TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025080164
公報種別
公開特許公報(A)
公開日
2025-05-23
出願番号
2023193218
出願日
2023-11-13
発明の名称
ステアリングホイールのハンズオン判定装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B62D
6/00 20060101AFI20250516BHJP(鉄道以外の路面車両)
要約
【課題】誤判定を抑制可能なステアリングホイールのハンズオン判定装置を提供する。
【解決手段】ステアリングホイールのハンズオン判定装置は、ステアリングホイールに付与されているトルクを検知するためのセンサを含む車載センサと、前記トルクがトルク閾値を超えている場合に、運転者が前記ステアリングホイールを把持しているハンズオン状態であると判定するプロセッサと、を備える。前記車載センサは、自車両の車体の姿勢に関する情報を取得するためのセンサを含み、前記プロセッサは、前記センサから取得した情報に基づいて、前記車体の現在の姿勢が、所定の基準姿勢であって、自車両が水平な路面に停車された状態の姿勢に一致していると判定した場合に、前記トルク閾値に所定の標準値を割り当て、前記車体の現在の姿勢が、前記基準姿勢とは異なると判定した場合に、前記トルク閾値に前記標準値よりも大きい所定値を割り当てる。
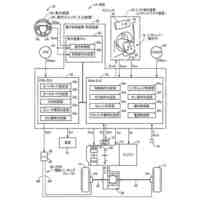
【選択図】図2
特許請求の範囲
【請求項1】
ステアリングホイールに付与されているトルクを検知するためのステアリングセンサを含む車載センサと、
前記トルクがトルク閾値を超えている場合に、運転者が前記ステアリングホイールを把持しているハンズオン状態であると判定するプロセッサと、
を備えたステアリングホイールのハンズオン判定装置であって、
前記車載センサは、自車両の車体の姿勢に関する情報を取得するための姿勢センサを含み、
前記プロセッサは、前記姿勢センサから取得した情報に基づいて、
前記車体の現在の姿勢が、所定の基準姿勢であって、自車両が水平な路面に停車された状態の姿勢に一致していると判定した場合に、前記トルク閾値に所定の標準値を割り当て、
前記車体の現在の姿勢が、前記基準姿勢とは異なると判定した場合に、前記トルク閾値に前記標準値よりも大きい所定値を割り当てる、
ように構成されたステアリングホイールのハンズオン判定装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載のステアリングホイールのハンズオン判定装置において、
前記プロセッサは、前記車体にピッチングが生じていることを検知した場合に、前記トルク閾値に、所定の第一トルク値を割り当てる、ステアリングホイールのハンズオン判定装置。
【請求項3】
請求項1又は請求項2に記載のステアリングホイールのハンズオン判定装置において、
前記プロセッサは、前記車体にローリングが生じていることを検知した場合に、前記トルク閾値に、第二トルク値を割り当てる、ステアリングホイールのハンズオン判定装置。
【請求項4】
ステアリングホイールに付与されているトルクを検知するトルク検知ステップと、
前記トルクがトルク閾値を超えている場合に、運転者が前記ステアリングホイールを把持しているハンズオン状態であると判定する判定ステップと、
を含むステアリングホイールのハンズオン判定方法であって、
自車両の車体の姿勢に関する情報を取得する姿勢情報取得ステップを含み、
前記判定ステップは、前記姿勢情報取得ステップにて取得した情報に基づいて、
前記車体の現在の姿勢が、所定の基準姿勢であって、自車両が水平な路面に停車された状態の姿勢に一致していると判定した場合に、前記トルク閾値に所定の標準値を割り当て、
前記車体の現在の姿勢が、前記基準姿勢とは異なると判定した場合に、前記トルク閾値に前記標準値よりも大きい所定値を割り当てる、
閾値設定ステップを含む、ように構成されたステアリングホイールのハンズオン判定方法。
【請求項5】
自車両が備えるコンピュータに、
ステアリングホイールに付与されているトルクを検知するトルク検知ステップと、
前記トルクがトルク閾値を超えている場合に、運転者が前記ステアリングホイールを把持しているハンズオン状態であると判定する判定ステップと、
を実行させるハンズオン判定プログラムであって、
前記判定ステップは、自車両の車体の姿勢に関する情報を取得する姿勢情報取得ステップ含み、
前記判定ステップは、前記姿勢情報取得ステップにて取得した情報に基づいて、
前記車体の現在の姿勢が、所定の基準姿勢であって、自車両が水平な路面に停車された状態の姿勢に一致していると判定した場合に、前記トルク閾値に所定の標準値を割り当て、
前記車体の現在の姿勢が、前記基準姿勢とは異なると判定した場合に、前記トルク閾値に前記標準値よりも大きい所定値を割り当てる、
閾値設定ステップを含む、ように構成されたステアリングホイールのハンズオン判定プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転者が自車両のステアリングホイールをに把持しているか否かを判定するステアリングホイールのハンズオン判定装置に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
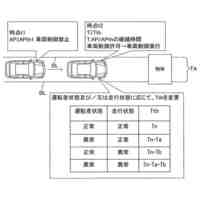
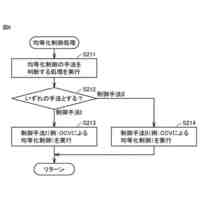
所定の条件が成立している場合に、運転者の運転操作を支援する運転支援装置が提案されている。例えば、運転支援装置は、高速道路又は自動車専用道路において渋滞が生じている場合に、自車両を走行レーンに沿って進行させるADTJA機能(ADTJA=Advanced Drive Traffic Jam Assist)を備える。ADTJA機能が有効化されている状況下で、所定のハンズオフ条件が成立している場合に、運転者がステアリングホイールから手を離すこと(ハンズオフ)が許容される。ハンズオフ状態においてハンズオフ条件が不成立になった場合(例えば、運転者が前方を注目していないことを運転支援装置が検知した場合、レーンマーク(走行レーンの区画線)を運転支援装置が認識できなくなった場合など)、運転支援装置は、運転者に対し、ステアリングホイールを把持すること(ハンズオン)を促すための警報を発する。そして、運転支援装置は、運転者がステアリングホイールを把持したことを検知すると、当該警報を終了する。
【0003】
上記の運転支援装置は、運転者がステアリングホイールを把持しているか否かを判定する装置(ステアリングホイールのハンズオン判定装置)を含む。(例えば、下記特許文献1を参照)。この装置(以下、従来装置と称呼する。)は、ステアリングホイールを回転させる外力(トルク)を検知するセンサを含む。従来装置は、当該センサの出力値が閾値を超えている場合に、運転者がステアリングホイールを把持していると判定する。なお、本明細書において、「把持」及び「ハンズオン」とは、運転者が即座に操舵を開始可能な程度にステアリングホイールに触れている状態を意味する。
【先行技術文献】
【特許文献】
【0004】
特開2019―14468号公報
【発明の概要】
【0005】
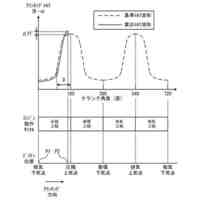
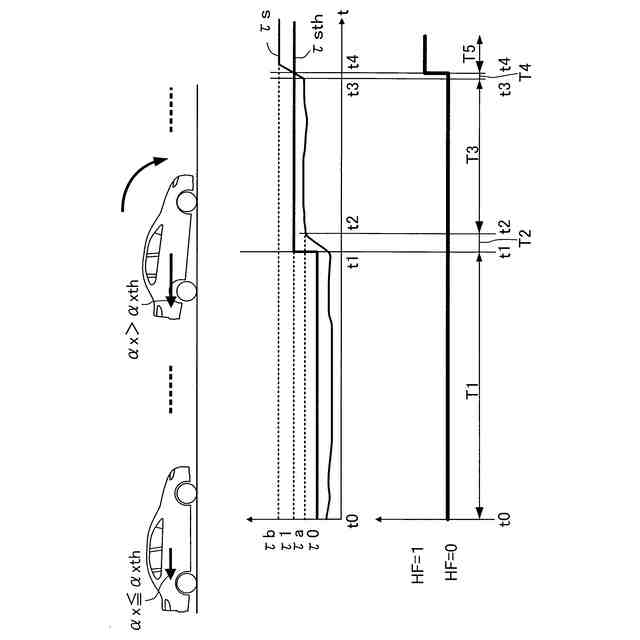
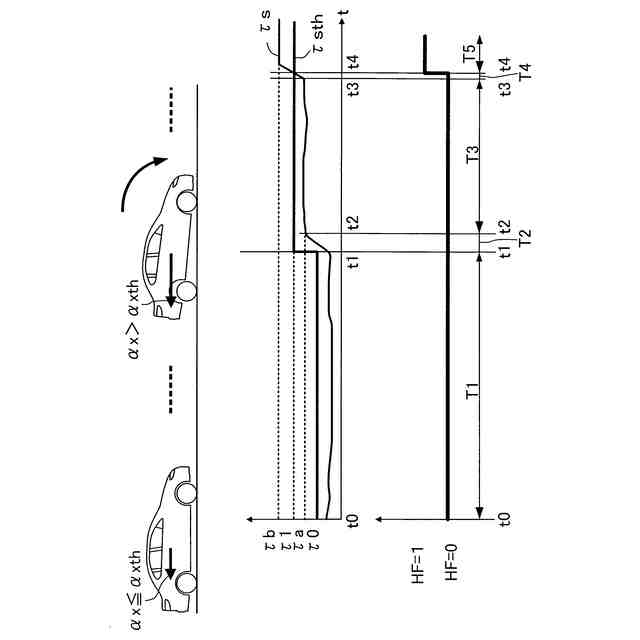
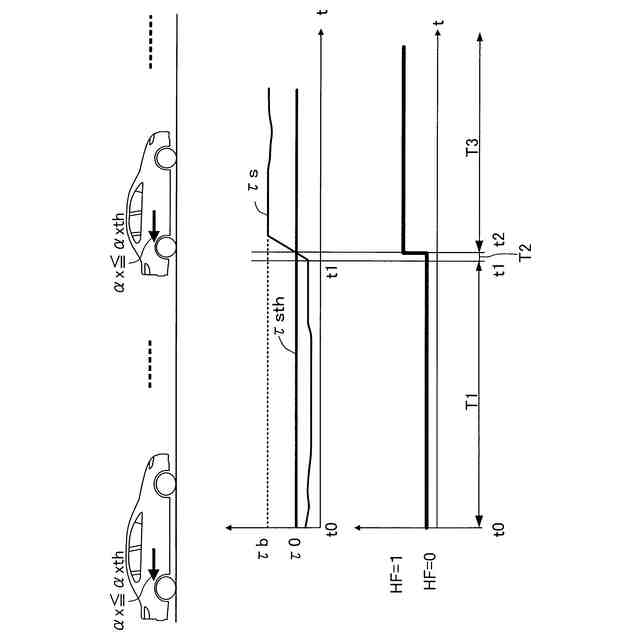
ところで、自車両が加速(減速)及び/又は旋回した際に慣性力が作用することにより車体のピッチング(縦揺れ)、ローリング(横揺れ)など(以下、「姿勢崩れ」と称呼する。)が生じる。例えば、自車両が減速している状況では、自車両の前方へ向かう慣性力が作用することに起因して、車体の前端側が少し下降するピッチング(ノーズダイブ)が生じる。ここで、ハンズオフ状態では、ステアリングホイールの回転が規制されていない。そのため、車体の姿勢崩れに起因して、ステアリングホイールが僅かに回転し、ステアリングホイールのセンサの出力値(トルク値)が増大し、一時的に前記閾値を超える場合がある。この場合、ステアリングホールが把持されていないにもかかわらず、従来装置は、ステアリングホイールが把持されていると判定(誤判定)してしまう虞がある。
【0006】
本発明の目的の一つは、誤判定を抑制可能なステアリングホイールのハンズオン判定装置を提供することにある。
【0007】
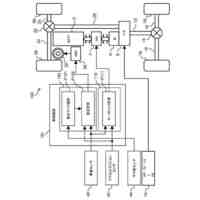
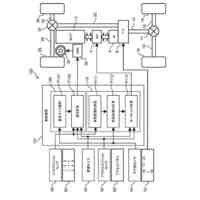
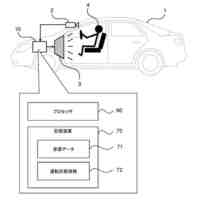
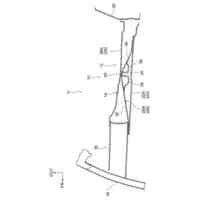
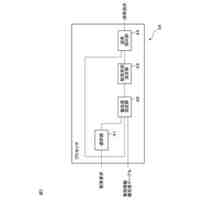
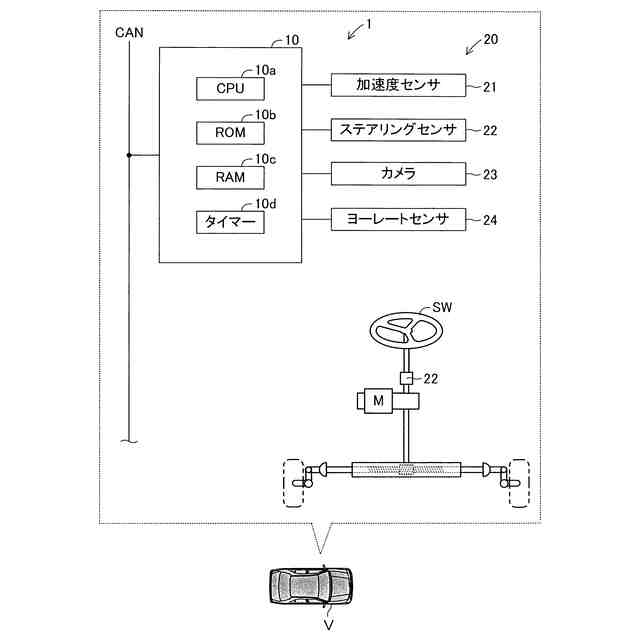
上記課題を解決するために、本発明のステアリングホイールのハンズオン判定装置(1)は、
ステアリングホイール(SW)に付与されているトルク(τs)を検知するためのステアリングセンサ(22)を含む車載センサ(20)と、
前記トルクがトルク閾値(τsth)を超えている場合に、運転者が前記ステアリングホイールを把持しているハンズオン状態であると判定するプロセッサ(10)と、
を備える。
前記車載センサは、自車両の車体の姿勢に関する情報(αx,αy,G,YR)を取得するための姿勢センサ(21,23,24)を含み、
前記プロセッサは、前記姿勢センサから取得した情報に基づいて、
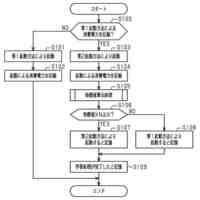
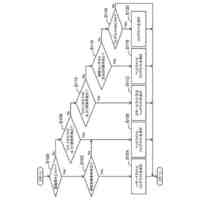
前記車体の現在の姿勢が、所定の基準姿勢であって、自車両が水平な路面に停車された状態の姿勢に一致していると判定した場合に、前記トルク閾値に所定の標準値(τ0)を割り当て、
前記車体の現在の姿勢が、前記基準姿勢とは異なると判定した場合に、前記トルク閾値に前記標準値よりも大きい所定値(τ1,τ2,τ3)を割り当てる、
ように構成される。
【0008】
また、本発明に係るステアリングホイールのハンズオン判定方法は、
ステアリングホイールに付与されているトルクを検知するトルク検知ステップと、
前記トルクがトルク閾値を超えている場合に、運転者が前記ステアリングホイールを把持しているハンズオン状態であると判定する判定ステップと、
を含む。
自車両の車体の姿勢に関する情報を取得する姿勢情報取得ステップを含み、
前記判定ステップは、前記姿勢情報取得ステップにて取得した情報に基づいて、
前記車体の現在の姿勢が、所定の基準姿勢であって、自車両が水平な路面に停車された状態の姿勢に一致していると判定した場合に、前記トルク閾値に所定の標準値を割り当て、
前記車体の現在の姿勢が、前記基準姿勢とは異なると判定した場合に、前記トルク閾値に前記標準値よりも大きい所定値を割り当てる、
閾値設定ステップを含む。
【0009】
また、本発明に係るステアリングホイールのハンズオン判定プログラムは、
自車両が備えるコンピュータに、
ステアリングホイールに付与されているトルクを検知するトルク検知ステップと、
前記トルクがトルク閾値を超えている場合に、運転者が前記ステアリングホイールを把持しているハンズオン状態であると判定する判定ステップと、
を実行させる。
前記判定ステップは、自車両の車体の姿勢に関する情報を取得する姿勢情報取得ステップ含み、
前記判定ステップは、前記姿勢情報取得ステップにて取得した情報に基づいて、
前記車体の現在の姿勢が、所定の基準姿勢であって、自車両が水平な路面に停車された状態の姿勢に一致していると判定した場合に、前記トルク閾値に所定の標準値を割り当て、
前記車体の現在の姿勢が、前記基準姿勢とは異なると判定した場合に、前記トルク閾値に前記標準値よりも大きい所定値を割り当てる、
閾値設定ステップを含む。
【0010】
上述したように、運転者がステアリングホイールを把持していない状況下で車体の姿勢崩れが生じたことに起因してステアリングホイールが少し回転することにより、ステアリングセンサの出力値(検知されたトルク値)が増大するシーン(以下、「特定シーン」と称呼する。)が想定される。本発明によれば、自車両の車体の姿勢が基準姿勢とは異なる場合(車体の姿勢崩れが生じている場合)に、トルク閾値が引き上げられる。よって、特定シーンにおいて、トルク閾値が引き上げられない場合に比べて、ステアリングセンサの出力値がトルク閾値を超え難い。そのため、特定シーンにおいて、運転者がステアリングホイールを把持していないにもかかわらず、運転者がステアリングホイールを把持していると判定されること(誤判定)が抑制される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電池
2日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
表示装置
今日
トヨタ自動車株式会社
管理装置
今日
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
電気自動車
3日前
トヨタ自動車株式会社
シム構造体
3日前
トヨタ自動車株式会社
電気自動車
3日前
トヨタ自動車株式会社
電気自動車
3日前
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
ペダル機構
今日
トヨタ自動車株式会社
サーバ装置
3日前
トヨタ自動車株式会社
電気自動車
3日前
トヨタ自動車株式会社
電気自動車
3日前
トヨタ自動車株式会社
電池システム
1日前
トヨタ自動車株式会社
車両内装構造
3日前
トヨタ自動車株式会社
情報処理装置
1日前
トヨタ自動車株式会社
欠け検査装置
3日前
トヨタ自動車株式会社
車両前部構造
3日前
トヨタ自動車株式会社
車両制御装置
3日前
トヨタ自動車株式会社
作業解析装置
3日前
トヨタ自動車株式会社
更新システム
3日前
トヨタ自動車株式会社
配車管理装置
3日前
トヨタ自動車株式会社
電池システム
今日
トヨタ自動車株式会社
灯火制御装置
3日前
トヨタ自動車株式会社
車両前部構造
3日前
トヨタ自動車株式会社
車両前部構造
3日前
トヨタ自動車株式会社
車両下部構造
今日
トヨタ自動車株式会社
車両前部構造
3日前
トヨタ自動車株式会社
車両の制御装置
今日
トヨタ自動車株式会社
腐食量予測装置
2日前
トヨタ自動車株式会社
CAEシステム
2日前
トヨタ自動車株式会社
電池の充電装置
2日前
トヨタ自動車株式会社
溶解度測定装置
1日前
トヨタ自動車株式会社
電池モジュール
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ