TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025150035
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024050691
出願日
2024-03-27
発明の名称
システム、ユニット、及び製造方法
出願人
株式会社安川電機
代理人
弁理士法人RYUKA国際特許事務所
主分類
B25J
19/06 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
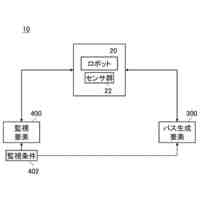
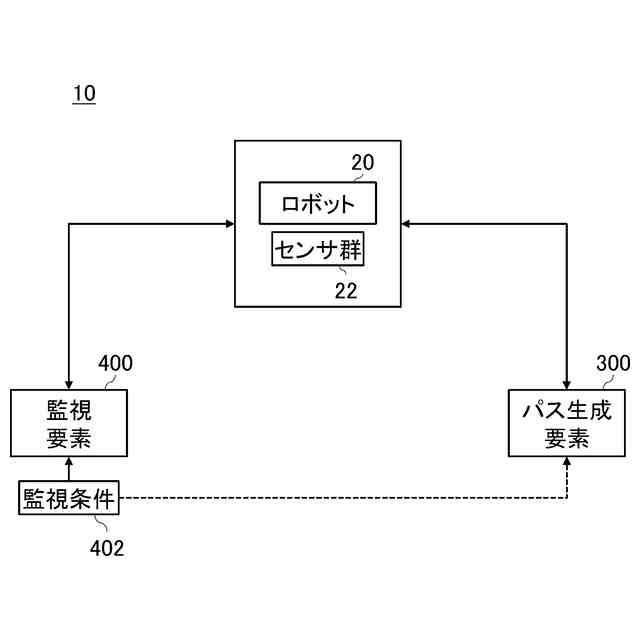
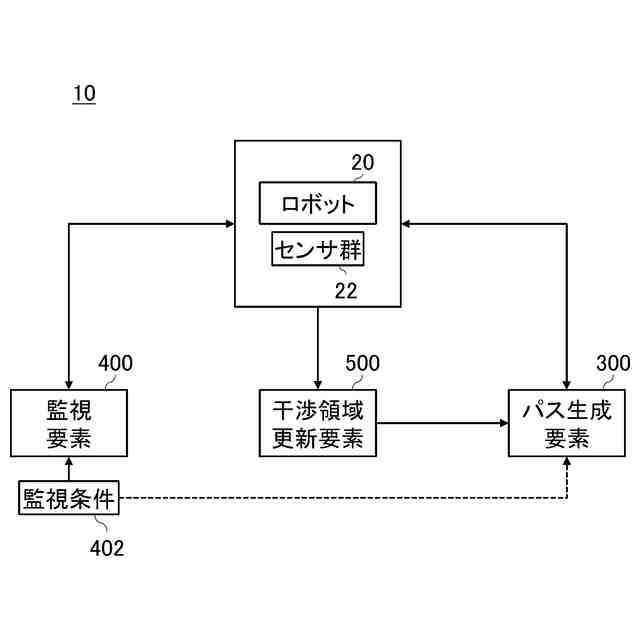
【解決手段】監視条件に基づいてロボットをランタイムで監視する監視要素と、前記監視要素が使用する前記監視条件を用いて、前記ロボットの動作パスを生成するパス生成要素とを備えるシステムを提供する。前記パス生成要素は、前記ロボット周辺の干渉領域の情報を有してよく、前記干渉領域に加えて、前記監視条件を用いて前記動作パスを生成してよい。前記システムは、センサによるリアルタイムなセンシング情報に基づいて、前記干渉領域の情報を更新する干渉領域更新要素を更に備えてよく、前記パス生成要素は、更新された前記干渉領域の情報と、前記監視条件とを用いて前記動作パスを生成してよい。
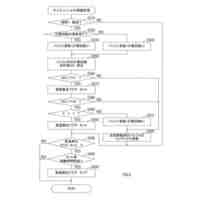
【選択図】図1
特許請求の範囲
【請求項1】
監視条件に基づいてロボットをランタイムで監視する監視要素と、
前記監視要素が使用する前記監視条件を用いて、前記ロボットの動作パスを生成するパス生成要素と
を備えるシステム。
続きを表示(約 1,300 文字)
【請求項2】
前記パス生成要素は、
前記ロボット周辺の干渉領域の情報を有し、
前記干渉領域に加えて、前記監視条件を用いて前記動作パスを生成する、請求項1に記載のシステム。
【請求項3】
センサによるリアルタイムなセンシング情報に基づいて、前記干渉領域の情報を更新する干渉領域更新要素を更に備え、
前記パス生成要素は、更新された前記干渉領域の情報と、前記監視条件とを用いて前記動作パスを生成する、請求項2に記載のシステム。
【請求項4】
前記監視条件は、前記ロボットの干渉領域の情報を含み、
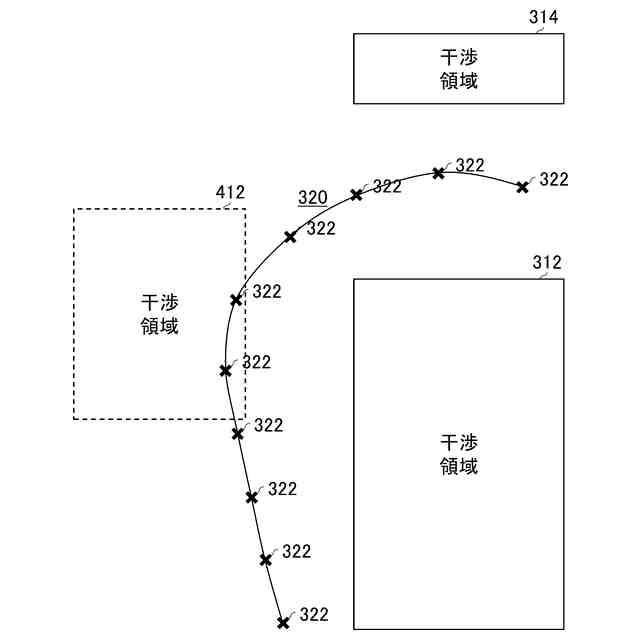
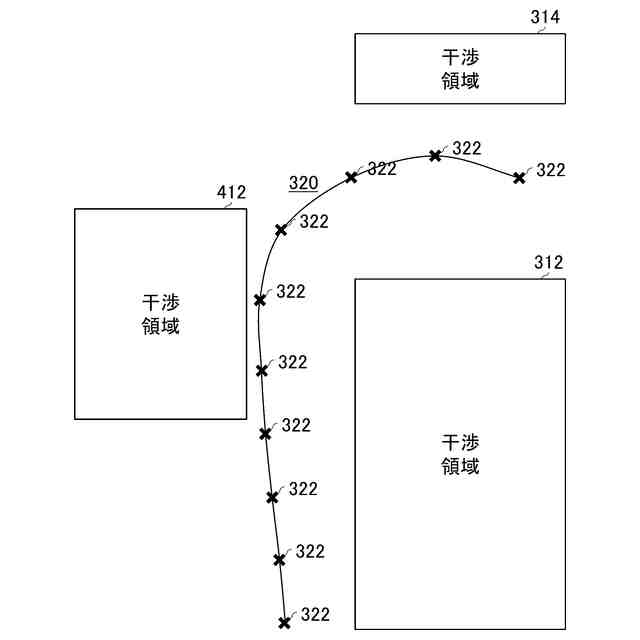
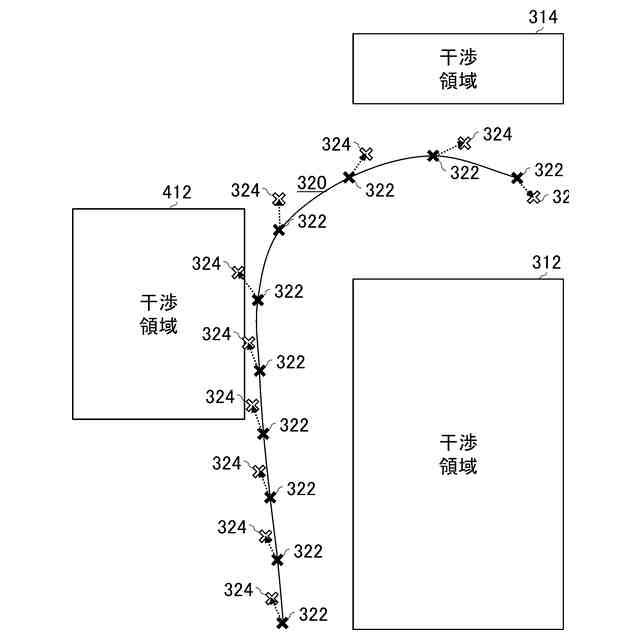
前記パス生成要素は、前記ロボットが前記パス生成要素が有する前記干渉領域の情報が示す前記干渉領域に干渉せず、かつ、前記ロボットが前記監視条件に含まれる前記干渉領域の情報が示す前記干渉領域に干渉しないように前記動作パスを生成する、請求項2に記載のシステム。
【請求項5】
前記監視条件は、前記ロボットの動作中に前記ロボットのモータへの電源供給が遮断されたときの前記ロボットの惰走量に関する惰走量情報を含み、
前記監視要素は、前記ロボットに関する値及び前記惰走量情報に基づいて、前記ロボットの将来のタイミングにおいて前記ロボットのモータへの電源供給が遮断されたときに前記ロボットが惰走することによって到達する位置を予測して、予測した位置が前記監視条件に含まれる前記干渉領域の情報が示す前記干渉領域に含まれる場合に、前記ロボットのモータへの電源供給を遮断する安全機能を有し、
前記パス生成要素は、前記動作パスの各タイミングにおいて、前記ロボットのモータへの電源供給が遮断されたときに前記ロボットが惰走することによって到達する位置が、前記監視条件に含まれる前記干渉領域の情報が示す前記干渉領域に含まれないように、前記動作パスを生成する、請求項4に記載のシステム。
【請求項6】
前記監視要素は、複数の監視条件を切り替えて用いる機能を有し、
前記パス生成要素は、前記複数の監視条件のうち、前記動作パスを生成するときに前記監視要素が用いている前記監視条件を用いて、前記動作パスを生成する、請求項1から5のいずれか一項に記載のシステム。
【請求項7】
前記監視要素は、センサによるセンシング情報に基づいて、前記複数の監視条件を切り替えて用いる、請求項6に記載のシステム。
【請求項8】
前記監視要素を有する第1ユニットと、
前記パス生成要素を有する第2ユニットと
を備える、請求項1から5のいずれか一項に記載のシステム。
【請求項9】
前記ロボットを更に備える、請求項8に記載のシステム。
【請求項10】
監視条件に基づいてロボットをランタイムで監視する機能を有する監視要素が用いる前記監視条件を取得する監視条件取得要素と、
前記監視条件を用いて前記ロボットの動作パスを生成するパス生成要素と
を備えるユニット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、システム、ユニット、及び製造方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1には、ロボットと作業環境の幾何学的形状およびそれらの配置を記述した計算機上の幾何モデル手段と、モデル同士の干渉を検査する計算機上の干渉検査手段を利用し、ロボットのスタートおよびゴール配置が与えられたとき、ロボットと作業環境内の障害物とが干渉しないロボットの動作経路を計画する方法が記載されている。
[先行技術文献]
[特許文献]
[特許文献1]特開2000-020117号公報
【発明の概要】
【0003】
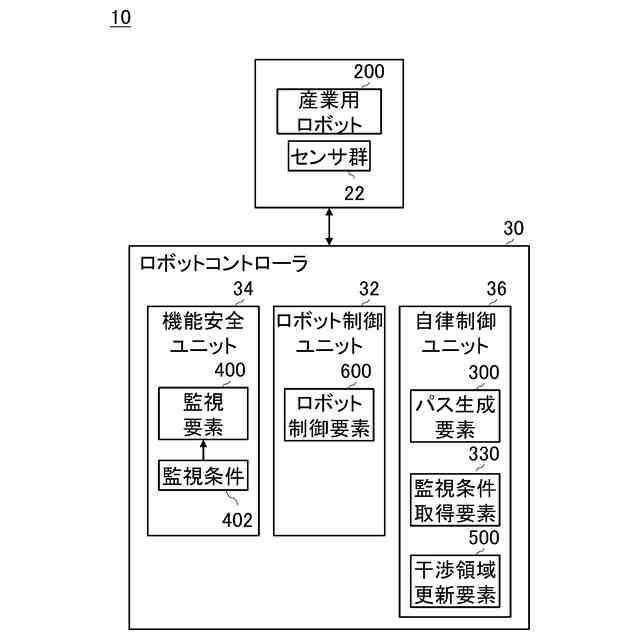
本発明の一実施態様によれば、システムが提供される。前記システムは、監視要素を備えてよい。前記監視要素は、監視条件に基づいてロボットをランタイムで監視してよい。前記システムは、パス生成要素を備えてよい。前記パス生成要素は、前記監視要素が使用する前記監視条件を用いて、前記ロボットの動作パスを生成してよい。
【0004】
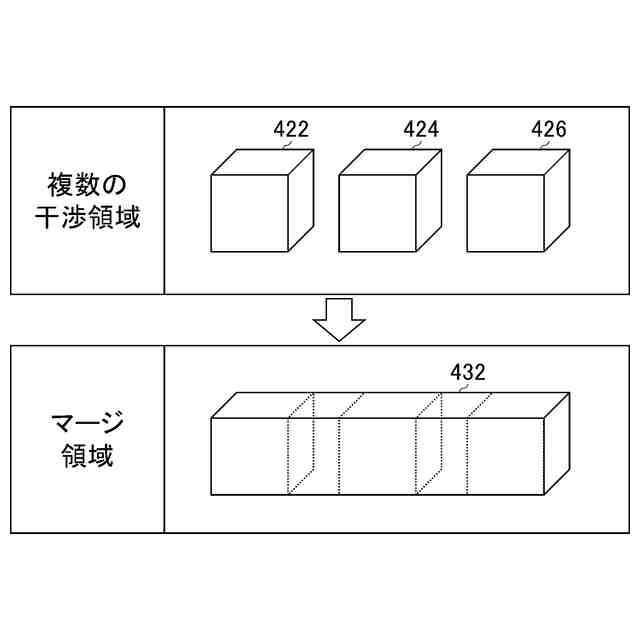
前記システムにおいて、前記パス生成要素は、前記ロボット周辺の干渉領域の情報を有してよく、前記干渉領域に加えて、前記監視条件を用いて前記動作パスを生成してよい。前記システムは、センサによるリアルタイムなセンシング情報に基づいて、前記干渉領域の情報を更新する干渉領域更新要素を更に備えてよい。前記パス生成要素は、更新された前記干渉領域の情報と、前記監視条件とを用いて前記動作パスを生成してよい。
【0005】
前記いずれかのシステムにおいて、前記監視条件は、前記ロボットの干渉領域の情報を含んでよい。前記パス生成要素は、前記ロボットが前記パス生成要素が有する前記干渉領域の情報が示す前記干渉領域に干渉せず、かつ、前記ロボットが前記監視条件に含まれる前記干渉領域の情報が示す前記干渉領域に干渉しないように前記動作パスを生成してよい。前記監視条件は、前記ロボットの動作中に前記ロボットのモータへの電源供給が遮断されたときの前記ロボットの惰走量に関する惰走量情報を含んでよい。前記監視要素は、前記ロボットに関する値及び前記惰走量情報に基づいて、前記ロボットの将来のタイミングにおいて前記ロボットのモータへの電源供給が遮断されたときに前記ロボットが惰走することによって到達する位置を予測して、予測した位置が前記監視条件に含まれる前記干渉領域の情報が示す前記干渉領域に含まれる場合に、前記ロボットのモータへの電源供給を遮断する安全機能を有してよい。前記パス生成要素は、前記動作パスの各タイミングにおいて、前記ロボットのモータへの電源供給が遮断されたときに前記ロボットが惰走することによって到達する位置が、前記監視条件に含まれる前記干渉領域の情報が示す前記干渉領域に含まれないように、前記動作パスを生成してよい。
【0006】
前記いずれかのシステムにおいて、前記監視要素は、複数の監視条件を切り替えて用いる機能を有してよい。前記パス生成要素は、前記複数の監視条件のうち、前記動作パスを生成するときに前記監視要素が用いている前記監視条件を用いて、前記動作パスを生成してよい。前記監視要素は、センサによるセンシング情報に基づいて、前記複数の監視条件を切り替えて用いてよい。
【0007】
前記いずれかのシステムは、前記監視要素を有する第1ユニットと、前記パス生成要素を有する第2ユニットとを備えてよい。前記システムは、前記ロボットを更に備えてよい。
【0008】
本発明の一実施態様によれば、ユニットが提供される。前記ユニットは、監視条件取得要素を備えてよい。前記監視条件取得要素は、監視条件に基づいてロボットをランタイムで監視する機能を有する監視要素が用いる前記監視条件を取得してよい。前記ユニットは、パス生成要素を備えてよい。前記パス生成要素は、前記監視条件を用いて前記ロボットの動作パスを生成してよい。
【0009】
本発明の一実施態様によれば、システムが提供される。前記システムは、監視要素を備えてよい。前記監視要素は、ロボットが監視条件を満たしていることを監視し、前記ロボットが前記監視条件を満たさないと予測された場合に、前記ロボットのモータへの電源供給を遮断する安全機能を有してよい。前記システムは、軌道制御実行要素を備えてよい。前記軌道制御実行要素は、前記監視条件を用いて、前記ロボットの軌道制御を実行してよい。前記システムにおいて、前記監視条件は、前記ロボットの干渉領域の情報と、前記ロボットの動作中に前記ロボットのモータへの電源供給が遮断されたときの前記ロボットの惰走量に関する惰走量情報とを含んでよい。前記監視要素は、前記ロボットに関する値及び前記惰走量情報に基づいて、前記ロボットの将来のタイミングにおいて前記ロボットのモータへの電源供給が遮断されたときに前記ロボットが惰走することによって到達する位置を予測して、予測した位置が前記干渉領域に含まれる場合に、前記ロボットのモータへの電源供給を遮断する前記安全機能を有してよい。前記軌道制御実行要素は、前記干渉領域の情報及び前記惰走量情報を用いて、前記ロボットの軌道制御を実行してよい。
【0010】
本発明の一実施態様によれば、ロボットによって被製造物を製造する製造方法が提供される。前記製造方法は、監視条件に基づいて前記ロボットをランタイムで監視する監視要素が用いる前記監視条件を、パス生成要素が取得する監視条件取得段階を備えてよい。前記製造方法は、前記パス生成要素が、前記監視条件を用いて前記ロボットの動作パスを生成するパス生成段階を備えてよい。前記製造方法は、前記監視要素が、前記監視条件に基づく前記ロボットの監視を開始する監視開始段階を備えてよい。前記製造方法は、前記パス生成段階において生成された前記動作パスに基づいて前記ロボットを制御する制御段階を備えてよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社安川電機
ロボット
5日前
株式会社安川電機
モータ及び駆動システム
26日前
株式会社安川電機
エンコーダ及びエンコーダシステム
19日前
株式会社安川電機
システム、ユニット、及び製造方法
26日前
個人
フラワーホッチキス。
21日前
川崎重工業株式会社
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
株式会社三協システム
移載装置
1か月前
株式会社不二越
ロボット
1か月前
川崎重工業株式会社
ハンド
25日前
株式会社マキタ
ハンマドリル
8日前
株式会社マキタ
ハンマドリル
8日前
工機ホールディングス株式会社
作業機
25日前
トヨタ自動車株式会社
ロボット
28日前
株式会社不二越
移動ロボットシステム
1か月前
川崎重工業株式会社
塗装システム
25日前
株式会社不二越
ロボットシステム
1か月前
本田技研工業株式会社
装置
1か月前
株式会社安川電機
ロボット
5日前
株式会社不二越
エッジ仕上げ装置
1か月前
株式会社不二越
垂直多関節ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
28日前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
ライオン株式会社
移載システム
1か月前
アネックスツール株式会社
ドライバービット
1か月前
工機ホールディングス株式会社
作業機
25日前
トヨタ自動車株式会社
ロボットハンド
5日前
株式会社不二越
ロボットに用いる伝送路
18日前
川崎重工業株式会社
ワーク搬送ロボット
25日前
株式会社マキタ
回転打撃工具
28日前
ワールド技研株式会社
ロボットセル装置
1か月前
株式会社マキタ
現場用作業機
14日前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
1か月前
セイコーエプソン株式会社
ロボット
1か月前
NTN株式会社
ハンド
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ