TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025134291
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032111
出願日
2024-03-04
発明の名称
移載システム
出願人
ライオン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250909BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】移載時間、移載コストおよび設置スペースを低減できる移載システムを提供する。
【解決手段】荷物を吸着可能な吸着部を有するハンド部と、ハンド部を複数軸で駆動するロボット部と、ハンド部に設けられ、荷物の有無に関する情報を検知する1つ以上の検知部と、積み付けられた段毎の個数、配置および吸着高さを含む荷物に関する位置情報を記憶する記憶部と、検知部が検知した荷物の有無に関する情報を演算処理して荷物の有無を検知する演算部と、位置情報および演算部の演算処理結果に基づいて、吸着部およびロボット部の駆動を制御する制御部と、を備える。
【選択図】図7
特許請求の範囲
【請求項1】
荷物を吸着可能な吸着部を有するハンド部と、
前記ハンド部を複数軸で駆動するロボット部と、
前記ハンド部に設けられ、前記荷物の有無に関する情報を検知する1つ以上の検知部と、
積み付けられた段毎の個数、配置および吸着高さを含む前記荷物に関する位置情報を記憶する記憶部と、
前記検知部が検知した前記荷物の有無に関する情報を演算処理して前記荷物の有無を検知する演算部と、
前記位置情報および前記演算部の演算処理結果に基づいて、前記吸着部および前記ロボット部の駆動を制御する制御部と、
を備えることを特徴とする移載システム。
続きを表示(約 680 文字)
【請求項2】
前記検知部は、前記荷物の有無に関する情報として、照射した光の前記荷物からの反射光の光量を検知する、
請求項1に記載の移載システム。
【請求項3】
前記光の上下方向に対する照射角度を調整可能な角度調整部を有する、
請求項2に記載の移載システム。
【請求項4】
前記制御部は、前記反射光の受光結果に基づいて前記ハンド部の向きおよび高さを調整可能である、
請求項2に記載の移載システム。
【請求項5】
前記制御部は、前記反射光の受光結果を演算した結果と前記位置情報とを用いて学習し、前記吸着部および前記ロボット部の駆動をフィードバック制御する、
請求項4に記載の移載システム。
【請求項6】
前記ハンド部に加速度センサと、歪センサと、温度センサと、帯電センサの少なくとも一つが設けられている、
請求項2に記載の移載システム。
【請求項7】
前記制御部は、前記反射光の受光結果を演算した結果と、前記加速度センサ、前記歪センサ、前記温度センサおよび前記帯電センサの少なくとも一つの検知結果を演算した結果と、前記位置情報とを用いて学習し、前記吸着部および前記ロボット部の駆動をフィードバック制御する、
請求項6に記載の移載システム。
【請求項8】
前記検知部は、間隔をあけて複数配置され、
前記間隔を調整可能な間隔調整部を有する、
請求項1から7のいずれか一項に記載の移載システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移載システムに関するものである。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
パレットの上に積み付けられた荷物を移載する移載システムとして、例えば、特許文献1が開示されている。特許文献1に開示された移載システムは、カメラがパレットに載置された複数の荷物を撮影し、コントローラがカメラからの画像信号に基づいて、荷物の位置、形状、大きさ等を判断する。コントローラは、判断した荷物の情報に基づいてロボットアーム、ハンドおよび吸着装置を駆動させ、吸着装置が吸着した荷物を移載テーブルに移載する。
【先行技術文献】
【特許文献】
【0003】
特開2021-94663号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
カメラの画像処理時間は長いため、荷物の移載時間(タクト)が増加するという問題がある。カメラおよび照明等の付帯装置は高価であり移載コストが増加するとともに、設置スペースが増加するという問題が生じる。
【0005】
本発明は、以上のような点を考慮してなされたもので、移載時間、移載コストおよび設置スペースを低減できる移載システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は下記の態様を有する。
[1]
荷物を吸着可能な吸着部を有するハンド部と、前記ハンド部を複数軸で駆動するロボット部と、前記ハンド部に設けられ、前記荷物の有無に関する情報を検知する1つ以上の検知部と、積み付けられた段毎の個数、配置および吸着高さを含む前記荷物に関する位置情報を記憶する記憶部と、前記検知部が検知した前記荷物の有無に関する情報を演算処理して前記荷物の有無を検知する演算部と、前記位置情報および前記演算部の演算処理結果に基づいて、前記吸着部および前記ロボット部の駆動を制御する制御部と、を備えることを特徴とする移載システム。
[2]
前記検知部は、前記荷物の有無に関する情報として、照射した光の前記荷物からの反射光の光量を検知する、前記[1]に記載の移載システム。
[3]
前記光の上下方向に対する照射角度を調整可能な角度調整部を有する、前記[2]に記載の移載システム。
[4]
前記制御部は、前記反射光の受光結果に基づいて前記ハンド部の向きおよび高さを調整可能である、
前記[2]または前記[3]に記載の移載システム。
[5]
前記制御部は、前記反射光の受光結果を演算した結果と前記位置情報とを用いて学習し、前記吸着部および前記ロボット部の駆動をフィードバック制御する、前記[4]に記載の移載システム。
[6]
前記ハンド部に加速度センサと、歪センサと、温度センサと、帯電センサの少なくとも一つが設けられている、前記[2]から前記[5]のいずれか一項に記載の移載システム。
[7]
前記制御部は、前記反射光の受光結果を演算した結果と、前記加速度センサ、前記歪センサ、前記温度センサおよび前記帯電センサの少なくとも一つの検知結果を演算した結果と、前記位置情報とを用いて学習し、前記吸着部および前記ロボット部の駆動をフィードバック制御する、前記[6]に記載の移載システム。
[8]
前記検知部は、間隔をあけて複数配置され、前記間隔を調整可能な間隔調整部を有する、前記[1]から前記[7]のいずれか一項に記載の移載システム。
【発明の効果】
【0007】
本発明では、移載時間、移載コストおよび設置スペースを低減できる移載システムを提供することができる。
【図面の簡単な説明】
【0008】
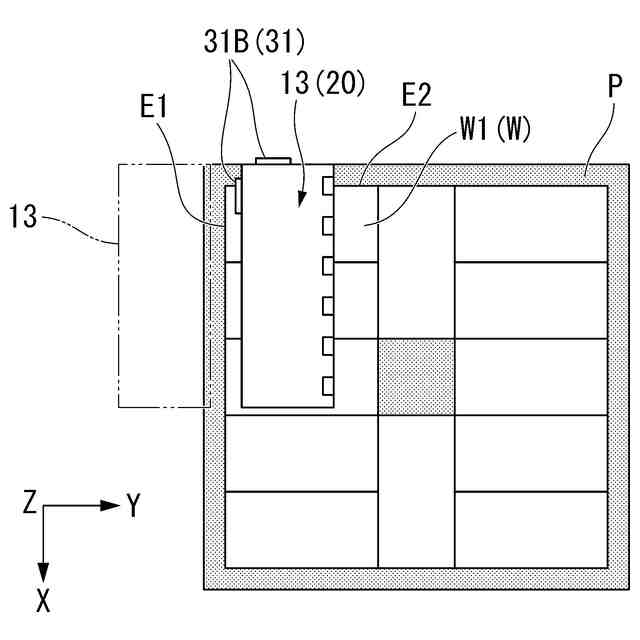
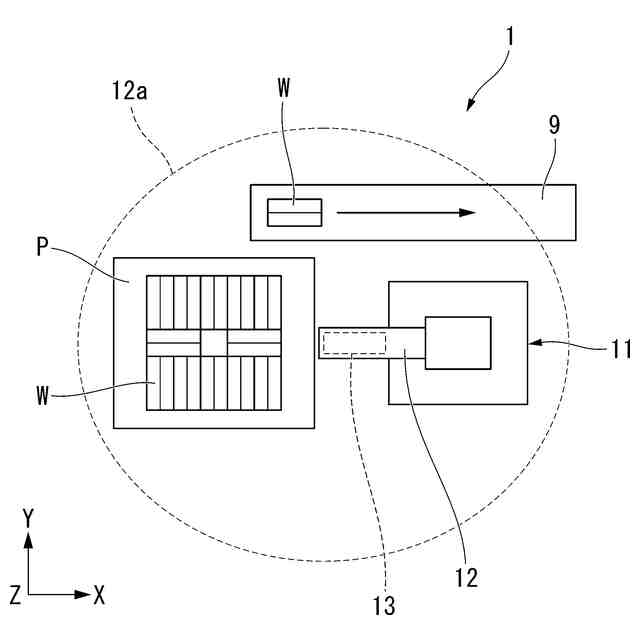
本発明の実施の形態を示す図であって、移載システムの概略的な平面図である。
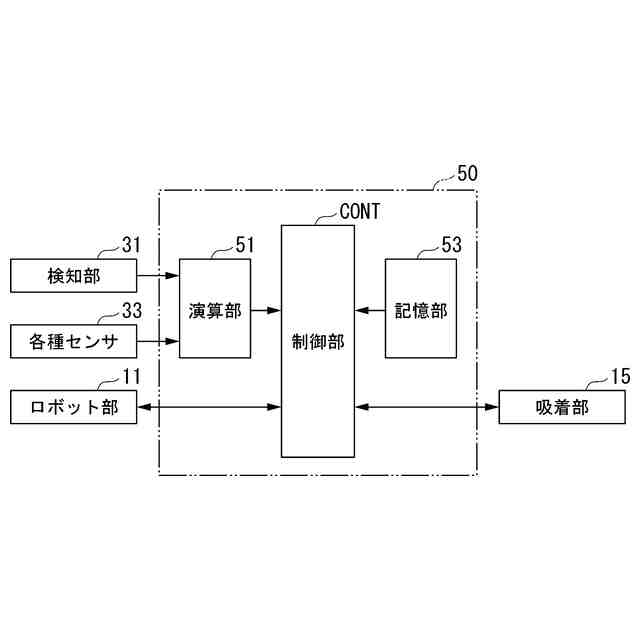
移載システムに係る制御ブロック図である。
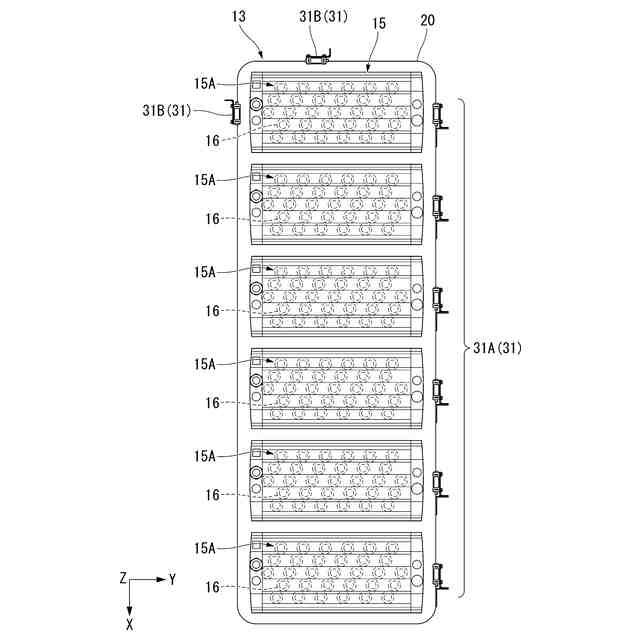
ハンド部を+Z側から見た平面図である。
ハンド部を+Y側から見た側面図である。
第1検知部を+Y側から見た図である。
パレット上に積み付けられた荷物の一例を示す斜視図である。
パレット上に積み付けられた荷物を移載する動作を示す平面図である。
パレット上に積み付けられた荷物を移載する動作を示す平面図である。
パレット上に積み付けられた荷物を移載する動作を示す平面図である。
パレット上に積み付けられた荷物を移載する動作を示す平面図である。
パレット上に積み付けられた荷物を移載する動作を示す平面図である。
パレット上に積み付けられた荷物を移載する動作を示す平面図である。
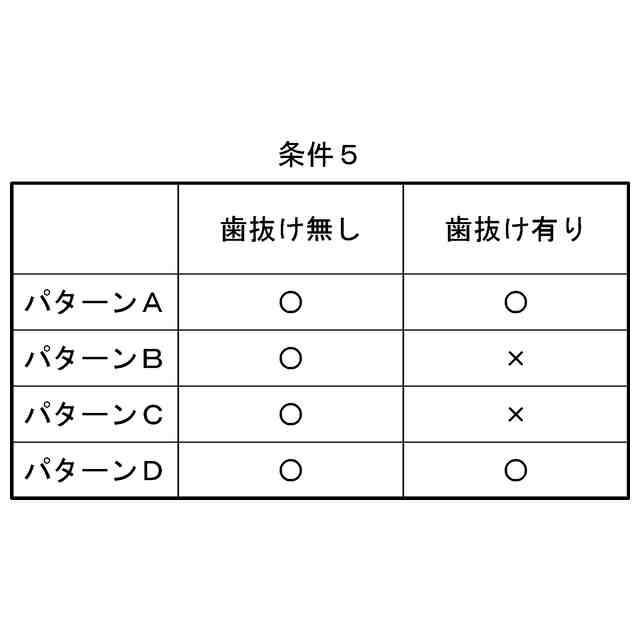
検知確認における荷物の配置パターンを示す平面図である。
検知確認における荷物の配置パターンを示す平面図である。
検知確認における荷物の配置パターンを示す平面図である。
【発明を実施するための形態】
【0009】
以下、本発明の移載システムの実施の形態を、図1から図15を参照して説明する。
なお、以下の実施形態は、本発明の一態様を示すものであり、この発明を限定するものではなく、本発明の技術的思想の範囲内で任意に変更可能である。また、以下の図面においては、各構成をわかりやすくするために、実際の構造と各構造における縮尺や数等を異ならせている。
【0010】
図1は、移載システム1の概略的な平面図である。図2は、移載システム1に係る制御ブロック図である。
図1に示すように、移載システム1は、パレットP上に積み付けられた荷物Wを搬送コンベア9に移載する。荷物Wは、特に限定されないが、例えば、直方体形状の段ボールである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ライオン株式会社
移載システム
11日前
ライオン株式会社
硬質表面用液体洗浄剤、及び硬質表面用液体洗浄剤製品
17日前
個人
固定補助具
1か月前
個人
折りたたみ工具
20日前
株式会社ジャノメ
ロボット
2か月前
株式会社三協システム
製函機
18日前
CKD株式会社
把持装置
19日前
株式会社三協システム
移載装置
17日前
住友重機械工業株式会社
教示装置
2か月前
株式会社不二越
ロボット操作装置
25日前
株式会社不二越
ロボットシステム
1か月前
株式会社ダイヘン
搬送装置
2か月前
個人
ペグハンマおよびペグハンマ用部品
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社ミクロブ
把持装置
19日前
SMC株式会社
着脱装置
18日前
日本精工株式会社
締結用工具
1か月前
太陽パーツ株式会社
アシストスーツ
20日前
工機ホールディングス株式会社
作業機
2か月前
ARMA株式会社
ジョイントフレーム
1か月前
トヨタ自動車株式会社
カプラ接続治具
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社不二越
ロボットシステム
20日前
株式会社不二越
ロボットシステム
17日前
本田技研工業株式会社
装置
2日前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
株式会社不二越
エッジ仕上げ装置
9日前
株式会社不二越
垂直多関節ロボット
10日前
株式会社マキタ
電気機器
2か月前
トヨタ自動車株式会社
歩行ロボット
23日前
積水ハウス株式会社
フィルム除去具
1か月前
株式会社不二越
協働ロボットシステム
1か月前
ダイハツ工業株式会社
移載治具
1か月前
株式会社リコー
多関節ロボット
2か月前
大和ハウス工業株式会社
ねじ回転工具
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ

































