TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025076538
公報種別
公開特許公報(A)
公開日
2025-05-16
出願番号
2023188083
出願日
2023-11-02
発明の名称
加工装置
出願人
株式会社ディスコ
代理人
インフォート弁理士法人
主分類
H01L
21/677 20060101AFI20250509BHJP(基本的電気素子)
要約
【課題】ウェーハを破損させることを防止できる加工装置を提供すること。
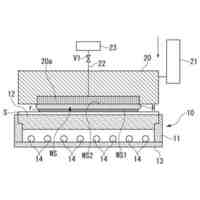
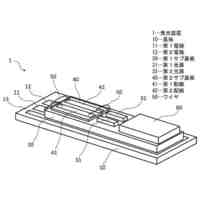
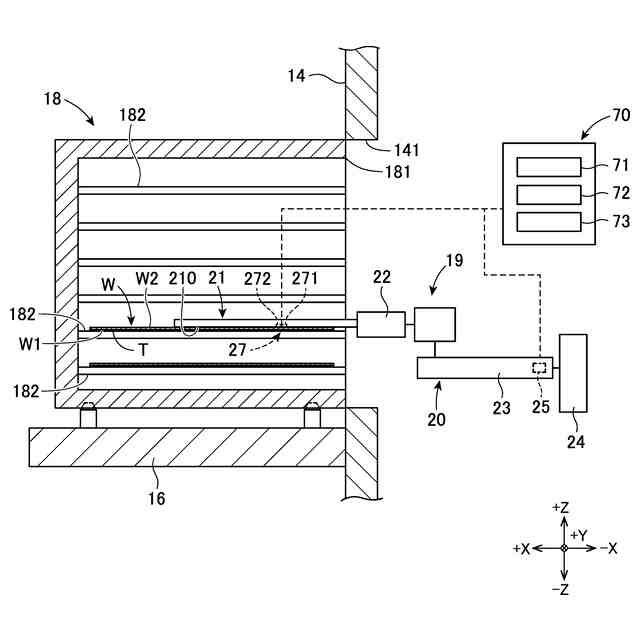
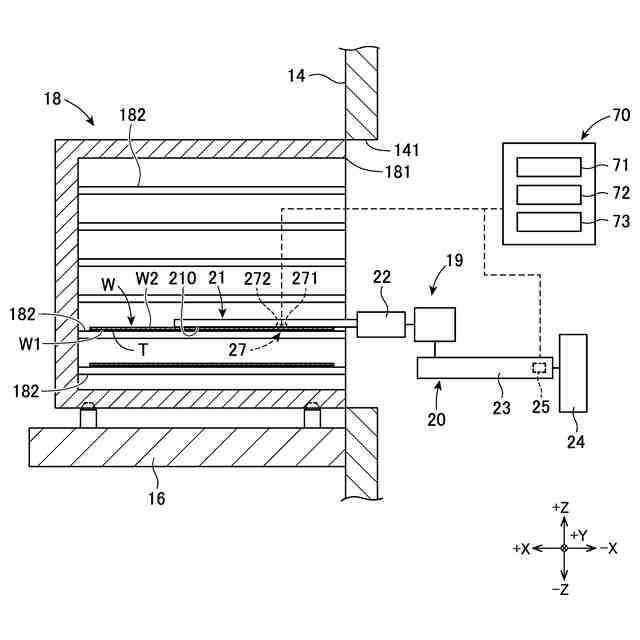
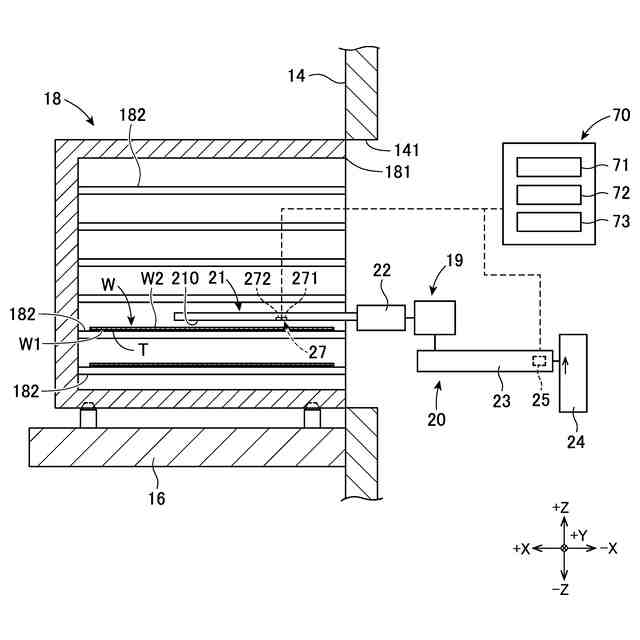
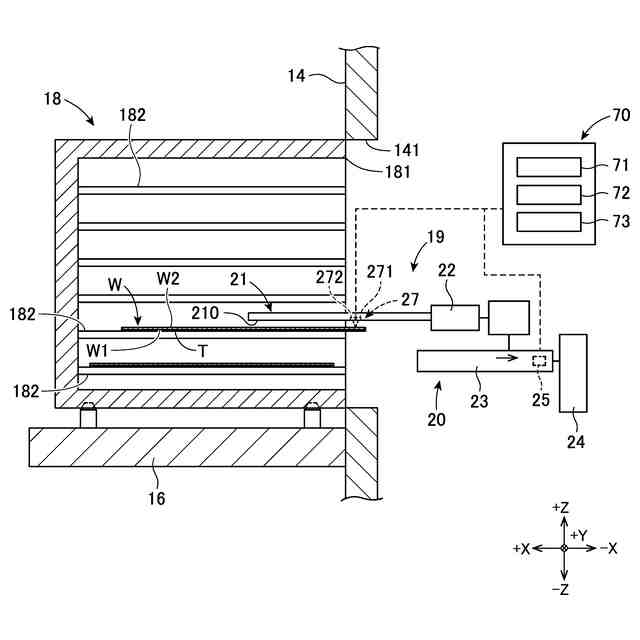
【解決手段】研削装置(1)は、ウェーハ(W)を収納する複数の棚(182)を有する第2カセット(18)を載置する第2カセットステージ(16)と、ウェーハを加工する研削機構(60)と、第2カセットに対してウェーハを搬入出するロボット(19)とを備えている。ロボットは、ウェーハを保持するロボットハンド(21)と、ロボットハンドが保持したウェーハを検知するセンサ(27)と、ロボットハンドを水平方向に移動させる水平移動機構(23)と、ロボットハンドを鉛直方向に移動させる鉛直移動機構(24)とを備えている。予め設定したロボットハンドの水平方向位置におけるセンサの検知結果によって、カセットからウェーハが飛び出しているか否かを判断する判断部(73)を更に備えている。
【選択図】図2
特許請求の範囲
【請求項1】
ウェーハを収納する複数の棚を有するカセットを載置するカセットステージと、ウェーハを保持するチャックテーブルと、ウェーハを加工する加工ユニットと、該カセットステージに載置した該カセットに対してウェーハを搬入および搬出するロボットと、を備える加工装置であって、
該ロボットは、ウェーハを保持するロボットハンドと、該ロボットハンドが保持したウェーハを検知するセンサと、該ロボットハンドを水平方向に移動させる水平移動機構と、該ロボットハンドを鉛直方向に移動させる鉛直移動機構と、を備え、
予め設定した該ロボットハンドの水平方向位置における該センサの検知結果によって、該カセットからウェーハが飛び出しているか否かを判断する判断部を更に備える加工装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、カセットに対してウェーハを搬送するロボットを備えた加工装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1及び2は、ウェーハを研削する研削装置を開示している。特許文献1及び2では、研削したウェーハをスピンナテーブルに保持させて洗浄した後、ロボットハンドでウェーハを保持し、スピンナテーブルからカセット内へ搬送して収納している。このとき、ウェーハを保持したロボットハンドをカセット内に進入させ、ロボットハンドからウェーハを離隔させた後、カセット内からロボットハンドを退出させている。
【先行技術文献】
【特許文献】
【0003】
特開2018-207032号公報
特開2021-132181号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1及び2にて、カセット内からロボットハンドを退出させる際に、静電気等によってロボットハンドに引き付けられたウェーハをカセットから持ち出す場合がある。この場合、カセットからウェーハが落下したり、カセットから飛び出した状態のウェーハにロボットが接触したりし、ウェーハを破損させることがある。
【0005】
本発明はかかる点に鑑みてなされたものであり、ロボットハンドをカセットから退出させる際に、ウェーハを破損させることを防止できる加工装置を提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
本発明の一態様の加工装置は、ウェーハを収納する複数の棚を有するカセットを載置するカセットステージと、ウェーハを保持するチャックテーブルと、ウェーハを加工する加工ユニットと、該カセットステージに載置した該カセットに対してウェーハを搬入および搬出するロボットと、を備える加工装置であって、該ロボットは、ウェーハを保持するロボットハンドと、該ロボットハンドが保持したウェーハを検知するセンサと、該ロボットハンドを水平方向に移動させる水平移動機構と、該ロボットハンドを鉛直方向に移動させる鉛直移動機構と、を備え、予め設定した該ロボットハンドの水平方向位置における該センサの検知結果によって、該カセットからウェーハが飛び出しているか否かを判断する判断部を更に備える。
【発明の効果】
【0007】
本発明によれば、カセット内からロボットハンドを退出させる際に、センサの検出結果によりカセットからのウェーハの飛び出しを判断部で判断することができる。これにより、かかる飛び出しを作業者に対して通知することが可能となり、カセットからのウェーハの落下や、カセットから飛び出したウェーハとロボットとの接触により、ウェーハが破損することを防止することができる。
【図面の簡単な説明】
【0008】
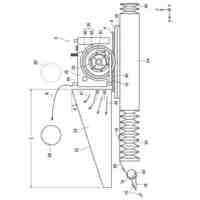
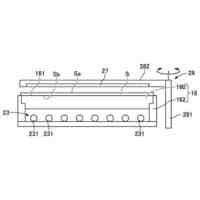
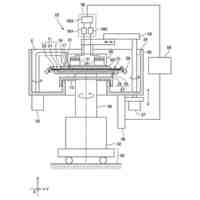
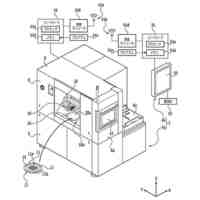
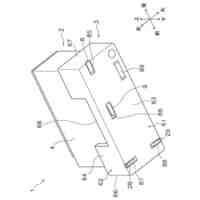
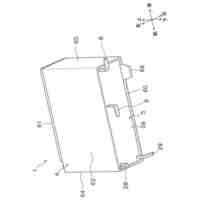
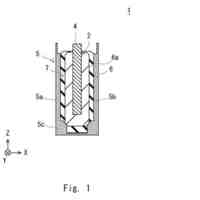
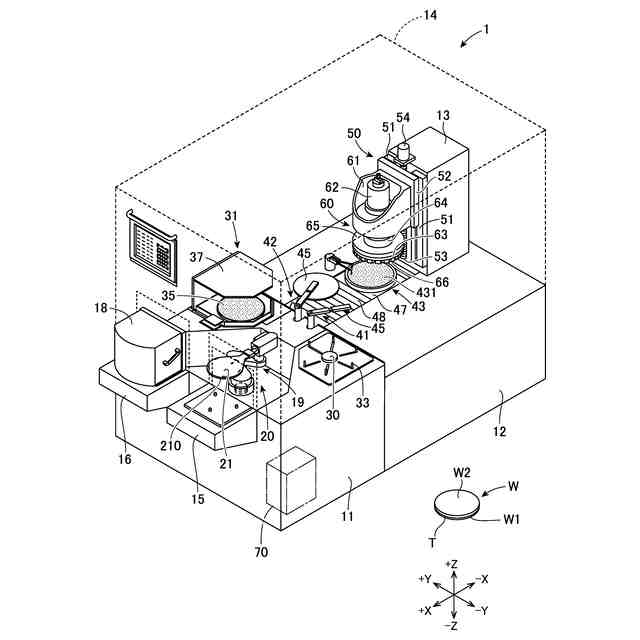
実施の形態の研削装置の斜視図である。
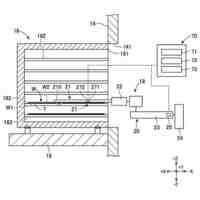
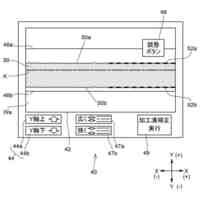
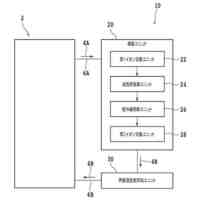
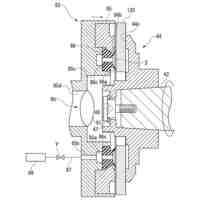
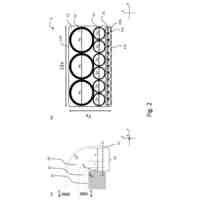
ロボット、第2カセット及びその周辺構造の概略構成図である。
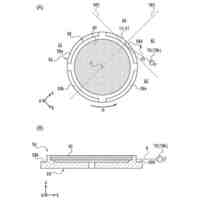
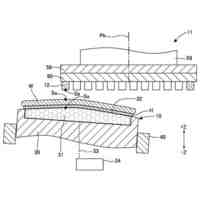
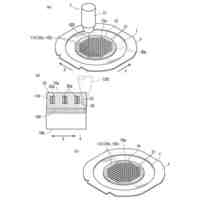
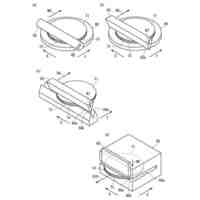
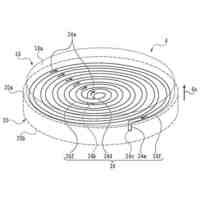
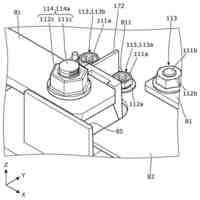
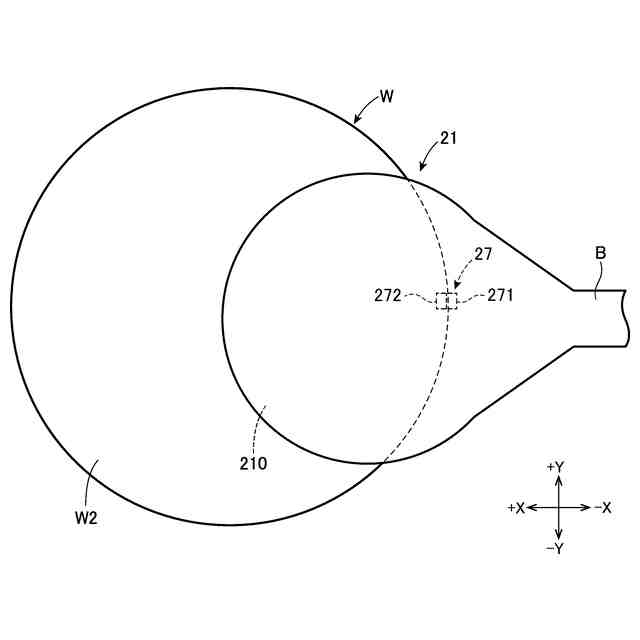
ロボットハンド及びウェーハの平面図である。
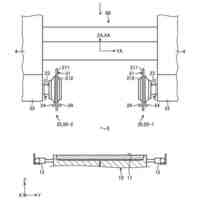
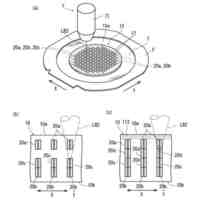
第2カセットからロボットハンドを退出する中途段階の説明図である。
第2カセットからウェーハが飛び出した状態の説明図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照して、実施の形態に係る加工装置が研削装置に適用された場合について説明する。なお、実施の形態に係る研削装置は、以下に示す構成に限定されず、適宜変更が可能である。
【0010】
図1は、実施の形態の研削装置の斜視図である。まず、図1を参照して、研削装置1の全体構成について説明する。図1に示すX軸方向、Y軸方向、Z軸方向は互いに垂直な関係にある。X軸方向とY軸方向は略水平な方向であり、Z軸方向は上下方向(鉛直方向)である。また、以下の各図において、X軸方向手前側を+X側、後側を-X側とし、Y軸方向左側を+Y側、右側を-Y側とし、Z軸方向上側を+Z側、下側を-Z側と呼ぶ場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ディスコ
加工装置
2日前
株式会社ディスコ
加工方法
20日前
株式会社ディスコ
洗浄装置
17日前
株式会社ディスコ
切削装置
16日前
株式会社ディスコ
加工装置
5日前
株式会社ディスコ
切削装置
16日前
株式会社ディスコ
チップの製造方法
6日前
株式会社ディスコ
保護部材形成装置
2日前
株式会社ディスコ
保護部材の形成方法
16日前
株式会社ディスコ
ウェーハの研削方法
2日前
株式会社ディスコ
ウエーハの加工方法
3日前
株式会社ディスコ
ウエーハの加工方法
3日前
株式会社ディスコ
保護部材の固定方法
5日前
株式会社ディスコ
ウエーハの分割方法
16日前
株式会社ディスコ
ウエーハの加工方法
16日前
株式会社ディスコ
加工装置、及び、加工方法
20日前
株式会社ディスコ
バリ除去装置、バリ除去方法
2日前
株式会社ディスコ
チャックテーブル及び加工装置
2日前
株式会社ディスコ
システム、制御方法、及び、プログラム
16日前
株式会社ディスコ
被加工物の加工準備方法、及び、加工方法
6日前
株式会社ディスコ
ウェーハの研削方法及びウェーハの製造方法
17日前
株式会社ディスコ
液体の精製方法、液体精製システム及び精製装置
3日前
株式会社ディスコ
端面修正砥石、フランジ端面修正方法及び切削装置
3日前
株式会社ディスコ
フィルム付き支持フレーム、支持フレーム及び被支持物の処理方法
5日前
個人
超音波接合
1か月前
APB株式会社
二次電池
3日前
甲神電機株式会社
変流器
9日前
ローム株式会社
半導体装置
5日前
太陽誘電株式会社
全固体電池
4日前
オムロン株式会社
電磁継電器
17日前
オムロン株式会社
電磁継電器
17日前
株式会社GSユアサ
蓄電装置
16日前
トヨタ自動車株式会社
集合導線
5日前
トヨタ自動車株式会社
二次電池
4日前
シチズン電子株式会社
発光装置
1か月前
トヨタ自動車株式会社
二次電池
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ