TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025102124
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219376
出願日
2023-12-26
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20250701BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
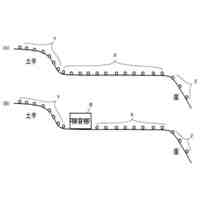
【課題】本発明は、常に作業車両と畔が適切な距離を保ちながら、作業を行える作業車両を提供することを課題とする。
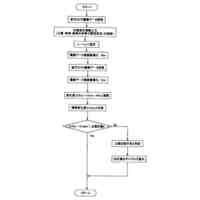
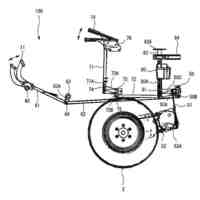
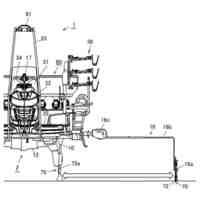
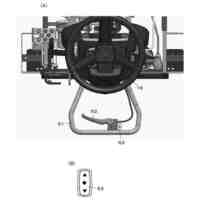
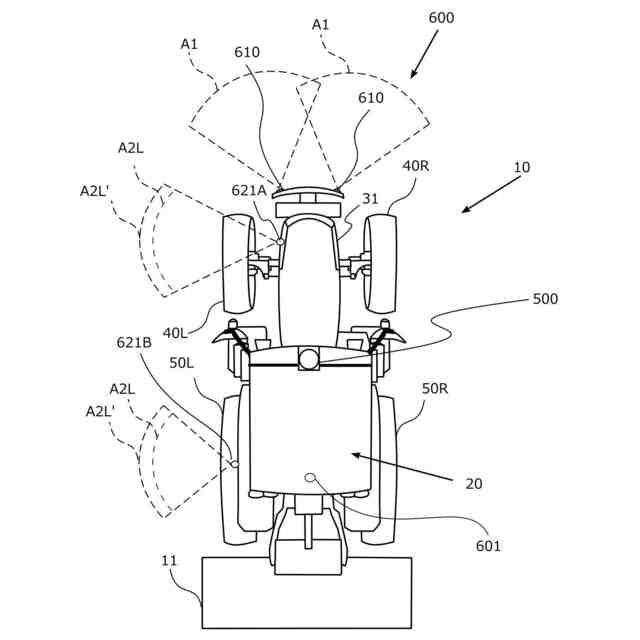
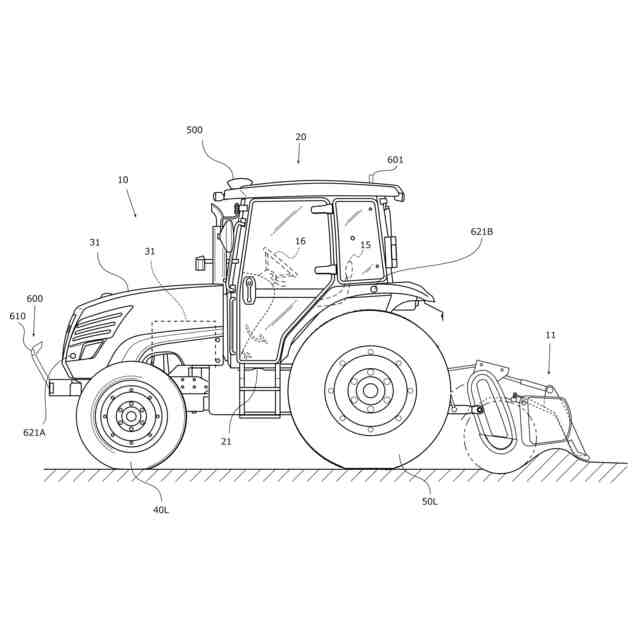
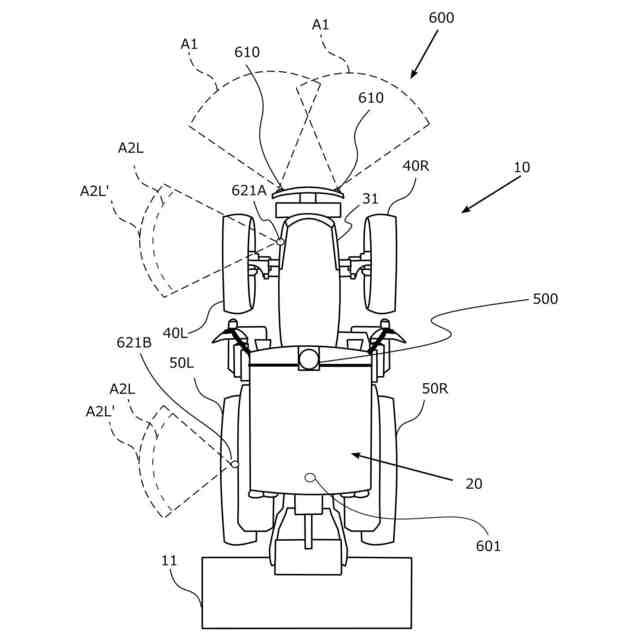
【解決策】行車体10と、前記走行車体10に取り付けられた操舵輪40L、40R、と前記走行車体10を自律走行させる制御部200と、前記走行車体前部10から畔までの距離を検出する第1畔検出センサ621Aを前記走行車体の前部側面に備え、前記走行車体後部から畔までの距離を検出する第2畔検出センサ621Bを前記走行車体10の後部側面に備え、制御部200は、前記第1畔検出センサ621Aおよび前記第2畔検出センサ621Bの検出結果に基づいて前記走行車体10が畔に沿って走行するように自動操縦する作業車両とする。
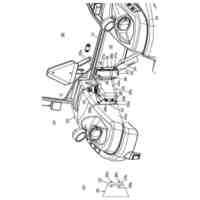
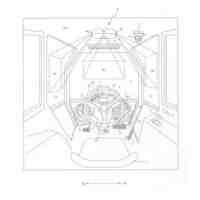
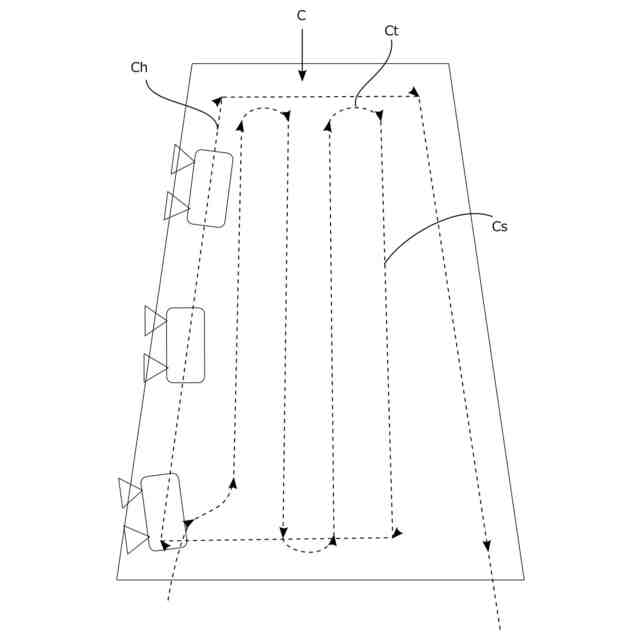
【選択図】図2
特許請求の範囲
【請求項1】
走行車体と、
前記走行車体に取り付けられた操舵輪と
前記走行車体を自律走行させる制御部と、
前記走行車体前部から畔までの距離を検出する第1畔検出センサを前記走行車体の前部側面に備え、
前記走行車体後部から畔までの距離を検出する第2畔検出センサを前記走行車体の後部側面に備え、
制御部は、前記第1畔検出センサおよび前記第2畔検出センサの検出結果に基づいて前記走行車体が畦に沿って走行するように自動操縦する
作業車両。
続きを表示(約 930 文字)
【請求項2】
前記制御部は
前記第1畔検出センサから畔までの距離が規定の範囲内であり
前記第2畔検出センサから畔までの距離も規定の範囲内であるときは
直進するよう自動操縦する
請求項1に記載の作業車両。
【請求項3】
前記制御部は
前記第1畔検出センサから畔までの距離が規定の範囲より離れたことを検知し、
かつ前記第2畔検出センサから畔までの距離が規定の範囲内である場合
操舵輪を畔方向に切り、前記第1畔検出センサから畔までの距離が規定の範囲内になるように自動操縦する
請求項1に記載の作業車両。
【請求項4】
前記制御部は
前記第1畔検出センサから畔までの距離が規定の範囲内であり
かつ前記第2畔検出センサから畔までの距離が規定の範囲より離れたことを検知した場合
操舵輪を畔と反対方向に切り、前記第2畔検出センサから畔までの距離が規定の範囲内になるように自動操縦する
請求項1に記載の作業車両。
【請求項5】
前記制御部は
前記第1畔検出センサから畔までの距離が規定の範囲よりも近づいたことを検知し、
かつ前記第2畔検出センサから畔までの距離が規定の範囲内である場合
操舵輪を畔と反対方向に切り、前記第1畔検出センサから畔までの距離が規定の範囲内になるように自動操縦する
請求項1に記載の作業車両。
【請求項6】
前記制御部は
前記第1畔検出センサから畔までの距離が規定の範囲内であり
前記第2畔検出センサから畔までの距離が規定の範囲よりも近づいたことを検知した場合
操舵輪を畔方向に切り、前記第2畔検出センサから畔までの距離が規定の範囲内になるように自動操縦する
請求項1に記載の作業車両。
【請求項7】
前記走行車体に装着した作業機の幅情報を取得し、
前記幅情報に基づいて前記第1畔検出センサおよび前記第2畔検出センサから畔までの距離の既定の範囲を設定する
請求項2から6に記載の作業車両
発明の詳細な説明
【技術分野】
【0001】
本発明は、トラクタ等の作業車両に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
走行車体の自己位置を測定する測位装置を有し、車両に装着した作業機を認識する作業機任式手段を有し、あらかじめ設定された予定走行経路に沿って自立走行させる制御部を有し、制御部は、予定走行経路内にある障害物を認識する障害物認識手段により進行方向に存在する障害物を認識すると装着された作業機に応じて走行経路を変更し、障害物を回避する作業車両が公知である。(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2019-97454
【発明の概要】
【発明が解決しようとする課題】
【0004】
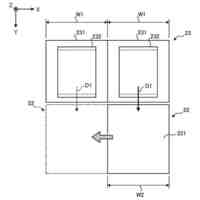
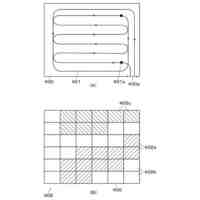
上記従来の作業車両では、測位装置で走行車体位置を測ることで、あらかじめ設定された予定走行経路の畔際を走行中に障害物を認識すると回避操作を行い予定走行経路に戻っていた。しかし、測位装置は実際の位置と多少のずれが生じるため、畔際との距離が開いてしまい残耕が残っていた。本発明では、常に畔と適切な距離を保ちながら作業を行える作業車両を提供することを目的とする。
【課題を解決するための手段】
【0005】
前述した課題を解決するために、次のように構成する。
【0006】
請求項1の発明は、走行車体(10)と、前記走行車体(10)に取り付けられた操舵輪(40L、40R)と前記走行車体(10)を自律走行させる制御部(200)と、前記走行車体前部(10)から畔までの距離を検出する第1畔検出センサ(621A)を前記走行車体の前部側面に備え、前記走行車体後部から畔までの距離を検出する第2畔検出センサ(621B)を前記走行車体(10)の後部側面に備え、前記第1畔検出センサ(621A)および前記第2畔検出センサ(621B)の検出結果に基づいて前記走行車体(10)が畦に沿って走行するように自動操縦することを特徴とする。
【0007】
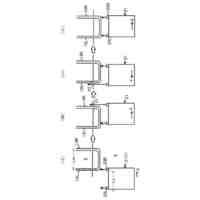
請求項2の発明は、前記制御部(200)は前記第1畔検出センサ(621A)から畔までの距離が規定の範囲内であり、前記第2畔検出センサ(621B)から畔までの距離も規定の範囲内であるときは直進するよう自動操縦することを特徴とする。
【0008】
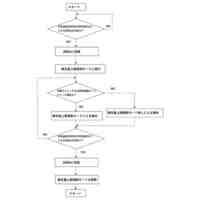
請求項3の発明は、前記制御部(200)は前記第1畔検出センサ(621A)から畔までの距離が規定の範囲内以上離れたことを検知し、かつ前記第2畔検出センサ(621B)から畔までの距離が規定の範囲内である場合操舵輪(40L、40R)を畔方向に回転させ、前記第1畔検出センサから畔までの距離が規定の範囲内になるように自動操縦することを特徴とする。
【0009】
請求項4の発明は、前記制御部(200)は前記第1畔検出センサ(621A)から畔までの距離が規定の範囲内であり、かつ前記第2畔検出センサ(621B)から畔までの距離が規定の範囲内より離れたことを検知した場合操舵輪(40L、40R)を畔と反対方向に回転させ、前記第2畔検出センサから畔までの距離が規定の範囲内になるように自動操縦することを特徴とする。
【0010】
請求項5の発明は、前記制御部(200)は前記第1畔検出センサから畔までの距離が規定の範囲内よりも近づいたことを検知し、かつ前記第2畔検出センサ(621B)畔までの距離が規定の範囲内である場合操舵輪(40L、40R)を畔と反対方向に回転させ、前記第1畔検出センサ(621A)から畔までの距離が規定の範囲内になるように自動操縦することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
移植機
1か月前
井関農機株式会社
田植機
26日前
井関農機株式会社
移植機
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
苗移植機
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
精米設備
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
農作業機
1か月前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
13日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
16日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
調製設備
2か月前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
16日前
井関農機株式会社
乗用草刈機
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ