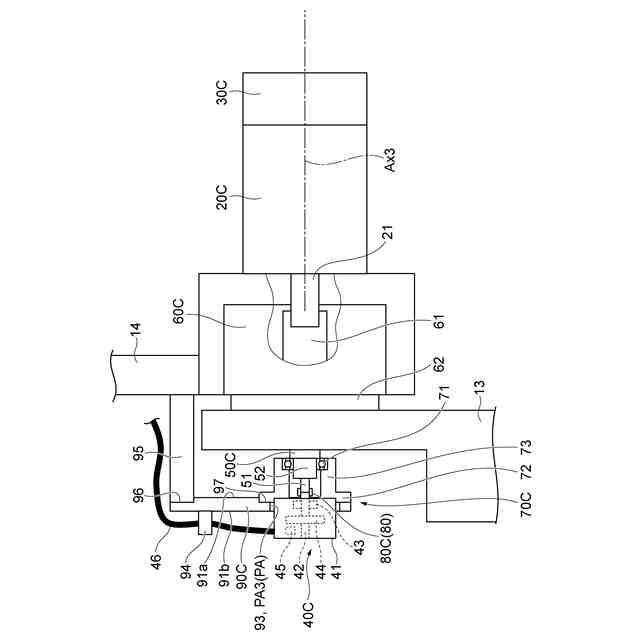
【選択図】図3
特許請求の範囲
【請求項1】
関節軸において互いに連結される第1リンク及び第2リンクと、
前記第2リンクに固定され、第1リンクに対し前記関節軸まわりに回転する回転部と、
前記回転部の回転を検出する回転センサと、
前記第1リンクに固定されて前記回転センサを保持し、前記関節軸まわりに回転可能となるように前記回転部を保持する保持部材と、
を備えるロボット。
続きを表示(約 1,200 文字)
【請求項2】
前記回転部は、前記第2リンクから前記回転センサに向かって突出したシャフトであり、
前記保持部材は軸受けを介して前記シャフトを保持する、
請求項1記載のロボット。
【請求項3】
前記第1リンクに対する前記保持部材の位置を調節可能にする位置調節部を更に備える、
請求項1又は2記載のロボット。
【請求項4】
前記保持部材とは別体であり、前記関節軸から遠ざかる方に向かって伸びるように前記保持部材に固定され、前記第1リンクに固定されるブリッジ部材を更に備える、
請求項1記載のロボット。
【請求項5】
前記回転センサから前記第1リンクに配線されるケーブルと、
前記ケーブルを前記ブリッジ部材に沿わせるケーブルガイドと、
を更に備える、
請求項4記載のロボット。
【請求項6】
前記ブリッジ部材は、前記第2リンクに面する第1面と、前記第1面の反対面である第2面と、を有し、
前記ケーブルガイドは、前記ケーブルを前記第2面に沿わせる、
請求項5記載のロボット。
【請求項7】
前記ブリッジ部材は、前記関節軸に沿った方向において、互いに同じ方に面した第1接続面及び第2接続面を有し、
前記第1接続面が前記第1リンクに接するように前記第1リンクに固定され、
前記第2接続面が前記保持部材に接するように前記保持部材に固定される、
請求項4~6のいずれか一項記載のロボット。
【請求項8】
前記回転部は、前記第2リンクから前記回転センサに向かって突出したシャフトであり、
前記回転センサは、
前記保持部材に保持されるセンサ本体と、
前記関節軸まわりに前記センサ本体に対し回転するセンサシャフトと、
前記センサ本体に対する前記センサシャフトの回転を検出する検出部と、
を有し、
前記ロボットは、前記シャフトを前記センサシャフトに連結する継手部材を更に備える、
請求項1記載のロボット。
【請求項9】
前記保持部材は、
前記センサ本体を保持する本体保持部と、
前記本体保持部から突出し、前記関節軸まわりに前記シャフトを包囲して前記シャフトを保持するシャフト保持部と、
を有し、
前記継手部材は、前記シャフト保持部内で前記シャフトを前記センサシャフトに連結する、
請求項8記載のロボット。
【請求項10】
前記関節軸まわりの前記本体保持部の外周と、前記関節軸まわりの前記シャフト保持部の内周及び外周とが、互いに同心の円形である、
請求項9記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、モータと、モータの駆動力をリンクに伝達する減速機と、減速機の出力軸の回転角度を検出する検出部と、を備えるロボットが開示されている。検出部は、軸継手を介して減速機の出力軸に連結される。
【先行技術文献】
【特許文献】
【0003】
特開2012-171072号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、関節角度をダイレクトに検出する回転センサによる回転検出の精度向上に有効なロボットを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係るロボットは、関節軸において互いに連結される第1リンク及び第2リンクと、第2リンクに固定され、第1リンクに対し関節軸まわりに回転する回転部と、保持部材に保持され、回転部の回転を検出する回転センサと、第1リンクに固定されて回転センサを保持し、関節軸まわりに回転可能となるように回転部を保持する保持部材と、を備える。
【発明の効果】
【0006】
本開示によれば、関節角度をダイレクトに検出する回転センサによる回転検出の精度向上に有効なロボットを提供することができる。
【図面の簡単な説明】
【0007】
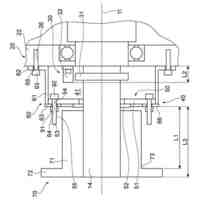
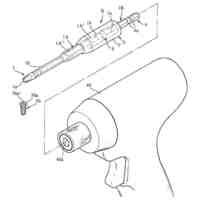
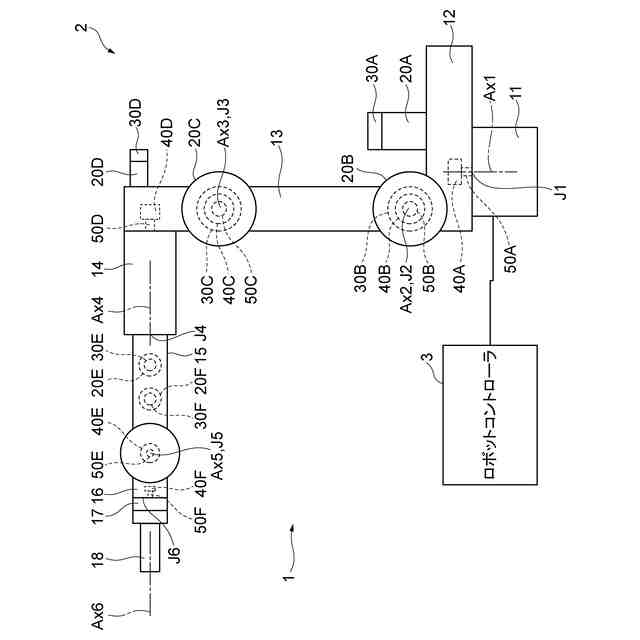
ロボットシステムの構成を例示する模式図である。
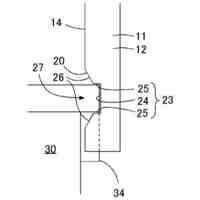
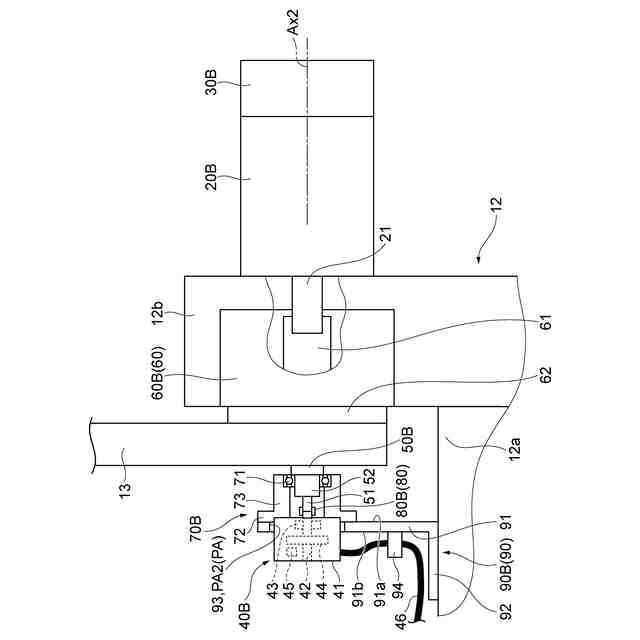
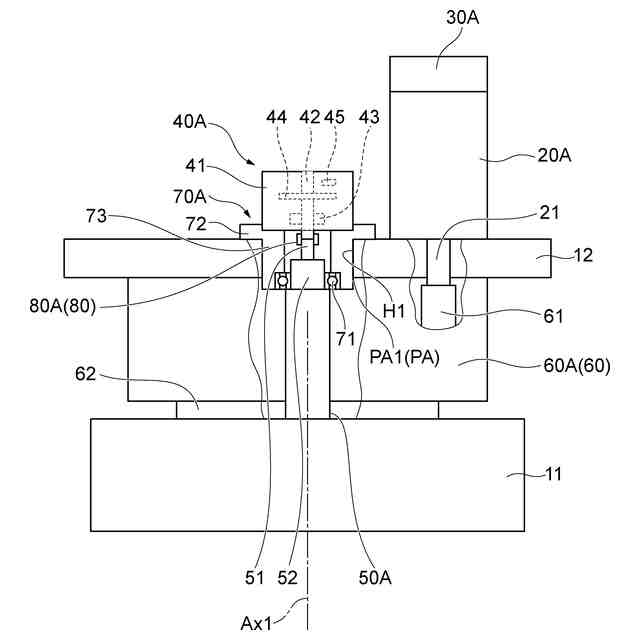
回転センサの周辺構造を例示する模式図である。
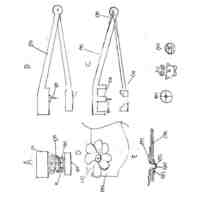
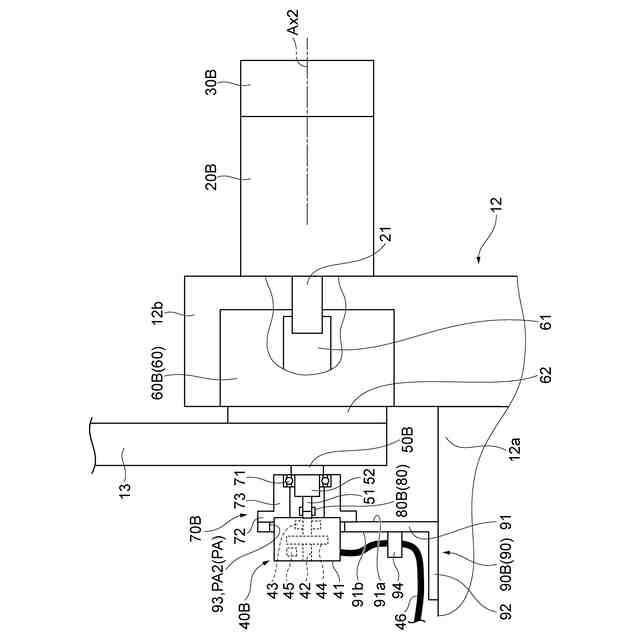
回転センサの周辺構造の変形例を示す模式図である。
回転センサの周辺構造の他の変形例を示す模式図である。
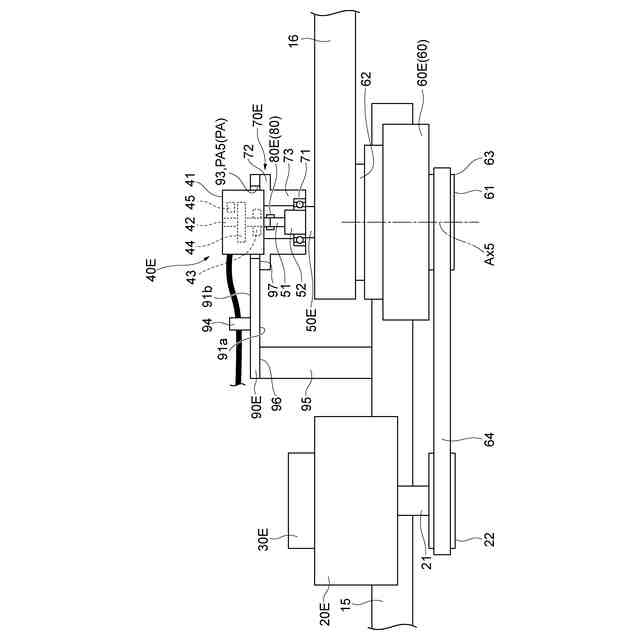
回転センサの周辺構造の更に他の変形例を示す模式図である。
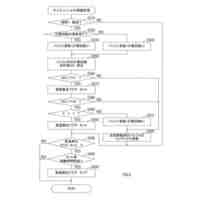
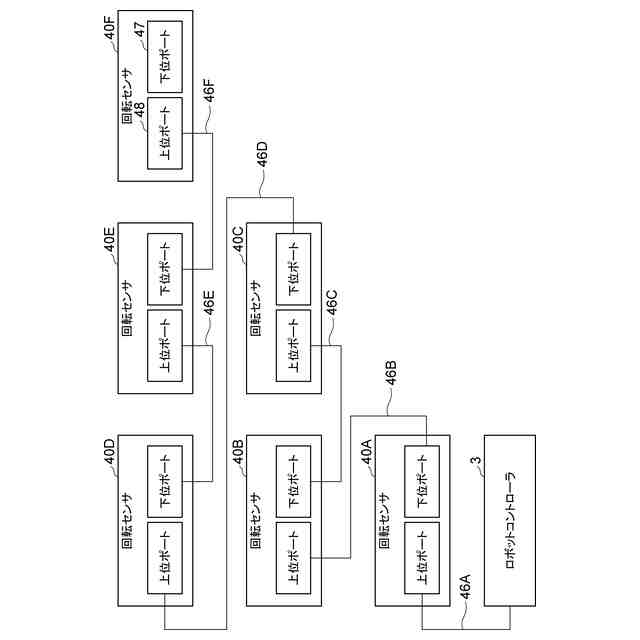
ロボットコントローラに対する回転センサの接続を例示する模式図である。
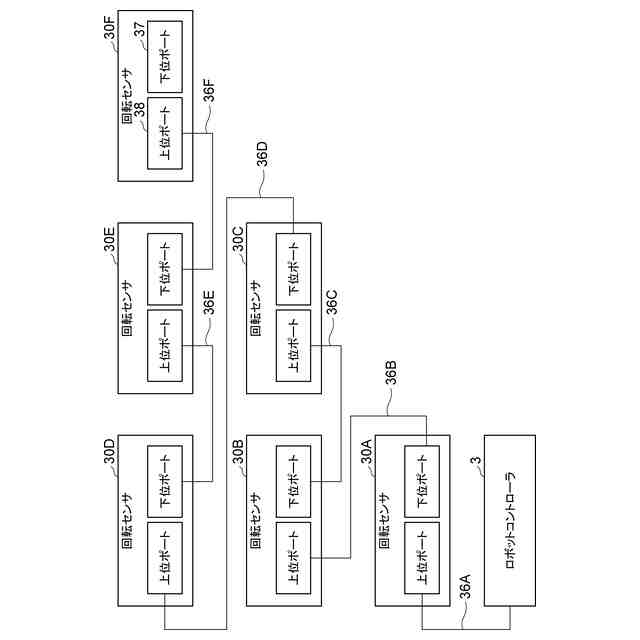
ロボットコントローラに対するモータ回転センサの接続を例示する模式図である。
【発明を実施するための形態】
【0008】
以下、実施形態について、図面を参照しつつ詳細に説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。
【0009】
図1に示すロボットシステム1は、ワークに対する作業をロボット2に実行させるシステムである。ワークに対する作業の例としては、組み立て、溶接、塗装、検査、搬送等が挙げられる。例えばロボットシステム1は、ロボット2と、ロボット2を制御するロボットコントローラ3とを備える。
【0010】
ロボット2は、シリアルリンク型であり、少なくとも、関節軸において互いに連結された一対のリンクを有する。例えばロボット2は、垂直多関節ロボットであり、リンク11,12,13,14,15,16,17と、エンドエフェクタ18と、モータ20A,20B,20C,20D,20E,20Fと、モータ回転センサ30A,30B,30C,30D,30E,30Fと、回転センサ40A,40B,40C,40D,40E,40Fとを有する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社安川電機
ロボット
2日前
株式会社安川電機
モータ及び駆動システム
23日前
株式会社安川電機
エンコーダ及びエンコーダシステム
16日前
株式会社安川電機
システム、ユニット、及び製造方法
23日前
株式会社安川電機
ロボット及び基板搬送装置
1か月前
個人
フラワーホッチキス。
18日前
川崎重工業株式会社
ロボット
1か月前
株式会社三協システム
移載装置
1か月前
株式会社竹中工務店
補助セット
1か月前
株式会社不二越
ロボット
1か月前
川崎重工業株式会社
ハンド
22日前
株式会社マキタ
ハンマドリル
5日前
株式会社マキタ
ハンマドリル
5日前
トヨタ自動車株式会社
ロボット
25日前
工機ホールディングス株式会社
作業機
22日前
株式会社不二越
移動ロボットシステム
1か月前
川崎重工業株式会社
塗装システム
22日前
株式会社安川電機
ロボット
2日前
株式会社不二越
エッジ仕上げ装置
1か月前
本田技研工業株式会社
装置
1か月前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
垂直多関節ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
25日前
アネックスツール株式会社
ドライバービット
29日前
トヨタ自動車株式会社
ロボットハンド
2日前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
ライオン株式会社
移載システム
1か月前
工機ホールディングス株式会社
作業機
22日前
株式会社不二越
ロボットに用いる伝送路
15日前
株式会社マキタ
現場用作業機
11日前
ワールド技研株式会社
ロボットセル装置
1か月前
株式会社マキタ
回転打撃工具
25日前
川崎重工業株式会社
ワーク搬送ロボット
22日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
1か月前
セイコーエプソン株式会社
ロボット
29日前
山九株式会社
レンチ保持治具
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ