TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025082980
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2023196581
出願日
2023-11-20
発明の名称
追従対象車両決定方法、プログラム、追従対象車両決定装置、及び自律移動体
出願人
国立大学法人金沢大学
代理人
個人
主分類
B60W
40/04 20060101AFI20250523BHJP(車両一般)
要約
【課題】自車両が追従する対象である対象車両を適切に決定することができる追従対象車両決定方法などを提供する。
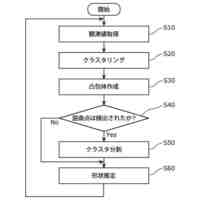
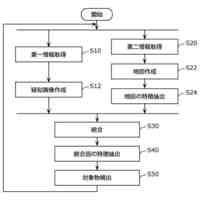
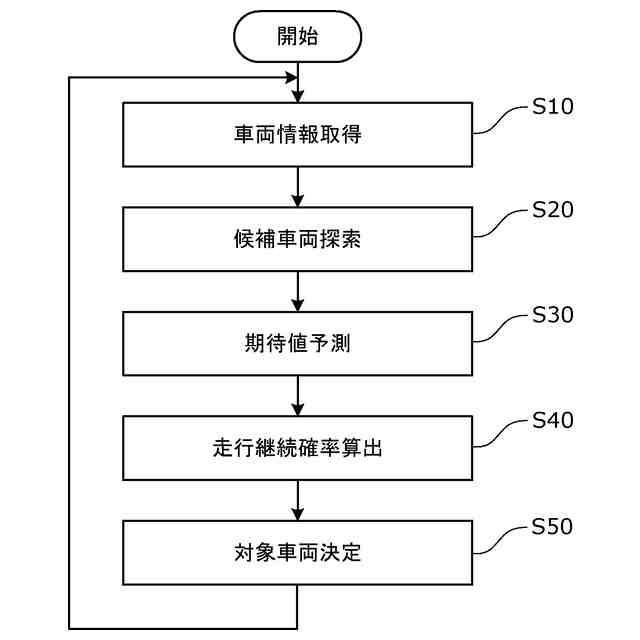
【解決手段】追従対象車両決定方法は、自車両の走行予定経路に基づいて、自車両が追従する対象である対象車両を決定する追従対象車両決定方法であって、対象車両の候補となる候補車両を探索する探索ステップS20と、候補車両の走行態様を表す1以上のパラメータにそれぞれ対応する1以上の期待値を予測する予測ステップS30と、候補車両の1以上のパラメータにそれぞれ対応する1以上の測定値と、1以上の期待値とに基づいて、候補車両が走行予定経路の走行を継続する確率である走行継続確率を算出する算出ステップS40と、走行継続確率に基づいて対象車両を決定する決定ステップS50とを含み、1以上の期待値は、候補車両が走行予定経路を走行し続けると仮定した場合に予測される1以上のパラメータの値である。
【選択図】図4
特許請求の範囲
【請求項1】
自車両の走行予定経路に基づいて、前記自車両が追従する対象である対象車両を決定する追従対象車両決定方法であって、
前記対象車両の候補となる候補車両を探索する探索ステップと、
前記候補車両の走行態様を表す1以上のパラメータにそれぞれ対応する1以上の期待値を予測する予測ステップと、
前記候補車両の前記1以上のパラメータにそれぞれ対応する1以上の測定値と、前記1以上の期待値とに基づいて、前記候補車両が前記走行予定経路の走行を継続する確率である走行継続確率を算出する算出ステップと、
前記走行継続確率に基づいて前記対象車両を決定する決定ステップとを含み、
前記1以上の期待値は、前記候補車両が前記走行予定経路を走行し続けると仮定した場合に予測される前記1以上のパラメータの値である
追従対象車両決定方法。
続きを表示(約 1,000 文字)
【請求項2】
前記候補車両は、前記自車両の前方に位置する車両である
請求項1に記載の追従対象車両決定方法。
【請求項3】
前記対象車両は、前記走行予定経路の外部から、前記走行予定経路に移動する車両である
請求項1又は2に記載の追従対象車両決定方法。
【請求項4】
前記対象車両は、前記走行予定経路に合流する経路を走行する車両である
請求項3に記載の追従対象車両決定方法。
【請求項5】
前記候補車両には、路上に止まっている車両が含まれる
請求項1又は2に記載の追従対象車両決定方法。
【請求項6】
前記候補車両には、一時停止位置で停止する車両が含まれる
請求項1又は2に記載の追従対象車両決定方法。
【請求項7】
前記1以上のパラメータは、前記候補車両の速度、前記候補車両の加速度、前記候補車両が走行している車線の端から前記候補車両までの横方向におけるスペース、及び、前記候補車両の車間距離の少なくとも一つを含む
請求項1又は2に記載の追従対象車両決定方法。
【請求項8】
前記1以上のパラメータは、前記候補車両の速度、前記候補車両の加速度、前記候補車両が走行している車線の端から前記候補車両までの横方向におけるスペース、及び、前記候補車両の車間距離のすべてを含む
請求項1又は2に記載の追従対象車両決定方法。
【請求項9】
前記算出ステップにおいて、前記1以上の測定値の各々と前記1以上の期待値のうち当該測定値に対応する期待値との差に対して、前記走行継続確率は所定の確率分布に従うと仮定して、前記走行継続確率を算出する
請求項1又は2に記載の追従対象車両決定方法。
【請求項10】
前記算出ステップにおいて、前記1以上の測定値と、前記1以上の期待値とに基づいて、1以上の個別確率を算出し、
前記1以上の個別確率の各々は、前記1以上の測定値のうちの一つの測定値と、前記1以上の期待値のうち当該一つの測定値に対応する期待値とに基づいて算出される、前記候補車両が前記走行予定経路の走行を継続する確からしさを示し、
前記走行継続確率は、前記1以上の個別確率の重み付け平均である
請求項1又は2に記載の追従対象車両決定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、追従対象車両決定方法、プログラム、追従対象車両決定装置、及び自律移動体に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
現在、車両等の移動体の自動運転に関する研究が活発に進められている。移動体の自動運転において、周辺の移動体との衝突を回避するために、他の移動体が走行する車線などを予測する技術が知られている。特に、自車両の走行予定経路を走行する他車両を追従対象として特定することで、自動運転の性能向上を期待できる。
【0003】
例えば、特許文献1には、自車両の走行経路に割り込む他車両を予測する方法が記載されている。特許文献1に記載された発明においては、道路形状などの所定の条件に基づいて他の車両の、自車両が走行する車線への割り込みを予測しようとしている。
【先行技術文献】
【特許文献】
【0004】
特開2019-153028号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された発明においては、他車両の割り込みの予測が外れる場合があり得るが、そのような場合については想定されていない。このため、特許文献1に記載された発明は、自車両が追従する対象となる他車両の特定方法には適していない。
【0006】
そこで、本発明は、自車両が追従する対象である対象車両を適切に決定することができる追従対象車両決定方法などを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の一態様に係る追従対象車両決定方法は、自車両の走行予定経路に基づいて、前記自車両が追従する対象である対象車両を決定する追従対象車両決定方法であって、前記対象車両の候補となる候補車両を探索する探索ステップと、前記候補車両の走行態様を表す1以上のパラメータにそれぞれ対応する1以上の期待値を予測する予測ステップと、前記候補車両の前記1以上のパラメータにそれぞれ対応する1以上の測定値と、前記1以上の期待値とに基づいて、前記候補車両が前記走行予定経路の走行を継続する確率である走行継続確率を算出する算出ステップと、前記走行継続確率に基づいて前記対象車両を決定する決定ステップとを含み、前記1以上の期待値は、前記候補車両が前記走行予定経路を走行し続けると仮定した場合に予測される前記1以上のパラメータの値である。
【0008】
また、上記目的を達成するために、本発明の一態様に係るプログラムは、上記追従対象車両決定方法をコンピュータに実行させるためのプログラムである。
【0009】
また、上記目的を達成するために、本発明の一態様に係る追従対象車両決定装置は、自車両の走行予定経路に基づいて、前記自車両が追従する対象である対象車両を決定する追従対象車両決定装置であって、前記対象車両の候補となる候補車両を探索する探索部と、前記候補車両の走行態様を表す1以上のパラメータにそれぞれ対応する1以上の期待値を予測する予測部と、前記候補車両の前記1以上のパラメータにそれぞれ対応する1以上の測定値と、前記1以上の期待値とに基づいて、前記候補車両が前記走行予定経路の走行を継続する確率である走行継続確率を算出する算出部と、前記走行継続確率に基づいて前記対象車両を決定する決定部とを備え、前記1以上の期待値は、前記候補車両が前記走行予定経路を走行し続けると仮定した場合に予測される前記1以上のパラメータの値である。
【0010】
また、上記目的を達成するために、本発明の一態様に係る自律移動体は、上記追従対象車両決定装置と、前記候補車両の情報を取得する車両情報取得部とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人金沢大学
ロボット
5か月前
国立大学法人金沢大学
がん細胞株
5か月前
国立大学法人金沢大学
燃料電池システム
4か月前
国立大学法人金沢大学
燃料電池システム
2か月前
国立大学法人金沢大学
微粒子の製造装置
7日前
国立大学法人金沢大学
太陽電池とその製造方法
4か月前
国立大学法人金沢大学
放射性同位体標識診療薬剤
3か月前
株式会社小松製作所
伸縮機構
5か月前
国立大学法人金沢大学
FOXO阻害剤、及び医薬組成物
6か月前
ミツテック株式会社
物体形状計測装置
5か月前
株式会社小松製作所
カメラシステム及び作業車両
5か月前
トヨタ紡織株式会社
振動刺激装置及び振動刺激方法
6か月前
国立大学法人金沢大学
形状推定方法、プログラム、形状推定装置、及び自律移動体
4か月前
国立大学法人金沢大学
対象物検出方法、プログラム、対象物検出装置、及び自律移動体
2か月前
国立大学法人金沢大学
子宮体癌治療剤、子宮体癌治療方法、子宮体癌の治療のための使用
4か月前
国立大学法人金沢大学
音源方向検出方法、プログラム、音源方向検出装置、及び自律移動体
3か月前
国立大学法人金沢大学
追従対象車両決定方法、プログラム、追従対象車両決定装置、及び自律移動体
2か月前
国立大学法人金沢大学
CAR-T細胞活性化、造血幹細胞増殖、iPS細胞分化を制御する組成物およびその用途
1か月前
国立大学法人金沢大学
ペロブスカイト膜、薄膜太陽電池、ペロブスカイト膜の製造方法及び薄膜太陽電池の製造方法
3日前
株式会社荏原製作所
ワークピースの化学機械研磨システムおよび化学機械研磨方法
29日前
一般財団法人電力中央研究所
直流遮断器
2か月前
個人
カーテント
2か月前
個人
タイヤレバー
8日前
個人
警告装置
3か月前
個人
車窓用防虫網戸
2か月前
個人
小型EVシステム
3か月前
個人
ホイルのボルト締結
1か月前
日本精機株式会社
ケース
4か月前
個人
車輪清掃装置
2か月前
日本精機株式会社
表示装置
6日前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
6日前
日本精機株式会社
表示装置
6日前
井関農機株式会社
作業車両
1か月前
個人
車両通過構造物
9日前
個人
アンチロール制御装置
4か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ