TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025083889
公報種別
公開特許公報(A)
公開日
2025-06-02
出願番号
2023197545
出願日
2023-11-21
発明の名称
搬送システム
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
H02J
7/00 20060101AFI20250526BHJP(電力の発電,変換,配電)
要約
【課題】無人搬送車両の稼働効率を向上させることができる搬送システムを提供する。
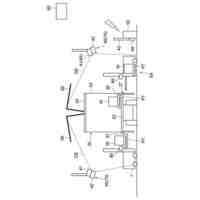
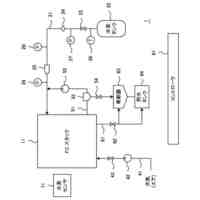
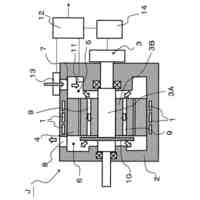
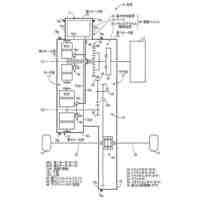
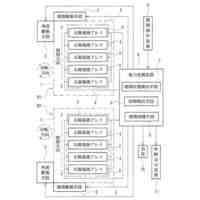
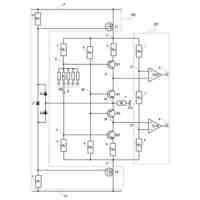
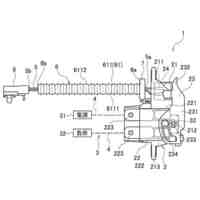
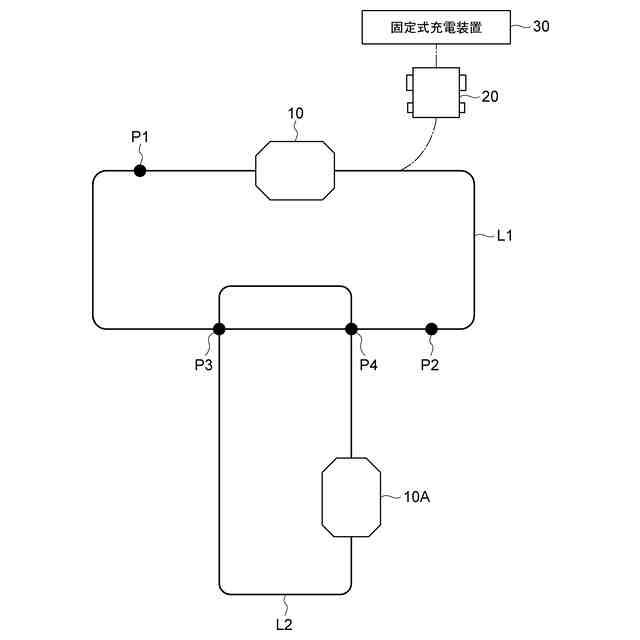
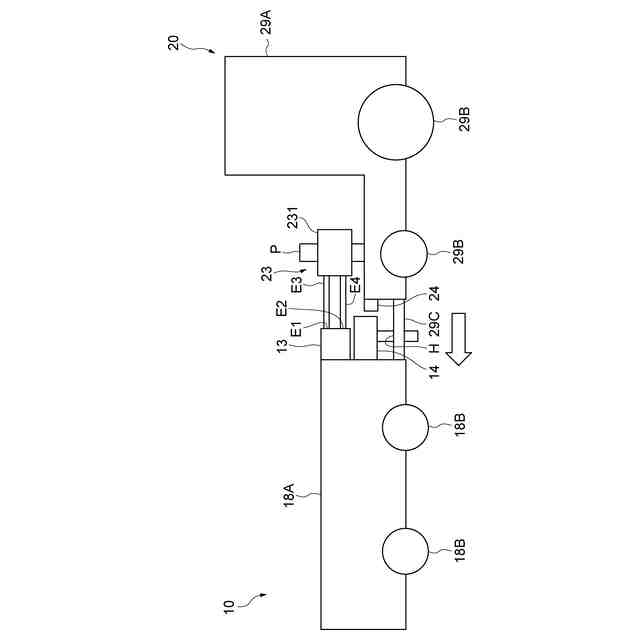
【解決手段】搬送システム1は、運行データに従って所定の作業位置を含む走行経路上を走行するバッテリ12内蔵の無人搬送車両10と、バッテリ12の残容量が所定値を下回った場合に給電を行う自律走行可能な移動式充電装置20と、を備える。移動式充電装置20は、運行データを参照し、無人搬送車両10が走行経路上に位置する第1期間、或いは無人搬送車両10が作業位置にて作業を行う第2期間においてバッテリ12に対する給電を行う。
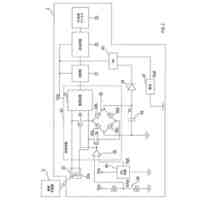
【選択図】図2
特許請求の範囲
【請求項1】
運行データに従って所定の作業位置を含む走行経路上を走行するバッテリ内蔵の無人搬送車両と、
前記バッテリの残容量が所定値を下回った場合に給電を行う自律走行可能な移動式充電装置と、を備え、
前記移動式充電装置は、前記運行データを参照し、前記無人搬送車両が前記走行経路上に位置する第1期間、或いは前記無人搬送車両が前記作業位置にて作業を行う第2期間において前記バッテリに対する給電を行う、搬送システム。
続きを表示(約 410 文字)
【請求項2】
前記移動式充電装置は、前記走行経路の交差点において、前記無人搬送車両が別の無人搬送車両の通過を待機している第3期間を含めて前記バッテリに対する給電を行う、請求項1記載の搬送システム。
【請求項3】
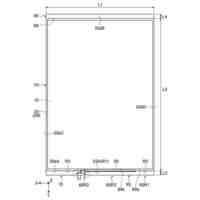
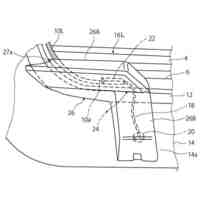
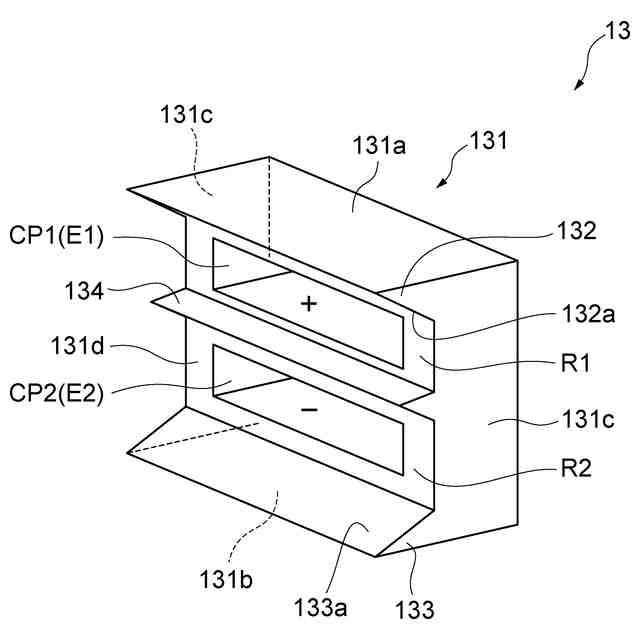
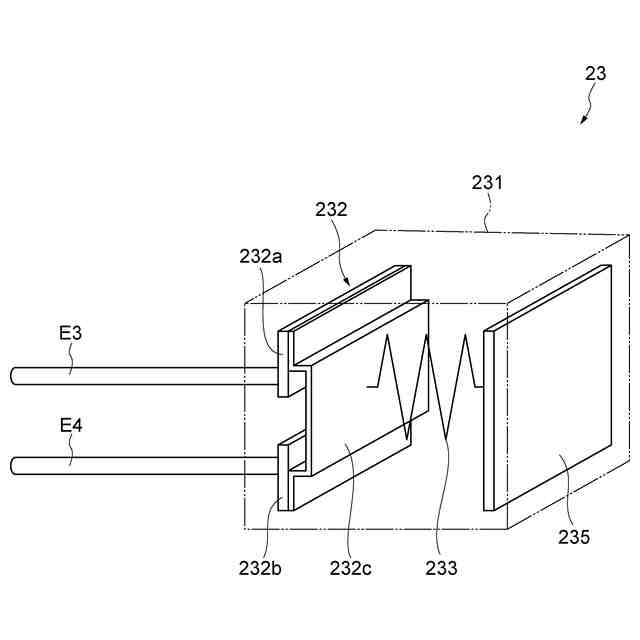
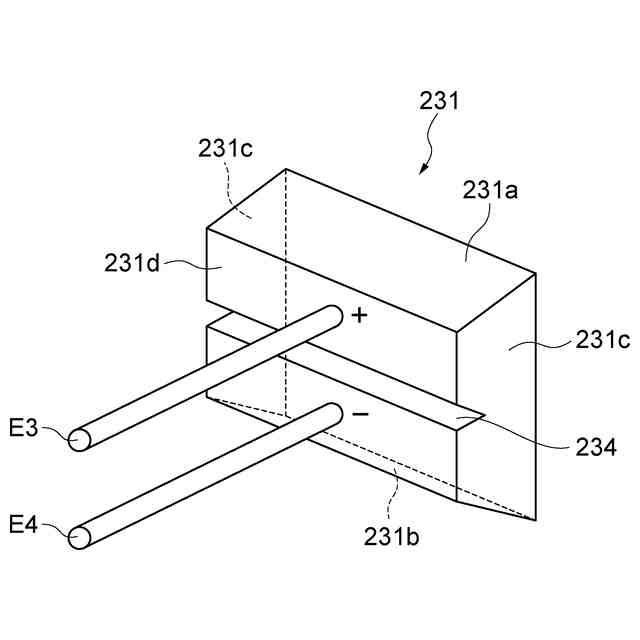
前記移動式充電装置は、前記バッテリの充電部に対して接触式の給電を行う給電部を有し、
前記給電部は、上下に配置された一対の給電電極を有し、
前記充電部は、前記一対の給電電極に対応して上下に配置されると共に、左右に延在する一対の充電電極を有する、請求項1又は2記載の搬送システム。
【請求項4】
前記移動式充電装置は、前記バッテリの充電部に対して非接触式の給電を行う給電部を有し、
前記移動式充電装置は、前記運行データに基づいて、自車両と給電対象の無人搬送車両との間の距離が一定となるように、速度及び操舵の協調制御を行う、請求項1又は2記載の搬送システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、搬送システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
例えば、特許文献1には、自律式作業機が有するバッテリに対して給電を行うための移動ステーションが記載されている。特許文献1に記載の移動ステーションは、その位置が固定された固定ステーションから自律式作業機と共に発進した後、自律式作業機の作業開始位置まで自律式作業機と共に移動し、当該位置にて待機する。自律式作業機は、当該位置から作業を開始し、自車両のバッテリの残容量が低下した場合には、作業を中断し、移動ステーションが待機している位置まで移動する。そして、自律式作業機は、上記位置において移動ステーションからの給電を受けた後に、自車両が作業を中断した位置まで再度移動し、作業を再開する。
【先行技術文献】
【特許文献】
【0003】
特開2021-158829号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した移動ステーションによる給電を、所定の作業位置を含む走行経路上を走行する無人搬送車両に対して適用する場合、移動ステーションを走行経路の近傍に配置することが考えられる。この場合、無人搬送車両は、自車両のバッテリの残容量が低下した場合には、走行又は上記作業位置での作業を中断し、移動ステーションまで移動する。そして、移動ステーションによる給電を受けた後に、再度走行経路上まで移動する。すなわち、上述した移動ステーションによる給電では、移動ステーションとの間の移動に要する時間及び給電に要する時間において、無人搬送車両は走行経路上の走行及び上記作業位置での作業を行うことができず、稼働効率が低下してしまうことが考えられる。
【0005】
本開示は、上記課題の解決のためになされたものであり、無人搬送車両の稼働効率を向上させることができる搬送システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
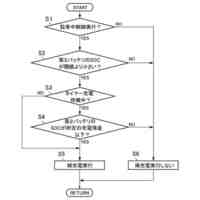
本開示の一側面に係る搬送システムは、運行データに従って所定の作業位置を含む走行経路上を走行するバッテリ内蔵の無人搬送車両と、バッテリの残容量が所定値を下回った場合に給電を行う自律走行可能な移動式充電装置と、を備える。移動式充電装置は、運行データを参照し、無人搬送車両が走行経路上に位置する第1期間、或いは無人搬送車両が作業位置にて作業を行う第2期間においてバッテリに対する給電を行う。
【0007】
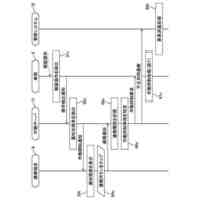
この搬送システムでは、移動式充電装置が、運行データを参照し、無人搬送車両のバッテリの残容量が少なくなった場合に、上記第1期間、或いは上記第2期間において、バッテリに対する給電を行う。この搬送システムでは、バッテリに対する給電のために無人搬送車両が固定式充電装置に移動する必要はなく、走行経路上の走行或いは所定の作業位置での作業を中断する必要もない。すなわち、この搬送システムでは、バッテリに対する給電を荷物の搬送等に関わらない非正味作業として実施するのではなく、無人搬送車両の運行データに基づく正味作業の中で実施するため、無人搬送車両の稼働効率を向上させることができる。
【0008】
移動式充電装置は、走行経路の交差点において、無人搬送車両が別の無人搬送車両の通過を待機している第3期間を含めてバッテリに対する給電を行ってもよい。この場合、交差点において無人搬送車両が別の無人搬送車両の通過を待機している期間にも、移動式充電装置による給電を行うことができ、無人搬送車両の稼働効率の更なる向上が図られる。
【0009】
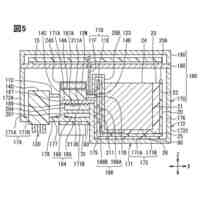
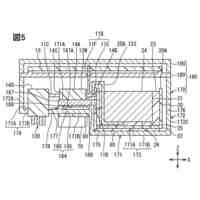
移動式充電装置は、バッテリの充電部に対して接触式の給電を行う給電部を有してもよい。給電部は、上下に配置された一対の給電電極を有してもよい。充電部は、一対の給電電極に対応して上下に配置されると共に、左右に延在する一対の充電電極を有してもよい。この場合、走行経路にカーブ区間が含まれていたとしても、当該カーブ区間において給電電極と充電電極との接触が解除されてしまうことを抑制できる。
【0010】
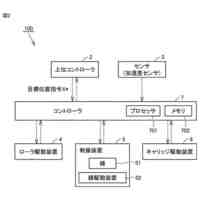
移動式充電装置は、バッテリの充電部に対して非接触式の給電を行う給電部を有してもよい。移動式充電装置は、運行データに基づいて、自車両と給電対象の無人搬送車両との間の距離が一定となるように、速度及び操舵の協調制御を行ってもよい。非接触式の給電を行う場合は、無人搬送車両と移動式充電装置との間の距離が一定となるように速度及び操舵の協調制御を行うことで、正味作業の中での移動式充電装置による給電を好適に実施できる。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社豊田自動織機
分散板
3日前
株式会社豊田自動織機
蓄電装置
2日前
株式会社豊田自動織機
遠心圧縮機
3日前
株式会社豊田自動織機
荷役システム
2日前
株式会社豊田自動織機
蓄電モジュール
2日前
株式会社豊田自動織機
車両制御システム
2日前
株式会社豊田自動織機
燃料電池システム
2日前
株式会社豊田自動織機
移動体の制振システムおよび移動体の制振方法
2日前
株式会社豊田自動織機
フィルム貼合樹脂板およびフィルム貼合樹脂板の製造方法
3日前
マグネデザイン株式会社
ロータ
17日前
トヨタ自動車株式会社
予測方法
11日前
株式会社豊田自動織機
モータ冷却装置
17日前
株式会社ダイヘン
充電装置
19日前
株式会社セイワ
車両用配線カバー
2日前
日産自動車株式会社
発電機
23日前
トヨタ自動車株式会社
電池制御装置
6日前
住友電装株式会社
電気接続箱
12日前
住友電装株式会社
電気接続箱
12日前
ダイハツ工業株式会社
曲げ加工装置
13日前
富士電機株式会社
リニアモータ
2日前
株式会社ダイヘン
電圧調整装置
19日前
株式会社デンソー
携帯機
17日前
トヨタ自動車株式会社
駆動ユニット
9日前
株式会社エフ・シー・シー
太陽光発電装置
2日前
トヨタ自動車株式会社
電磁鋼板の成形方法
18日前
株式会社力電
配線スペース低減型の切替盤
16日前
ナブテスコ株式会社
駆動装置
6日前
株式会社アイシン
電力変換装置
11日前
神崎産業株式会社
漏電検出装置
3日前
トヨタ自動車株式会社
ステータ
13日前
トヨタ自動車株式会社
車両の制御装置
2日前
トヨタ自動車株式会社
車両の制御装置
16日前
矢崎総業株式会社
電線保護構造
19日前
株式会社デンソー
電力変換装置
18日前
株式会社デンソー
電力変換装置
18日前
株式会社明電舎
ドローン
19日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ