TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025159754
公報種別
公開特許公報(A)
公開日
2025-10-22
出願番号
2024062481
出願日
2024-04-09
発明の名称
道路情報補正装置
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G08G
1/16 20060101AFI20251015BHJP(信号)
要約
【課題】自車位置測位情報および地図情報を用いて取得した道路情報を、道路形状または西日等の影響に関わらず、より高い精度で補正可能な道路情報補正装置を提供する。
【解決手段】第1道路情報と比較用道路情報に基づき、自車両位置に対する道路情報の補正量を算出するものにおいて、
比較用道路情報は、経時的に取得された自車両近傍の左右区画線位置情報と、自車両の車速およびヨーレートの情報を含む車両状態量に基づいて取得する。
【選択図】図1
特許請求の範囲
【請求項1】
自車位置測位情報および地図情報に基づき、自車両位置に対して相対的に第1道路情報を取得する第1道路情報取得部と、
周辺監視装置から取得される自車両走行車線の左右区画線位置情報と、
車両状態量監視装置から取得される自車両の車速、および自車両のヨ―レートの情報を含む車両状態量と、
経時的に取得された複数の前記左右区画線位置情報、および前記車両状態量に基づき、自車両位置に対して相対的に第2道路情報を生成する第2道路情報取得部と、
前記第2道路情報を比較用道路情報とし、前記第1道路情報と前記比較用道路情報に基づき、前記第1道路情報に関する補正量を算出する補正量算出部と、
前記補正量算出部で算出した補正量をもとに、自車両位置と前記第1道路情報のいずれか一方、または双方を補正する道路情報補正部を備えた道路情報補正装置。
続きを表示(約 1,400 文字)
【請求項2】
自車両前方を監視する前方監視装置と、
前記前方監視装置から、自車両位置に対する第3道路情報を取得する第3道路情報取得部を備え、
前記補正量算出部は、前記第3道路情報の信頼度が閾値未満と判断した場合は前記第2道路情報を前記比較用道路情報とし、前記第3道路情報の信頼度が閾値以上と判断した場合は前記第3道路情報を前記比較用道路情報とすることを特徴とする請求項1に記載の道路情報補正装置。
【請求項3】
前記補正量算出部で前回以前に算出された補正量に基づき、今回の補正量を推定する補正量推定部を備え、
前記補正量算出部は、前記比較用道路情報の信頼度が閾値未満と判断した場合は、前記補正量推定部の推定値に基づき前記補正量を算出することを特徴とする請求項2に記載の道路情報補正装置。
【請求項4】
前記周辺監視装置は、自車両の左右に設けられたサイドカメラであることを特徴とする請求項1から3までのいずれか1項に記載の道路情報補正装置。
【請求項5】
前記第2道路情報取得部は、今回の自車両位置を原点とした座標系において、前記周辺監視装置により今回の前記左右区画線位置情報を取得し、
前回生成された前記第2道路情報の前記左右区画線位置情報を、今回取得された車両状態量に基づいて今回の自車両位置を原点とした座標系における前記左右区画線位置情報に変換し、この変換された前回の前記左右区画線位置情報に、前記周辺監視装置により今回検出された前記左右区画線位置情報を追加した前記左右区画線位置情報を、今回の前記第2道路情報として生成することを特徴とする請求項1から3までのいずれか1項に記載の道路情報補正装置。
【請求項6】
前記補正量算出部は、前記第2道路情報に含まれる経時的に取得された複数の前記左右区画線位置情報を多項式近似して近似曲線情報へ変換し、
前記左右区画線位置情報のうち、取得から閾値以上の期間を経過したものは前記多項式近似から除くことを特徴とする請求項1から3までのいずれか1項に記載の道路情報補正装置。
【請求項7】
前記補正量算出部は、前記推定値に基づく前記補正量の使用期間が閾値以上となった場合、前記補正量を無効とすることを特徴とする請求項3に記載の道路情報補正装置。
【請求項8】
前記補正量算出部は、前記第3道路情報で示される道路の曲率、または道路の勾配が閾値以上である場合は、前記第3道路情報の信頼度が閾値未満と判断することを特徴とする請求項2または3に記載の道路情報補正装置。
【請求項9】
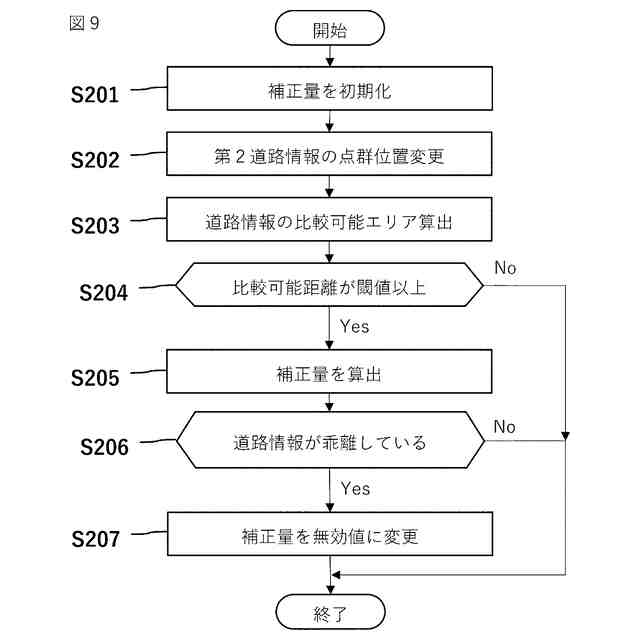
前記補正量算出部は、前記第1道路情報と前記比較用道路情報とが閾値以上に乖離していると判断した場合は前記補正量を無効とすることを特徴とする請求項1または2のいずれかに記載の道路情報補正装置。
【請求項10】
前記補正量算出部は、前記第1道路情報と前記比較用道路情報の重複している領域を比較可能エリアとし、前記比較可能エリアに含まれる前記第1道路情報と前記比較用道路情報に基づき補正量を算出することを特徴とする請求項1から3までのいずれか1項に記載の道路情報補正装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自車位置測位情報および地図情報に基づき自車両位置に対して相対的に取得された道路情報を、更に補正する道路情報補正装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、衛星から得られた自車位置測位情報および地図情報に基づいて、自車両位置に対する道路情報を取得し、この道路情報を用いて運転支援を行う技術の開発が進められている。
【0003】
高度な運転支援を行うためには、自車両位置に対して精度の高い道路情報を取得することが必要となる。そのためには、単に地図情報の精度を高めるだけでなく、自車両位置と地図情報との相対関係の精度、言わば自車両位置を地図上に正確に合致させる精度を高める必要がある。
しかしながら、衛星から得られる自車位置測位情報には稀に誤差が含まれる場合がある。これにより自車両位置と地図情報との相対関係に誤差が生じるため、自車両位置に対して地図情報から取得される道路情報の精度も悪化する場合が生じる。
【0004】
この対策として、自車両に搭載された監視装置等を用いて、自車両位置と道路情報との相対関係を補正する手段も検討されている。
例えば特許第3692910号では、自車両に搭載され進行方向前方を撮影するカメラから得られる情報を用いている。このカメラで撮像した前方画像情報から得られる道路情報、特に道路曲率情報と、地図から得られる道路情報とを比較し、その比較結果に基づき、地図から得られる道路情報を基準として自車両位置を補正する手段が公開されている。
【先行技術文献】
【特許文献】
【0005】
特許第3692910号
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許第3692910号のように進行方向前方を撮影するカメラを用いる場合、このようなカメラでは比較的遠距離まで広い範囲に亘って撮像される。このため、道路形状の大きな変化等の要因により、特に曲率または勾配の大きい道路状況では精度の高い道路情報を取得できない場合がある。また、このような進行方向前方を撮影するカメラは、光軸が比較的水平方向に近い角度で設けられるため、西日等の直射光の影響によるハレーションあるいはコントラストの低下等の要因により、道路情報の検出精度が低下することも考えられる。
このようにカメラから得られる道路情報の精度が低下することにより、地図から得られる道路情報との比較結果の精度も低下し、ひいては地図から得られる道路情報に対する自車両位置の補正精度を高めることが困難となっている。
【0007】
本開示は上記のような課題を解決するためになされたものであり、自車位置測位情報および地図情報を用いて取得した道路情報を、道路形状または西日等の影響に関わらず、より高い精度で補正可能な道路情報補正装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本開示に係る道路情報補正装置は、
自車位置測位情報および地図情報に基づき、自車両位置に対する第1道路情報を取得する第1道路情報取得部と、
周辺監視装置から取得される自車両走行車線の左右区画線位置情報と、
車両状態量監視装置から取得される自車両の車速、および自車両のヨ―レートの情報を含む車両状態量と、
経時的に取得された複数の前記左右区画線位置情報、および前記車両状態量に基づき、自車両位置に対する第2道路情報を生成する第2道路情報取得部と、
前記第2道路情報を比較用道路情報とし、前記第1道路情報と前記比較用道路情報に基づき、第1道路情報に関する補正量を算出する補正量算出部と、
補正量算出部で算出した補正量をもとに、自車両位置と前記第1道路情報のいずれかい一方、または双方を補正する道路情報補正部を備えたものである。
【発明の効果】
【0009】
本開示に係る道路情報補正装置によれば、周辺監視装置から取得される左右区画線位置情報を用いて自車両位置と道路情報の相対的関係を補正することが出来るため、道路形状または西日等の影響に関わらず、より高い精度で道路情報を補正することが出来る。
【図面の簡単な説明】
【0010】
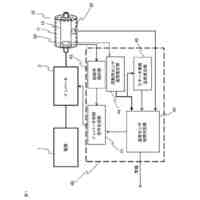
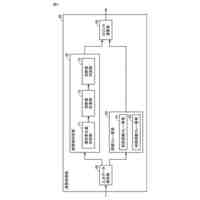
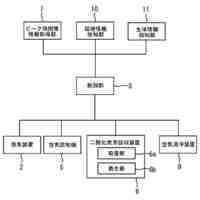
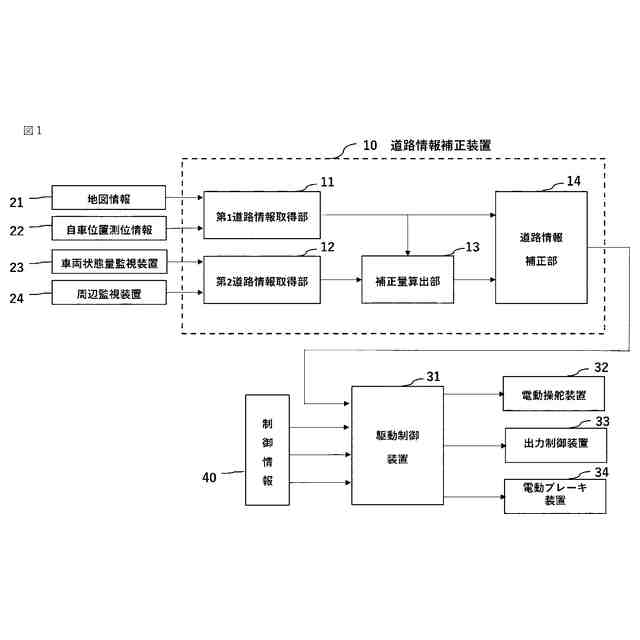
実施の形態1に係る道路情報補正装置の周辺装置を含む全体構成を示すブロック図である。
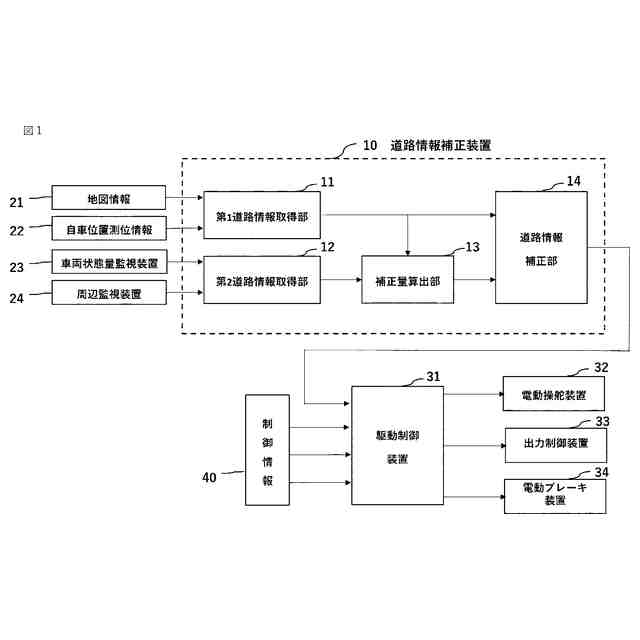
実施の形態1に係る道路情報補正装置の概略ハードウェア構成図である。
実施の形態1に係る道路情報補正装置の別例の概略ハードウェア構成図である。
実施の形態1に係る第1道路情報を説明するための模式図である。
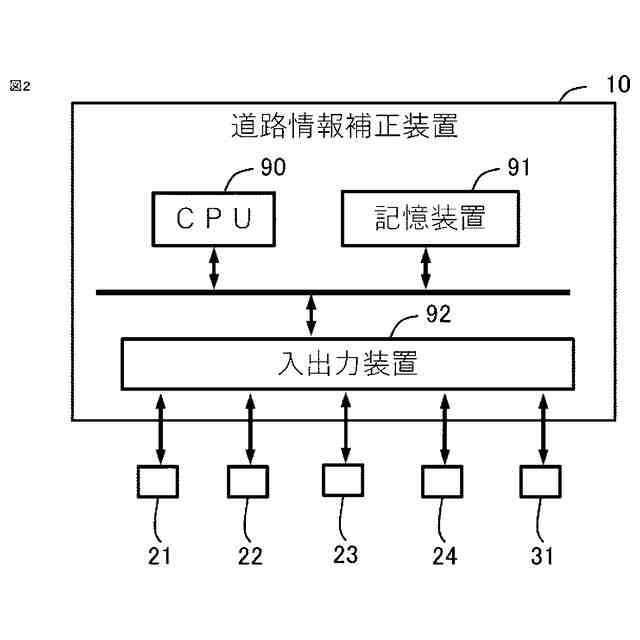
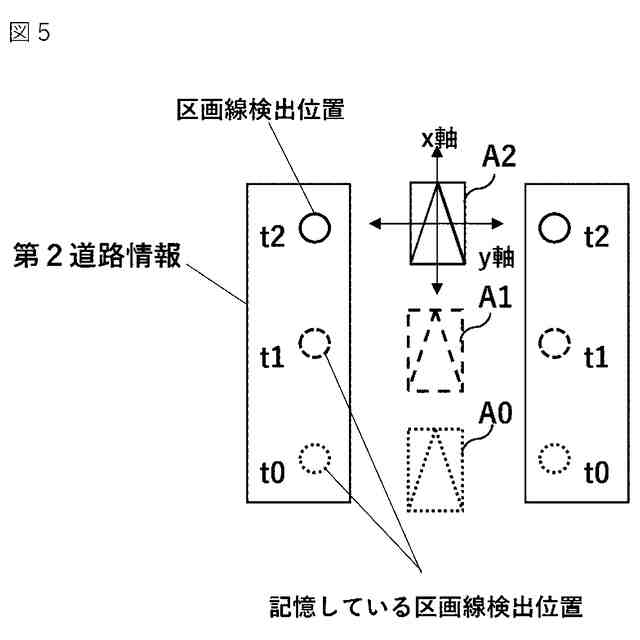
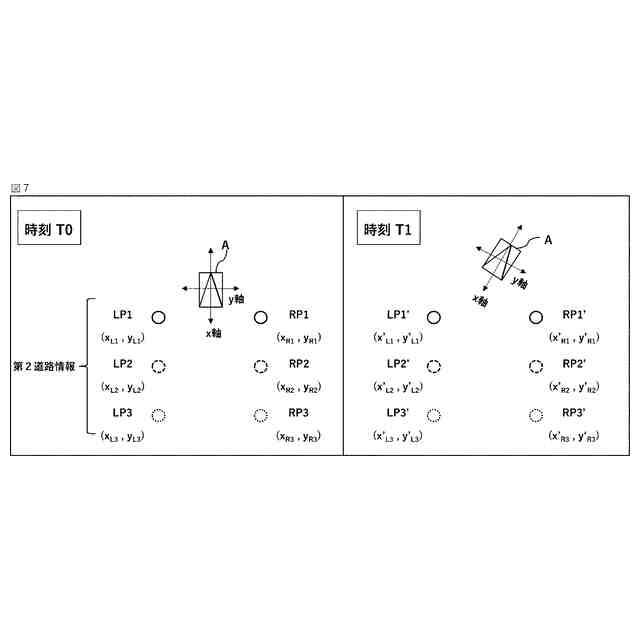
実施の形態1に係る第2道路情報を説明するための模式図である。
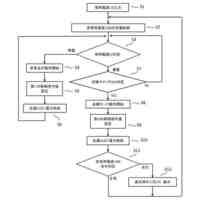
実施の形態1に係る第2道路情報取得部の処理を示すフローチャートである。
実施の形態1に係る第2道路情報取得部の座標変換処理を説明するための模式図である。
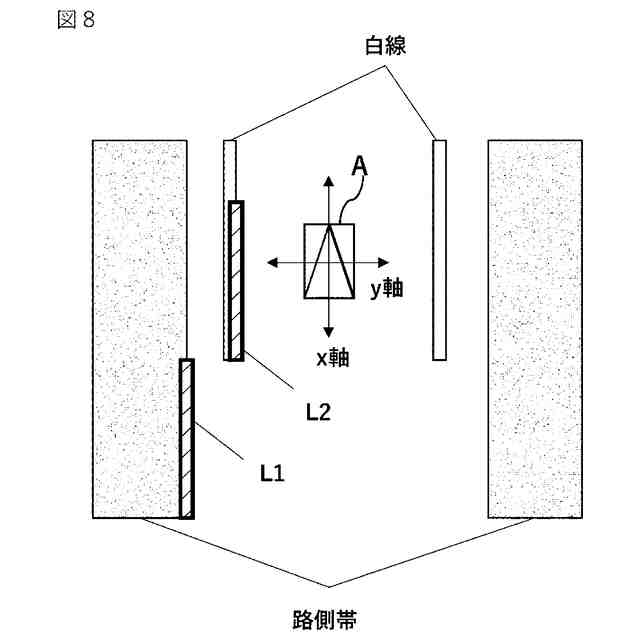
実施の形態1に係る周辺監視装置で検出している区画線位置を説明するための模式図である。
実施の形態1に係る補正量算出部の処理を示すフローチャートである。
実施の形態1に係る補正量算出部の点群位置変更処理を説明するための模式図である。
実施の形態1に係る補正量算出部の比較可能エリア算出処理を説明するための模式図である。
実施の形態1に係る補正量算出部の補正量算出処理を説明するための模式図である。
実施の形態2に係る道路情報補正装置の概略構成を示すブロック図である。
実施の形態2に係る補正量算出部の処理を示すフローチャートである。
実施の形態3に係る道路情報補正装置の概略構成を示すブロック図である。
実施の形態3に係る補正量算出部の処理を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱電機株式会社
換気扇
9日前
三菱電機株式会社
増幅器
今日
三菱電機株式会社
換気扇
9日前
三菱電機株式会社
換気扇
9日前
三菱電機株式会社
電子機器
10日前
三菱電機株式会社
回転電機
1か月前
三菱電機株式会社
収集装置
7日前
三菱電機株式会社
回転電機
25日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
半導体装置
15日前
三菱電機株式会社
空気調和機
2日前
三菱電機株式会社
加熱調理器
28日前
三菱電機株式会社
半導体装置
29日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
ねじ締め装置
今日
三菱電機株式会社
給湯システム
28日前
三菱電機株式会社
電力変換装置
1か月前
三菱電機株式会社
貯湯式給湯機
25日前
三菱電機株式会社
照明システム
15日前
三菱電機株式会社
空調システム
今日
三菱電機株式会社
樹脂成形用金型
今日
三菱電機株式会社
誘導加熱調理器
9日前
三菱電機株式会社
非常用照明装置
28日前
三菱電機株式会社
送電線保護装置
1か月前
三菱電機株式会社
電動機制御装置
21日前
三菱電機株式会社
全館空調システム
7日前
三菱電機株式会社
レンズモジュール
7日前
三菱電機株式会社
空気清浄システム
28日前
三菱電機株式会社
電流切替型DAC
15日前
三菱電機株式会社
ウエハテスト装置
1か月前
三菱電機株式会社
照明制御システム
22日前
三菱電機株式会社
照明制御システム
1か月前
三菱電機株式会社
換気空調システム
25日前
三菱電機株式会社
風力発電システム
25日前
三菱電機株式会社
道路情報補正装置
2日前
三菱電機株式会社
ヒートポンプ装置
3日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ