TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025144768
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024044608
出願日
2024-03-21
発明の名称
ロボット
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20250926BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】部品同士の干渉を抑制し、部品の着脱を容易に行うことのできるロボットを提供する。
【解決手段】ロボットは、基台と、前記基台に対して回動するロボットアームと、前記基台と前記ロボットアームとを接続する減速機と、前記減速機に接続されているモーターと、前記モーターの駆動を制御する制御基板と、前記制御基板に電源を供給する電源基板と、を有し、前記基台は、前記減速機、前記モーター、前記制御基板および前記電源基板の少なくとも1つが取り付けられている第1筐体と、前記減速機、前記モーター、前記制御基板および前記電源基板のうち前記第1筐体に取り付けられているものを除く少なくとも1つが取り付けられている第2筐体と、を有する。
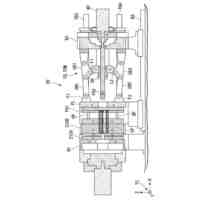
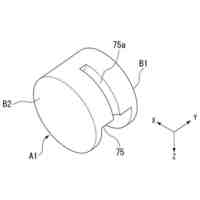
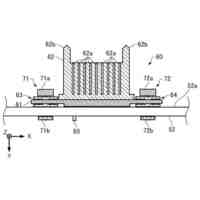
【選択図】図3
特許請求の範囲
【請求項1】
基台と、
前記基台に対して回動するロボットアームと、
前記基台と前記ロボットアームとを接続する減速機と、
前記減速機に接続されているモーターと、
前記モーターの駆動を制御する制御基板と、
前記制御基板に電源を供給する電源基板と、を有し、
前記基台は、前記減速機、前記モーター、前記制御基板および前記電源基板の少なくとも1つが取り付けられている第1筐体と、前記減速機、前記モーター、前記制御基板および前記電源基板のうち前記第1筐体に取り付けられているものを除く少なくとも1つが取り付けられている第2筐体と、を有することを特徴とするロボット。
続きを表示(約 1,300 文字)
【請求項2】
前記第1筐体には、前記制御基板および前記電源基板が取り付けられ、
前記第2筐体には、前記減速機および前記モーターが取り付けられている請求項1に記載のロボット。
【請求項3】
前記第2筐体には、さらに、前記モーターと前記減速機とを接続し、前記モーターの駆動力を前記減速機に伝達する動力伝達機構が取り付けられ、
前記動力伝達機構は、前記モーターの出力軸に接続されている第1プーリーと、前記減速機の入力側に接続されている第2プーリーと、前記第1プーリーと前記第2プーリーとに掛け回されているベルトと、を有する請求項2に記載のロボット。
【請求項4】
前記第1筐体は、前記第2筐体によって塞がれる開口部を有し、
前記開口部を介して前記減速機および前記モーターが前記第1筐体内に挿入されている請求項2に記載のロボット。
【請求項5】
前記第2筐体は、前記第1筐体に載置された状態で、前記第1筐体に固定されている請求項4に記載のロボット。
【請求項6】
前記第2筐体は、前記第1筐体内に収容され、
前記第1筐体には、前記減速機が取り付けられ、
前記第2筐体には、前記モーター、前記制御基板および前記電源基板が取り付けられている請求項1に記載のロボット。
【請求項7】
前記第2筐体は、箱状をなし、
前記制御基板および前記電源基板は、前記第2筐体の内部に収容され、
前記モーターは、前記第2筐体の外部に配置されている請求項6に記載のロボット。
【請求項8】
前記モーターと前記減速機との間に位置し、前記モーターの駆動力を前記減速機に伝達する動力伝達機構を有し、
前記動力伝達機構は、前記モーターの出力軸に接続されている第1プーリーと、前記減速機の入力側に接続されている第2プーリーと、前記第1プーリーと前記第2プーリーとに掛け回されているベルトと、を有し、
前記第1筐体に対する前記第2筐体の位置を調整することにより、前記ベルトの張力を調整することができる請求項7に記載のロボット。
【請求項9】
基台と、
前記基台に対して回動するロボットアームと、
前記基台と前記ロボットアームとを接続する減速機と、
前記減速機に接続されているモーターと、
前記モーターの駆動を制御する制御基板と、
前記制御基板に電源を供給する電源基板と、
ファンと、を有し、
前記基台は、前記減速機、前記モーター、前記制御基板、前記電源基板および前記ファンの少なくとも1つが取り付けられている第1筐体と、前記減速機、前記モーター、前記制御基板、前記電源基板および前記ファンのうち前記第1筐体に取り付けられているものを除く少なくとも1つが取り付けられている第2筐体と、を有することを特徴とするロボット。
【請求項10】
前記第1筐体には、少なくとも前記減速機および前記モーターが取り付けられ、
前記第2筐体には、少なくとも前記ファンが取り付けられている請求項9に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1に記載されたロボットは、基台と、基台に変位可能に連結されたロボットアームと、を有するロボット本体を有する。ロボットアームは、基台に回動可能に連結された第1アームと、第1アームに回動可能に連結された第2アームと、第2アームに回動可能に連結された第3アームと、第3アームに回動可能に連結された第4アームと、第4アームに回動可能に連結された第5アームと、第5アームに回動可能に連結された第6アームと、を有する。
【0003】
また、特許文献1に記載されたロボットは、基台と第1アームとを回動可能に連結する減速機と、減速機を介して第1アームを回動させるモーターと、を有し、これらが共に基台内に収容されている。さらに、基台内には、ロボット本体の駆動を制御するための制御基板、制御基板に電力を供給するための電源基板、制御基板の指令に基づいて各アームに配置されたモーターを駆動するための駆動基板と、が収容されている。
【先行技術文献】
【特許文献】
【0004】
特開2019-063933号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このように、基台内に多くの部品が収容された構成では、部品同士の干渉によって部品の着脱に手間がかかるという問題がある。
【課題を解決するための手段】
【0006】
本発明のロボットは、基台と、
前記基台に対して回動するロボットアームと、
前記基台と前記ロボットアームとを接続する減速機と、
前記減速機に接続されているモーターと、
前記モーターの駆動を制御する制御基板と、
前記制御基板に電源を供給する電源基板と、を有し、
前記基台は、前記減速機、前記モーター、前記制御基板および前記電源基板の少なくとも1つが取り付けられている第1筐体と、前記減速機、前記モーター、前記制御基板および前記電源基板のうち前記第1筐体に取り付けられているものを除く少なくとも1つが取り付けられている第2筐体と、を有する。
【0007】
本発明のロボットは、基台と、
前記基台に対して回動するロボットアームと、
前記基台と前記ロボットアームとを接続する減速機と、
前記減速機に接続されているモーターと、
前記モーターの駆動を制御する制御基板と、
前記制御基板に電源を供給する電源基板と、
ファンと、を有し、
前記基台は、前記減速機、前記モーター、前記制御基板、前記電源基板および前記ファンの少なくとも1つが取り付けられている第1筐体と、前記減速機、前記モーター、前記制御基板、前記電源基板および前記ファンのうち前記第1筐体に取り付けられているものを除く少なくとも1つが取り付けられている第2筐体と、を有する。
【図面の簡単な説明】
【0008】
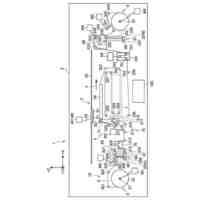
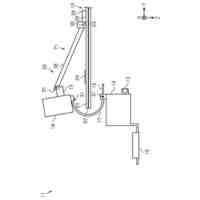
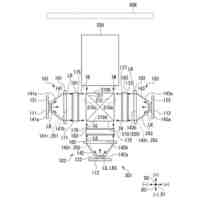
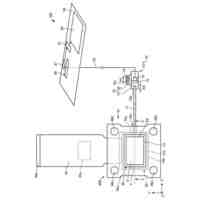
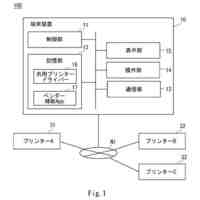
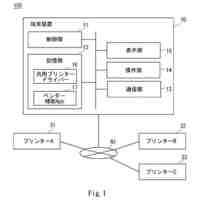
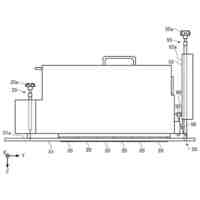
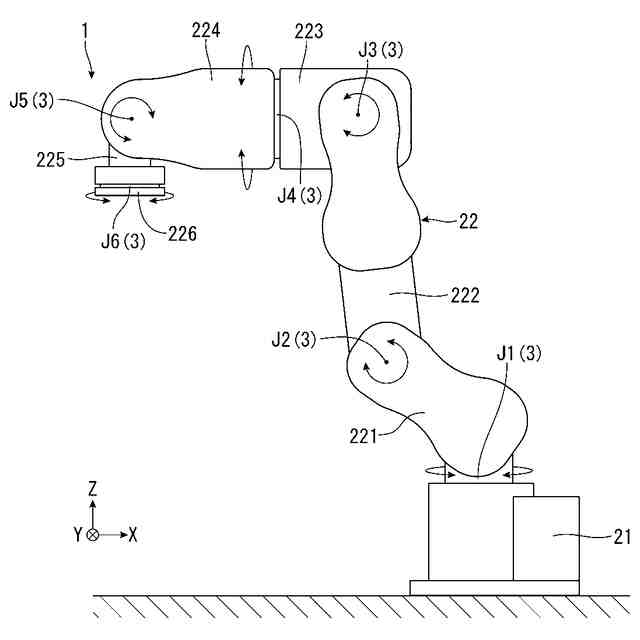
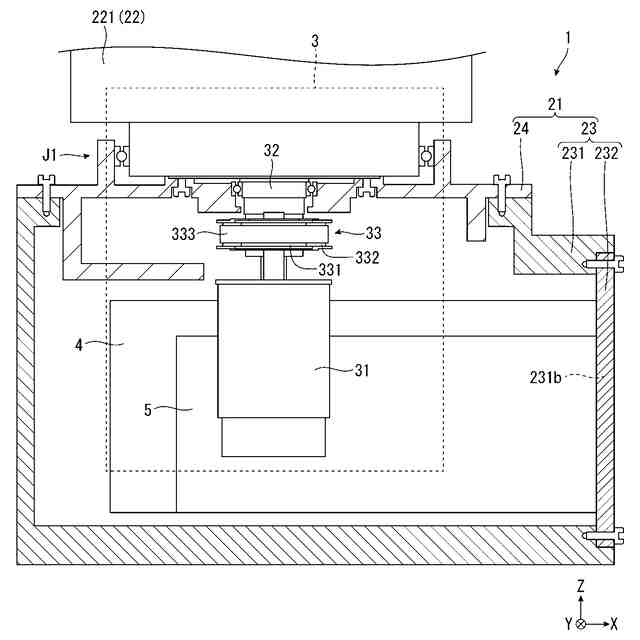
第1実施形態に係るロボットを示す側面図である。
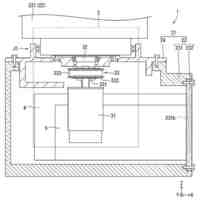
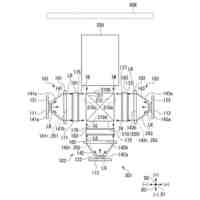
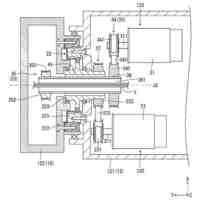
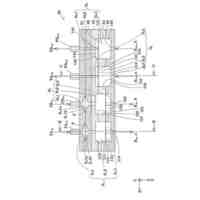
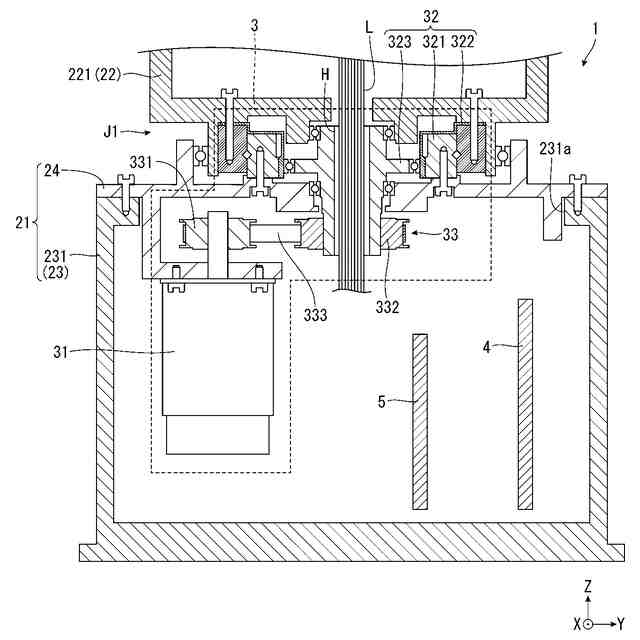
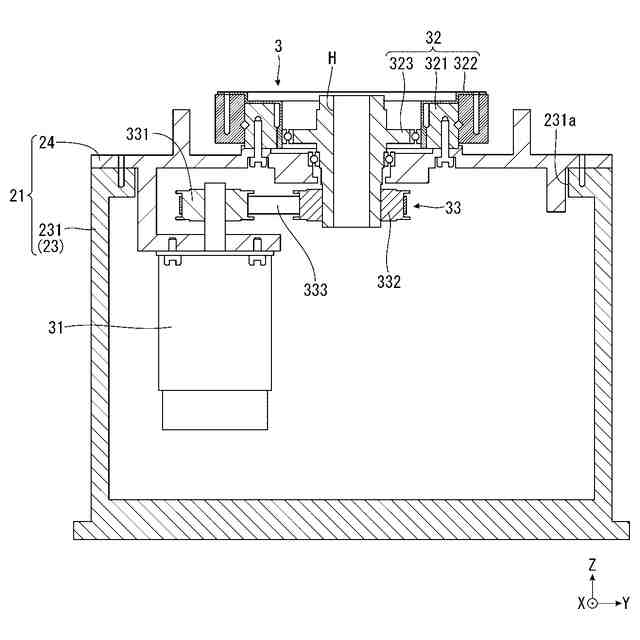
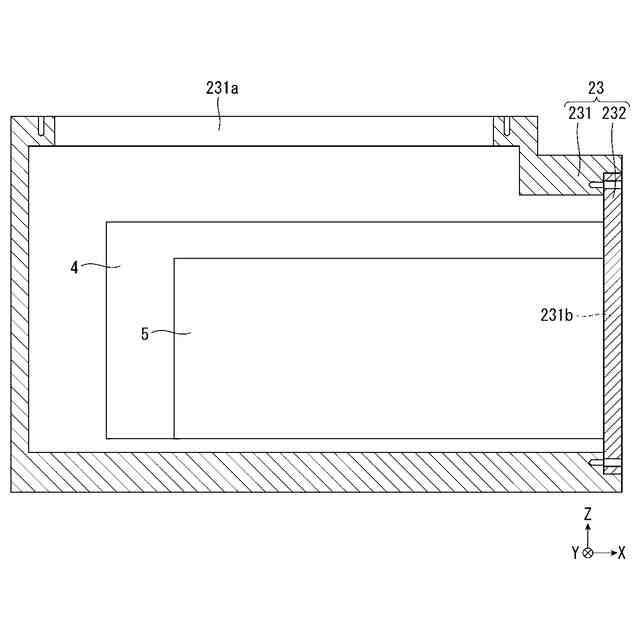
基台をX軸方向プラス側から見た断面図である。
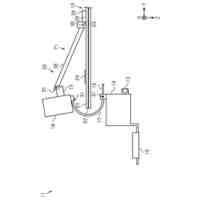
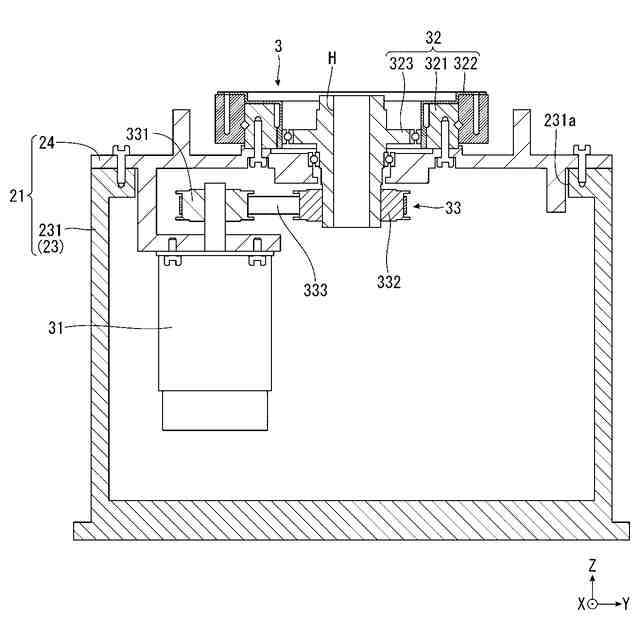
基台をY軸方向マイナス側から見た断面図である。
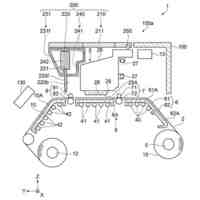
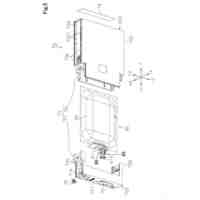
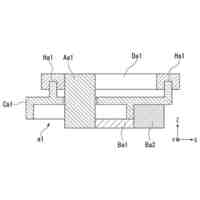
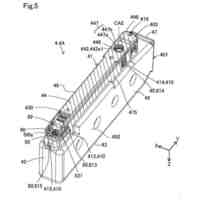
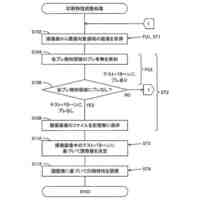
基台の組み立て手順を説明するための断面図である。
基台の組み立て手順を説明するための断面図である。
基台の組み立て手順を説明するための断面図である。
基台の組み立て手順を説明するための断面図である。
基台の組み立て手順を説明するための断面図である。
基台の組み立て手順を説明するための断面図である。
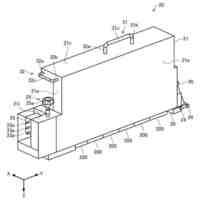
基台の変形例を示す断面図である。
基台の変形例を示す断面図である。
基台の変形例を示す断面図である。
基台の変形例を示す断面図である。
第2実施形態に係るロボットが備える基台の断面図である。
基台の組み立て手順を説明するための断面図である。
基台の組み立て手順を説明するための断面図である。
基台の組み立て手順を説明するための断面図である。
第3実施形態に係るロボットが備える基台の断面図である。
【発明を実施するための形態】
【0009】
以下、本発明のロボットを添付図面に示す実施形態に基づいて詳細に説明する。
【0010】
<第1実施形態>
図1は、第1実施形態に係るロボットを示す側面図である。図2は、基台をX軸方向プラス側から見た断面図である。図3は、基台をY軸方向マイナス側から見た断面図である。図4ないし図9は、それぞれ、基台の組み立て手順を説明するための断面図である。図10ないし図13は、それぞれ、基台の変形例を示す断面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セイコーエプソン株式会社
印刷装置
2日前
セイコーエプソン株式会社
ロボット
2日前
セイコーエプソン株式会社
印刷装置
2日前
セイコーエプソン株式会社
印刷装置
2日前
セイコーエプソン株式会社
印刷装置
2日前
セイコーエプソン株式会社
液体収容容器
2日前
セイコーエプソン株式会社
プロジェクター
2日前
セイコーエプソン株式会社
プロジェクター
2日前
セイコーエプソン株式会社
プロジェクター
2日前
セイコーエプソン株式会社
垂直多関節ロボット
2日前
セイコーエプソン株式会社
回路装置及び電子機器
2日前
セイコーエプソン株式会社
偏心揺動装置及び射出成形装置
2日前
セイコーエプソン株式会社
ヘッドユニット及び液体吐出装置
2日前
セイコーエプソン株式会社
液体噴射ヘッド及び液体噴射装置
2日前
セイコーエプソン株式会社
液体容器、印刷装置、印刷システム
2日前
セイコーエプソン株式会社
液体吐出装置、及びヘッドユニット
2日前
セイコーエプソン株式会社
表示装置および表示装置の制御方法
2日前
セイコーエプソン株式会社
射出成形システム、及び成形品押出方法
2日前
セイコーエプソン株式会社
分光装置、分光装置の校正方法および分光方法
2日前
セイコーエプソン株式会社
軟磁性粉末、圧粉磁心、磁性素子および電子機器
2日前
セイコーエプソン株式会社
情報処理方法、サーバー装置、及び情報処理装置
2日前
セイコーエプソン株式会社
流量調節装置、三次元造形装置および射出成形装置
2日前
セイコーエプソン株式会社
印刷システム、プログラム、及び、印刷特性調整方法
2日前
セイコーエプソン株式会社
印刷制御プログラム、印刷システム、及び印刷物生産方法
2日前
セイコーエプソン株式会社
印刷制御プログラム、印刷システム、及び印刷物生産方法
2日前
セイコーエプソン株式会社
容量性負荷駆動回路、液体吐出装置、及びヘッドユニット
2日前
セイコーエプソン株式会社
液体吐出装置、ヘッドユニット及びヘッドユニット接続方法
2日前
セイコーエプソン株式会社
液体吐出装置、ヘッドユニット及びヘッドユニット接続方法
2日前
セイコーエプソン株式会社
絶縁物被覆軟磁性粉末、圧粉磁心、磁性素子および電子機器
2日前
セイコーエプソン株式会社
画像形成システム、画像形成システムの制御方法、及び、画像形成装置
2日前
セイコーエプソン株式会社
画像形成装置、ソフトウェア更新方法、及びソフトウェア更新システム
2日前
個人
固定補助具
1か月前
個人
折りたたみ工具
27日前
株式会社三協システム
製函機
25日前
川崎重工業株式会社
ロボット
4日前
株式会社竹中工務店
補助セット
3日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ