TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025091042
公報種別
公開特許公報(A)
公開日
2025-06-18
出願番号
2023206005
出願日
2023-12-06
発明の名称
運転評価装置および運転評価方法
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
G08G
1/00 20060101AFI20250611BHJP(信号)
要約
【課題】ドライバの運転技量を適切に評価する運転評価装置を提供する。
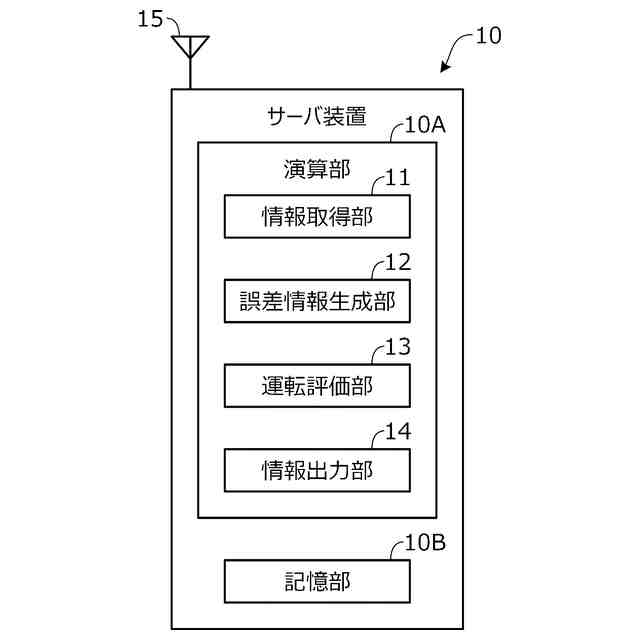
【解決手段】運転評価装置は、情報取得部11によって取得された複数の車両の走行情報に基づいて、評価対象道路における対象車両および他車両のそれぞれについての操舵の予測値に対する実測値の誤差の情報である操舵誤差情報を生成する誤差情報生成部12と、乾燥期間における他車両および対象車両の操舵誤差情報に基づいて、第1基準に従い乾燥期間における対象車両のドライバの運転技量を評価する一方、乾燥期間における他車両の操舵誤差情報と氷雪期間における対象車両の操舵誤差情報とに基づいて、第1基準よりも緩い第2基準に従い氷雪期間における対象車両のドライバの運転技量を評価する前記運転評価部13と、を備える。
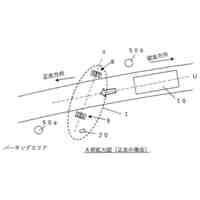
【選択図】図4
特許請求の範囲
【請求項1】
時刻情報が対応付けられた評価対象車両および比較対象車両の走行情報であって、前記評価対象車両および前記比較対象車両の位置情報とステアリングの操作情報である操舵情報とを含む走行情報と、道路地図情報と、を取得する情報取得部と、
前記情報取得部によって取得された前記走行情報に基づいて、前記道路地図情報によって特定される評価対象道路における、前記評価対象車両および前記比較対象車両のそれぞれについての操舵の予測値に対する実測値の誤差の情報である操舵誤差情報を生成する誤差情報生成部と、
前記誤差情報生成部により生成された第1期間における前記比較対象車両の操舵誤差情報と前記第1期間における前記評価対象車両の操舵誤差情報とに基づいて、第1基準に従い前記第1期間における前記評価対象車両のドライバの運転技量を評価する一方、前記誤差情報生成部により生成された前記第1期間における前記比較対象車両の操舵誤差情報と前記第1期間とは異なる第2期間における前記評価対象車両の操舵誤差情報とに基づいて、第2基準に従い前記第2期間における前記評価対象車両のドライバの運転技量を評価する運転評価部と、を備え、
前記第2期間における前記誤差の程度は、前記第1期間における前記誤差の程度よりも大きく、
前記第1期間における前記比較対象車両の操舵誤差情報により定まる操舵誤差を基準値と定義し、前記評価対象車両の操舵誤差情報により定まる操舵誤差を評価対象値と定義するとき、前記第2基準は前記第1基準よりも、前記基準値と前記評価対象値との差と比較してドライバの運転技量を低下するための閾値を大きくするように、または、前記基準値と前記評価対象値との差を小さく補正するように定められることを特徴とする運転評価装置。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の運転評価装置において、
前記第1期間における前記評価対象車両の操舵誤差情報により定まる操舵誤差を第1評価対象値と定義し、前記第2期間における前記評価対象車両の操舵誤差情報により定まる操舵誤差を第2評価対象値と定義するとき、
前記運転評価部は、前記第1評価対象値が前記基準値よりも大きく、かつ、前記第1評価対象値と前記基準値との差が第1閾値よりも大きいとき、および、前記第2評価対象値が前記基準値よりも大きく、かつ、前記第2評価対象値と前記基準値との差が、前記第1閾値よりも大きな第2閾値よりも大きいとき、前記評価対象車両のドライバの運転技量の程度を第1程度から第2程度へ低下させることを特徴とする運転評価装置。
【請求項3】
請求項1に記載の運転評価装置において、
前記第1期間における前記評価対象車両の操舵誤差情報により定まる操舵誤差を第1評価対象値と定義し、前記第2期間における前記評価対象車両の操舵誤差情報により定まる操舵誤差を第2評価対象値と定義するとき、
前記運転評価部は、前記第1評価対象値が前記基準値よりも大きく、かつ、前記第1評価対象値と前記基準値との差が前記閾値よりも大きいとき、および、前記第2評価対象値が前記基準値よりも大きく、かつ、前記第2評価対象値と前記基準値との差に所定の補正係数を乗じた補正値が前記閾値よりも大きいとき、前記評価対象車両のドライバの運転技量の程度を第1程度から第2程度へ低下させることを特徴とする運転評価装置。
【請求項4】
請求項1~3のいずれか1項に記載の運転評価装置において、
前記比較対象車両は、前記評価対象車両と同一の車両であり、
前記基準値は、前記第1期間における前記比較対象車両の操舵誤差情報により定まる操舵誤差の代表値であり、
前記評価対象値は、前記評価対象車両の操舵誤差情報により定まる操舵誤差の代表値であることを特徴とする運転評価装置。
【請求項5】
請求項1~3のいずれか1項に記載の運転評価装置において、
前記比較対象車両は、前記評価対象車両とは異なる複数の車両であり、
前記基準値は、前記第1期間における前記比較対象車両の操舵誤差情報により定まる操舵誤差の代表値であり、
前記評価対象値は、前記評価対象車両の操舵誤差情報により定まる操舵誤差の代表値であることを特徴とする運転評価装置。
【請求項6】
請求項1~3のいずれか1項に記載の運転評価装置において、
前記第2期間は、路面に氷雪が生じる期間であり、前記第1期間は、路面に氷雪が生じない期間であることを特徴とする運転評価装置。
【請求項7】
請求項1~3のいずれか1項に記載の運転評価装置において、
前記運転評価部により評価された前記運転技量の情報がドライバの車両保険の算定に用いられるように前記運転技量の情報を出力する情報出力部をさらに備えることを特徴とする運転評価装置。
【請求項8】
時刻情報が対応付けられた評価対象車両および比較対象車両の走行情報であって、前記評価対象車両および前記比較対象車両の位置情報とステアリングの操作情報である操舵情報とを含む走行情報と、道路地図情報と、を取得するステップと、
取得された前記走行情報に基づいて、前記道路地図情報によって特定される評価対象道路における、前記評価対象車両および前記比較対象車両のそれぞれについての操舵の予測値に対する実測値の誤差の情報である操舵誤差情報を生成するステップと、
第1期間における前記比較対象車両の操舵誤差情報と前記第1期間における前記評価対象車両の操舵誤差情報とに基づいて、第1基準に従い前記第1期間における前記評価対象車両のドライバの運転技量を評価する一方、前記第1期間における前記比較対象車両の操舵誤差情報と前記第1期間とは異なる第2期間における前記評価対象車両の操舵誤差情報とに基づいて、第2基準に従い前記第2期間における前記評価対象車両のドライバの運転技量を評価するステップと、をコンピュータにより実行することを含み、
前記第2期間における前記誤差の程度は、前記第1期間における前記誤差の程度よりも大きく、
前記第1期間における前記比較対象車両の操舵誤差情報により定まる操舵誤差を基準値と定義し、前記評価対象車両の操舵誤差情報により定まる操舵誤差を評価対象値と定義するとき、前記第2基準は前記第1基準よりも、前記基準値と前記評価対象値との差と比較してドライバの運転技量を低下するための閾値を大きくするように、または、前記基準値と前記評価対象値との差を小さく補正するように定められることを特徴とする運転評価方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ドライバの運転技量を評価する運転評価装置および運転評価方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
この種の装置として、従来、車両に搭載されたGセンサからの情報に基づいてドライバの優良度を判定し、優良度に応じてドライバの保険内容に関する保険情報を生成するようにした装置が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2008/038340号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1記載の装置の構成では、運転操作に悪影響を与えるような路面を走行する頻度が高いドライバの優良度が低くなりやすく、このような優良度を用いたのでは、ドライバの運転技量を適切に評価することが難しい。
【課題を解決するための手段】
【0005】
本発明の一態様である運転評価装置は、時刻情報が対応付けられた評価対象車両および比較対象車両の走行情報であって、評価対象車両および比較対象車両の位置情報とステアリングの操作情報である操舵情報とを含む走行情報と、道路地図情報と、を取得する情報取得部と、情報取得部によって取得された走行情報に基づいて、道路地図情報によって特定される評価対象道路における、評価対象車両および比較対象車両のそれぞれについての操舵の予測値に対する実測値の誤差の情報である操舵誤差情報を生成する誤差情報生成部と、誤差情報生成部により生成された第1期間における比較対象車両の操舵誤差情報と第1期間における評価対象車両の操舵誤差情報とに基づいて、第1基準に従い第1期間における評価対象車両のドライバの運転技量を評価する一方、誤差情報生成部により生成された第1期間における比較対象車両の操舵誤差情報と第1期間とは異なる第2期間における評価対象車両の操舵誤差情報とに基づいて、第2基準に従い第2期間における評価対象車両のドライバの運転技量を評価する前記運転評価部と、を備える。第2期間における誤差の程度は、第1期間における前記誤差の程度よりも大きい。第1期間における比較対象車両の操舵誤差情報により定まる操舵誤差を基準値と定義し、評価対象車両の操舵誤差情報により定まる操舵誤差を評価対象値と定義するとき、第2基準は第1基準よりも、基準値と評価対象値との差と比較してドライバの運転技量を低下するための閾値を大きくするように、または、基準値と評価対象値との差を小さく補正するように定められる。
【0006】
本発明の他の態様である運転評価方法は、時刻情報が対応付けられた評価対象車両および比較対象車両の走行情報であって、評価対象車両および比較対象車両の位置情報とステアリングの操作情報である操舵情報とを含む走行情報と、道路地図情報と、を取得するステップと、取得された走行情報に基づいて、道路地図情報によって特定される評価対象道路における、評価対象車両および比較対象車両のそれぞれについての操舵の予測値に対する実測値の誤差の情報である操舵誤差情報を生成するステップと、第1期間における比較対象車両の操舵誤差情報と第1期間における評価対象車両の操舵誤差情報とに基づいて、第1基準に従い第1期間における評価対象車両のドライバの運転技量を評価する一方、第1期間における比較対象車両の操舵誤差情報と第1期間とは異なる第2期間における評価対象車両の操舵誤差情報とに基づいて、第2基準に従い第2期間における評価対象車両のドライバの運転技量を評価するステップと、をコンピュータにより実行することを含む。第2期間における誤差の程度は、第1期間における誤差の程度よりも大きい。第1期間における比較対象車両の操舵誤差情報により定まる操舵誤差を基準値と定義し、評価対象車両の操舵誤差情報により定まる操舵誤差を評価対象値と定義するとき、第2基準は第1基準よりも、基準値と評価対象値との差と比較してドライバの運転技量を低下するための閾値を大きくするように、または、基準値と評価対象値との差を小さく補正するように定められる。
【発明の効果】
【0007】
本発明によれば、運転操作に悪影響を与えるような路面を走行する頻度が高いドライバに対しても運転技量を適切に評価することができる。
【図面の簡単な説明】
【0008】
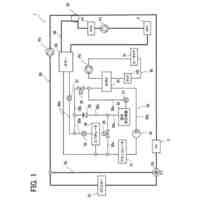
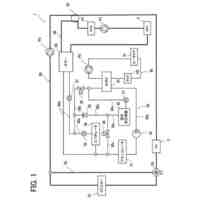
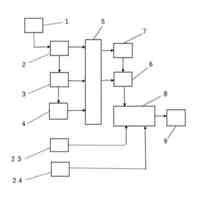
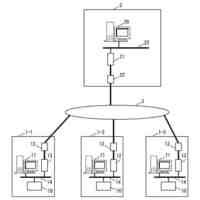
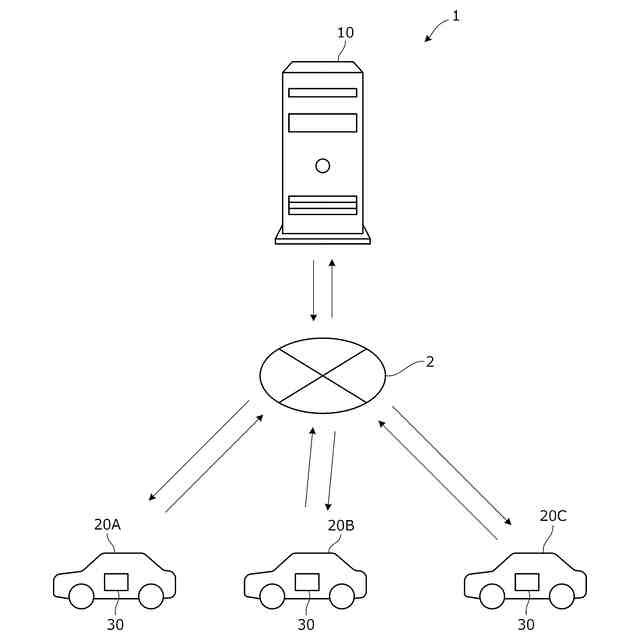
本発明の実施形態に係る運転評価装置を備える運転評価システムの全体構成を概略的に示す図。
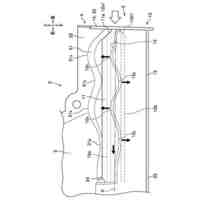
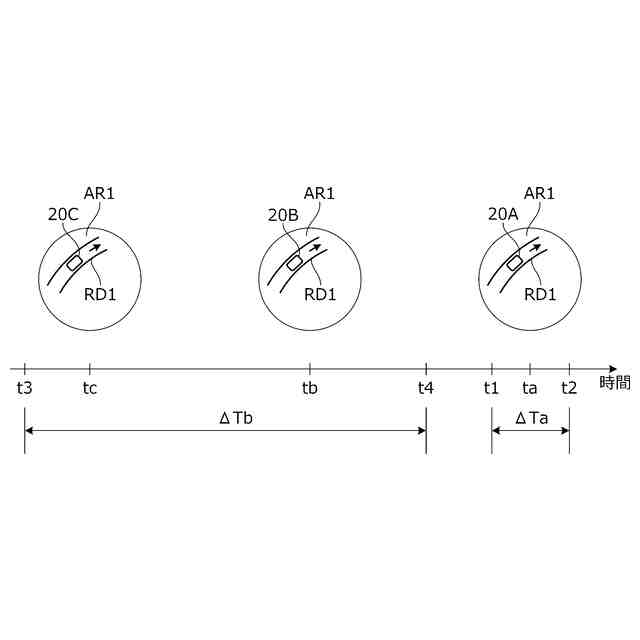
図1の対象車両と他車両との関係を示す図。
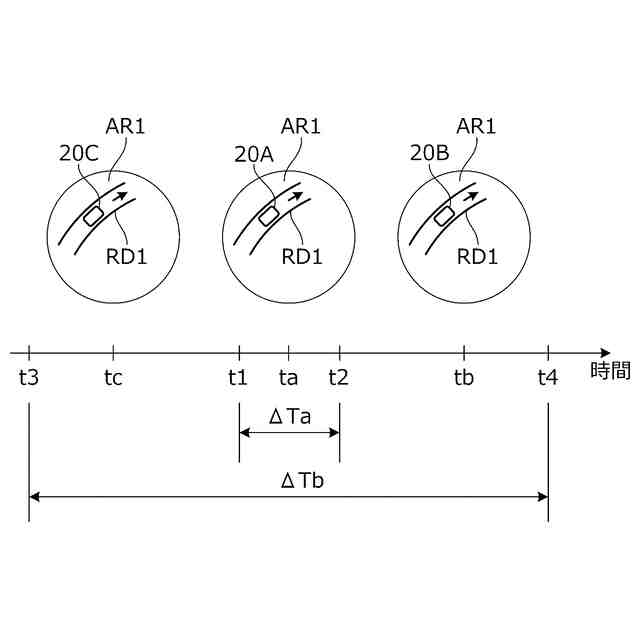
図1の対象車両と他車両との関係を示す別の図。
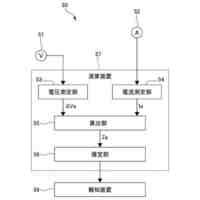
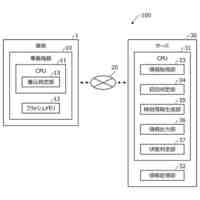
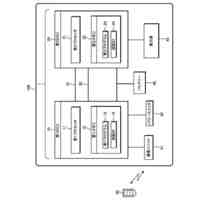
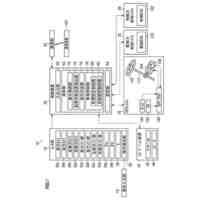
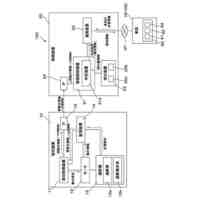
図1の車載装置の概略構成を示すブロック図。
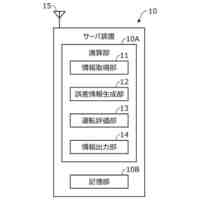
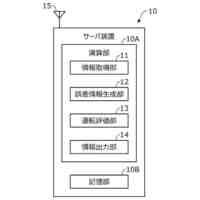
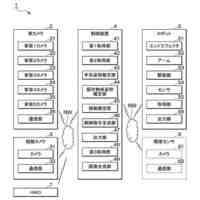
図1のサーバ装置の概略構成を示すブロック図。
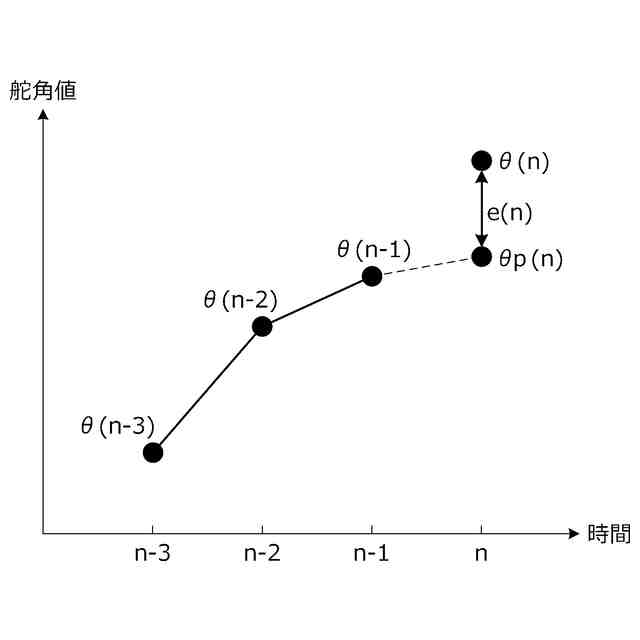
操舵角の予測誤差を説明するための図。
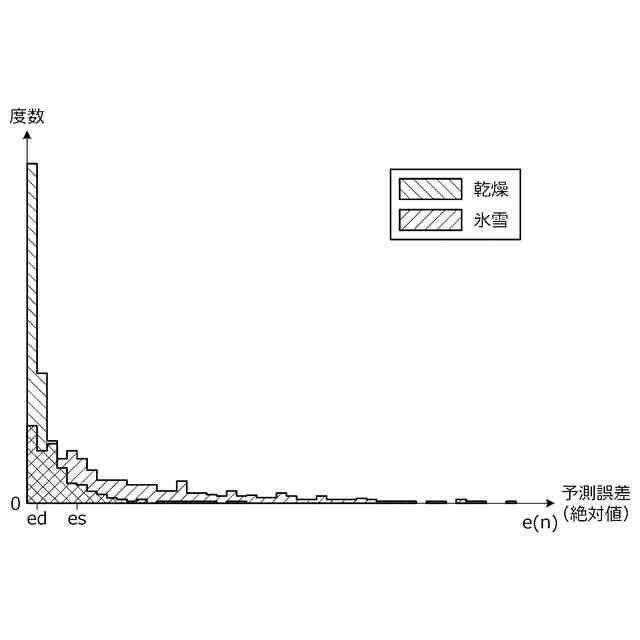
対象期間内に同一の評価対象道路を走行する複数の車両から得られた予測誤差の大きさの分布を示すヒストグラムの一例を示す図。
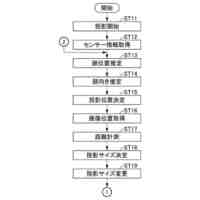
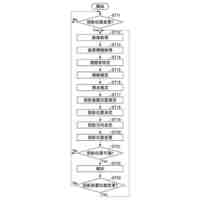
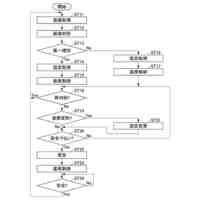
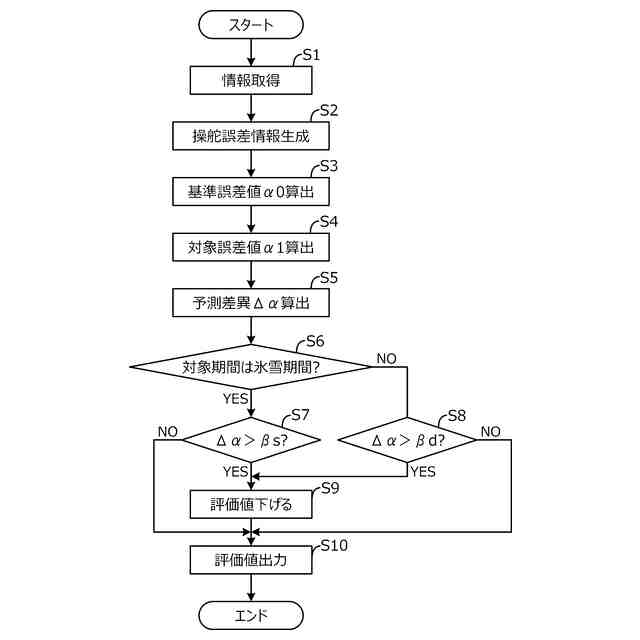
図4の演算部で実行される処理の一例を示すフローチャート。
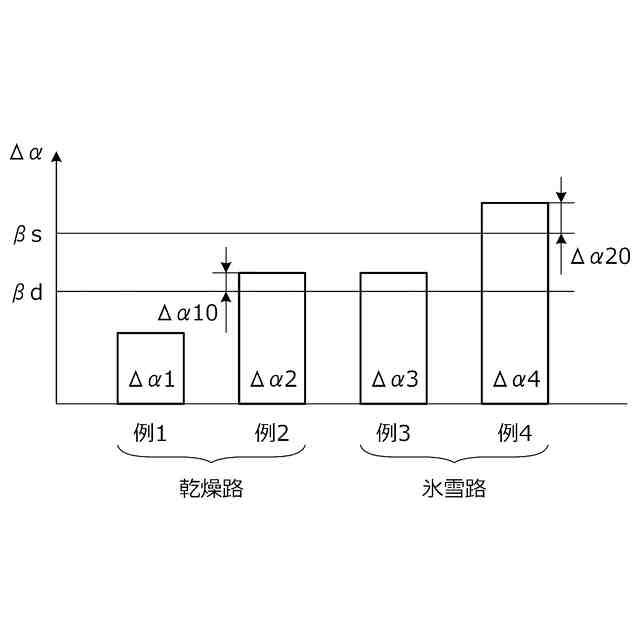
本実施形態に係る運転評価装置の動作の一例を示す図。
図2A,2Bの変形例を示す図。
図2A,2Bの別の変形例を示す図。
【発明を実施するための形態】
【0009】
以下、図1~図9Bを参照して本発明の実施形態について説明する。本発明の実施形態に係る運転評価装置は、ステアリングの操作情報である操舵情報に基づいて、対象車両(評価対象車両)のドライバ(対象ドライバと呼ぶ)の運転技量を評価するように構成される。運転技量の評価にあたっては、対象車両が氷雪路等の所定の路面状態の道路を走行する場合に、対象ドライバの操舵が不安定になりやすく、これにより対象ドライバの運転技量の評価に悪影響を与えるおそれがある。本実施形態では、この点に着目し、このような状況で、対象ドライバの運転技量を適切に評価し得るように運転評価装置を構成する。
【0010】
図1は、本発明の実施形態に係る運転評価装置を備える運転評価システム1の全体構成を概略的に示す図である。図1に示すように、運転評価システム1は、運転評価装置として機能するサーバ装置10と、複数の車両20に搭載された複数の車載装置30と、を備える。サーバ装置10と複数の車載装置30とは、ネットワーク2を介して互いに通信可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両
4日前
本田技研工業株式会社
車両
4日前
本田技研工業株式会社
クリップ
12日前
本田技研工業株式会社
鞍乗り型車両
5日前
本田技研工業株式会社
鞍乗り型車両
3日前
本田技研工業株式会社
コイル成形部材
12日前
本田技研工業株式会社
コイルユニット
12日前
本田技研工業株式会社
車両電源システム
5日前
本田技研工業株式会社
電池劣化推定装置
16日前
本田技研工業株式会社
鞍乗り型電動車両
4日前
本田技研工業株式会社
車両用フレーム構造
11日前
本田技研工業株式会社
車両用フレーム構造
11日前
本田技研工業株式会社
加熱安全性評価装置
4日前
本田技研工業株式会社
制御装置及びプログラム
5日前
本田技研工業株式会社
電極構造観察用セル組立体
3日前
本田技研工業株式会社
投影管理装置及びプログラム
11日前
本田技研工業株式会社
要因推定システムおよび車両
6日前
本田技研工業株式会社
導体成形装置及び導体成形方法
6日前
本田技研工業株式会社
制御装置、プログラム及び車両
11日前
本田技研工業株式会社
運転評価装置および運転評価方法
4日前
本田技研工業株式会社
運転評価装置および運転評価方法
4日前
本田技研工業株式会社
制御装置、プログラム及び制御方法
6日前
本田技研工業株式会社
前照灯制御装置及び前照灯制御方法
6日前
本田技研工業株式会社
車両情報収集装置および車両情報収集システム
5日前
本田技研工業株式会社
移動体制御装置、移動体制御方法、及びプログラム
6日前
本田技研工業株式会社
手指形状推定装置、手指形状推定方法、およびプログラム。
17日前
本田技研工業株式会社
燃料電池システム及び燃料電池システムの運転停止時制御方法
3日前
本田技研工業株式会社
制御装置、及び移動体
10日前
個人
安全運転車両
2か月前
個人
自動車ケアフル灯
2か月前
能美防災株式会社
発信機
2か月前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
1か月前
個人
逆走・正走車両検出システム
1か月前
アズビル株式会社
建物管理システム
19日前
日本信号株式会社
情報提供システム
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ