TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025079500
公報種別
公開特許公報(A)
公開日
2025-05-22
出願番号
2023192215
出願日
2023-11-10
発明の名称
ビーム制御器、無線通信装置、およびビーム制御方法
出願人
日本無線株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
H04B
7/08 20060101AFI20250515BHJP(電気通信技術)
要約
【課題】従来より短時間で相手局の信号を捕捉、あるいは追尾できるビーム制御器を提供する。
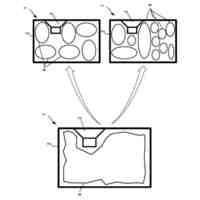
【解決手段】コニカルスキャンを行うアンテナの受信ビームの方向を制御するビーム制御器であって、今回のコニカルスキャンにおける複数の受信ビーム各々における受信レベルを取得し、受信レベルの勾配に基づき、次の回のコニカルスキャンにおける複数の受信ビームを決定する、ビーム制御器である。
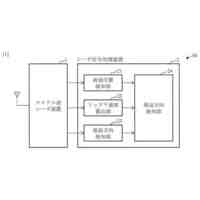
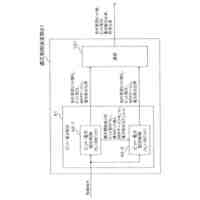
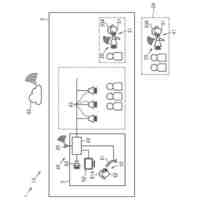
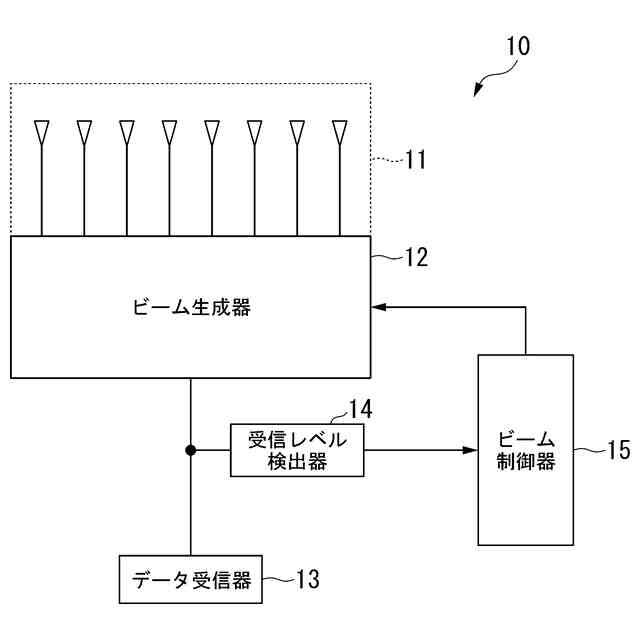
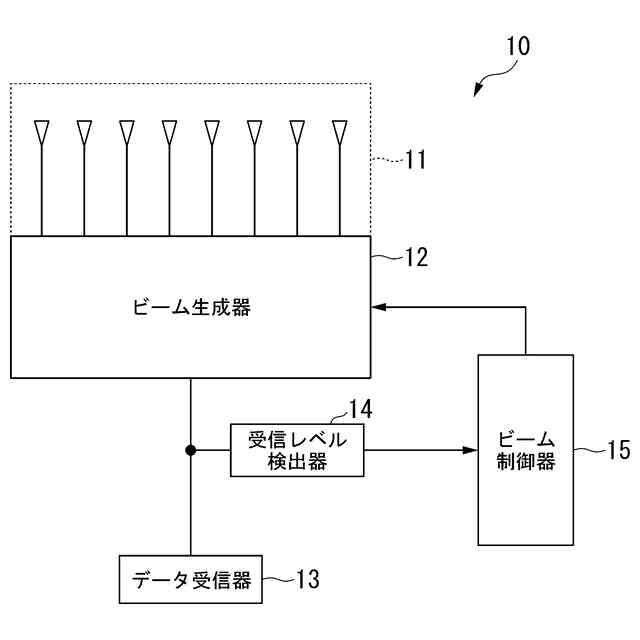
【選択図】図1
特許請求の範囲
【請求項1】
コニカルスキャンを行うアンテナの受信ビームの方向を制御するビーム制御器であって、
今回のコニカルスキャンにおける複数の受信ビーム各々における受信レベルを取得し、前記受信レベルの勾配に基づき、次の回のコニカルスキャンにおける複数の受信ビームを決定する、ビーム制御器。
続きを表示(約 770 文字)
【請求項2】
各コニカルスキャンにおける複数の受信ビームは、少なくとも、回転軸と前記回転軸からの振り幅とに基づき決まり、
第1の回の次の回である第2の回のコニカルスキャンの回転軸は、前記第1の回のコニカルスキャンの回転軸を、移動量の大きさ分、追尾方向に移動させることで決定され、
前記第1の回のコニカルスキャンにおける複数の受信ビーム各々における受信レベルの受信ビーム間の勾配を合成することで、前記追尾方向を算出する、
請求項1に記載のビーム制御器。
【請求項3】
前記受信レベルの勾配の合成結果が小さいほど、前記移動量を小さくする、
請求項2に記載のビーム制御器。
【請求項4】
前記第1の回のコニカルスキャンにおける前記複数の受信ビーム各々における受信レベルの勾配の合成結果に基づき、前記第2の回のコニカルスキャンにおける振り幅を決定する、
請求項2に記載のビーム制御器。
【請求項5】
コニカルスキャンを行うアンテナの受信ビームの方向を制御するビーム制御部を備え、
前記ビーム制御部は、今回のコニカルスキャンにおける複数の受信ビーム各々における受信レベルを取得し、前記受信レベルの勾配に基づき、次の回のコニカルスキャンにおける複数の受信ビームを決定する、
無線通信装置。
【請求項6】
コニカルスキャンを行うアンテナの受信ビームの方向を制御するビーム制御方法であって、
今回のコニカルスキャンにおける複数の受信ビーム各々における受信レベルを取得するステップと、
前記受信レベルの勾配に基づき、次の回のコニカルスキャンにおける複数の受信ビームを決定するステップと
を有する、ビーム制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ビーム制御器、無線通信装置、およびビーム制御方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
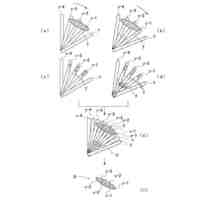
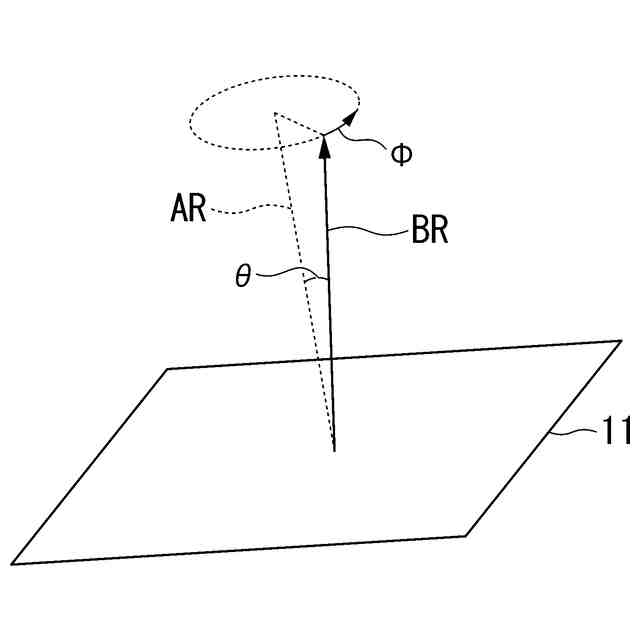
衛星通信の車載局などには、衛星などの相手局を捕捉、追尾するために、アンテナを微少な角度で振らせている間、受信レベルを監視し、最も受信レベルが大となる方向を検出してアンテナをその方向に制御するコニカルスキャンを用いるものがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2006-270806号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のコニカルスキャンにおいては、例えば、200点など、多数のサンプル点における受信レベルを監視し、アンテナの方向を制御するため、相手局の信号を捕捉、あるいは追尾するのに時間を要することがあるという問題がある。
【0005】
本発明は、このような事情に鑑みてなされたもので、従来より短時間で相手局の信号を捕捉、あるいは追尾できるビーム制御器、無線通信装置、およびビーム制御方法を提供する。
【課題を解決するための手段】
【0006】
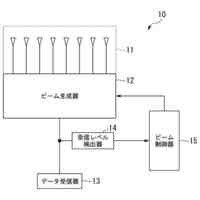
この発明は上述した課題を解決するためになされたもので、本発明の一態様は、コニカルスキャンを行うアンテナの受信ビームの方向を制御するビーム制御器であって、今回のコニカルスキャンにおける複数の受信ビーム各々における受信レベルを取得し、前記受信レベルの勾配に基づき、次の回のコニカルスキャンにおける複数の受信ビームを決定する、ビーム制御器である。
【0007】
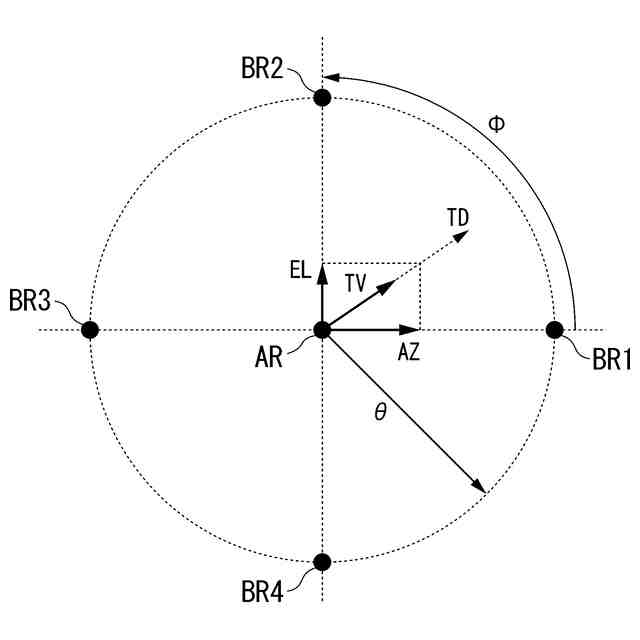
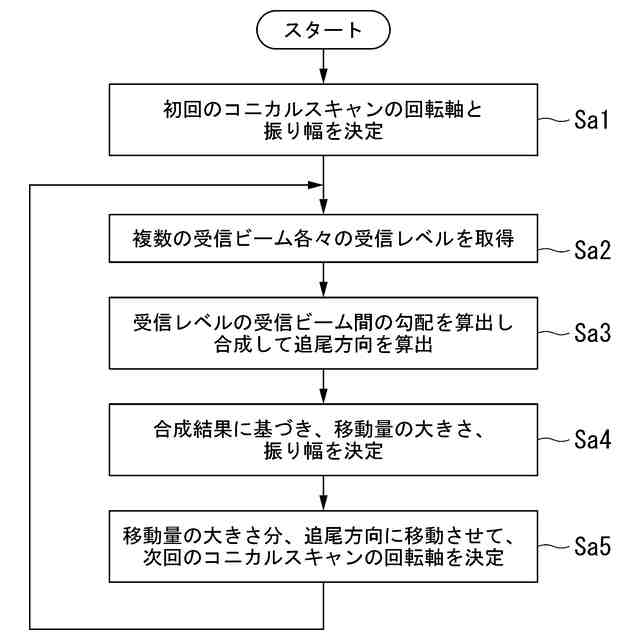
また、本発明の他の一態様は、上述のビーム制御器であって、各コニカルスキャンにおける複数の受信ビームは、少なくとも、回転軸と前記回転軸からの振り幅とに基づき決まり、第1の回の次の回である第2の回のコニカルスキャンの回転軸は、前記第1の回のコニカルスキャンの回転軸を、移動量の大きさ分、追尾方向に移動させることで決定され、前記第1の回のコニカルスキャンにおける複数の受信ビーム各々における受信レベルの受信ビーム間の勾配を合成することで、前記追尾方向を算出する。
【0008】
また、本発明の他の一態様は、上述のビーム制御器であって、前記受信レベルの勾配の合成結果が小さいほど、前記移動量を小さくする。
【0009】
また、本発明の他の一態様は、上述のビーム制御器であって、前記第1の回のコニカルスキャンにおける前記複数の受信ビーム各々における受信レベルの勾配の合成結果に基づき、前記第2の回のコニカルスキャンにおける振り幅を決定する。
【0010】
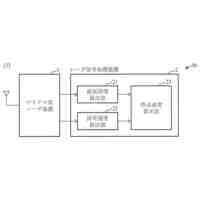
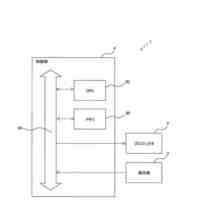
また、本発明の他の一態様は、コニカルスキャンを行うアンテナの受信ビームの方向を制御するビーム制御部を備え、前記ビーム制御部は、今回のコニカルスキャンにおける複数の受信ビーム各々における受信レベルを取得し、前記受信レベルの勾配に基づき、次の回のコニカルスキャンにおける複数の受信ビームを決定する、無線通信装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本無線株式会社
複数ケーブル用密閉構造
10日前
日本無線株式会社
物標探知装置および探知画像生成方法
11日前
日本無線株式会社
物標探知装置および探知画像処理方法
11日前
日本無線株式会社
波浪解析装置、レーダ装置および波浪解析方法
5日前
日本無線株式会社
ビーム制御器、無線通信装置、およびビーム制御方法
16日前
日本無線株式会社
気象レーダ用送信機および気象レーダ用送信機における送信電力調整方法
15日前
日本無線株式会社
レーダ発信源検知装置、レーダ発信源検知ドローン及びレーダ発信源検知プログラム
2日前
日本無線株式会社
海洋マイクロ波レーダ信号処理装置、海洋マイクロ波レーダ信号処理プログラム及び海洋マイクロ波レーダシステム
15日前
日本無線株式会社
海洋マイクロ波レーダ信号処理装置、海洋マイクロ波レーダ信号処理プログラム及び海洋マイクロ波レーダシステム
22日前
日本無線株式会社
テストデータ補間方法、テストデータ補間プログラム、水位予測データ出力方法、水位予測データ出力プログラム、水位予測的中率算出方法及び水位予測的中率算出プログラム
9日前
個人
音響装置
23日前
個人
携帯端末保持具
26日前
個人
防犯AIプラグイン
2か月前
個人
電気音響変換装置
2か月前
個人
テレビ会議拡張システム
1か月前
日本無線株式会社
音声通信方式
23日前
日本精機株式会社
投影システム
29日前
日本放送協会
無線通信装置
2か月前
キヤノン株式会社
通信装置
12日前
日本精機株式会社
車両用表示装置
10日前
ヤマハ株式会社
音響出力装置
1か月前
TOA株式会社
音響システム
2か月前
キヤノン電子株式会社
画像読取装置
26日前
キヤノン電子株式会社
画像読取装置
23日前
ヤマハ株式会社
音響出力装置
1か月前
キヤノン電子株式会社
画像処理装置
2か月前
キヤノン電子株式会社
画像処理装置
2か月前
キヤノン電子株式会社
画像読取装置
1か月前
個人
無線中継赤外線コピーリモコン
2か月前
個人
補聴器のイヤピース耳穴挿入具
16日前
リオン株式会社
電気機械変換器
10日前
キヤノン株式会社
撮影システム
16日前
オムロン株式会社
スレーブ装置
1か月前
キヤノン株式会社
画像読取装置
1か月前
日本放送協会
映像伝送システム
25日前
キヤノン株式会社
映像表示装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ