TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025118090
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024013193
出願日
2024-01-31
発明の名称
作業システム
出願人
井関農機株式会社
代理人
弁理士法人新大阪国際特許事務所
主分類
A01B
71/02 20060101AFI20250805BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】 本発明者は、ユーザーのさまざまなニーズを考慮し、便利な機能がトラクターのような作業車両へつぎつぎと実装される趨勢はますます加速すると考えている。しかしながら、従来の作業車両については、便利な機能を利用するときの使い勝手が必ずしもよくない。より具体的には、従来の作業車両については、作業車両と作業機との間の接続作業は必ずしも容易でない。
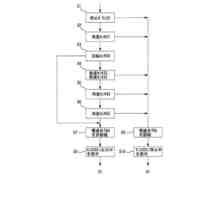
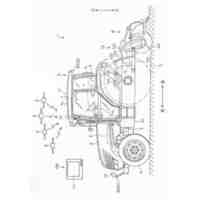
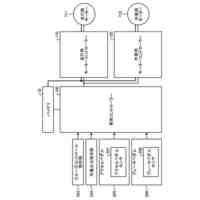
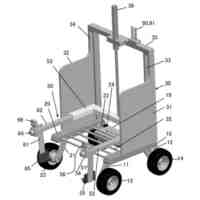
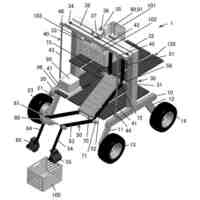
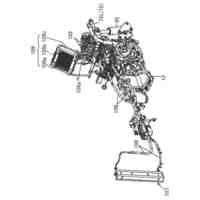
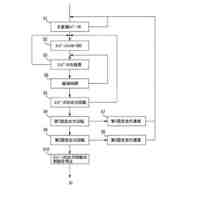
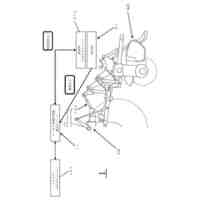
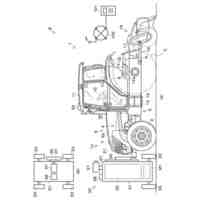
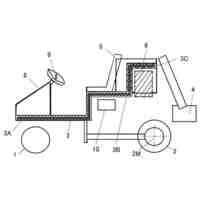
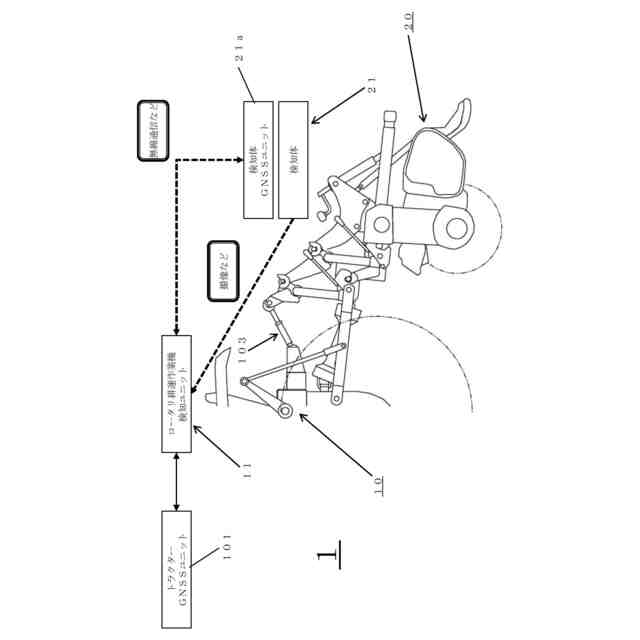
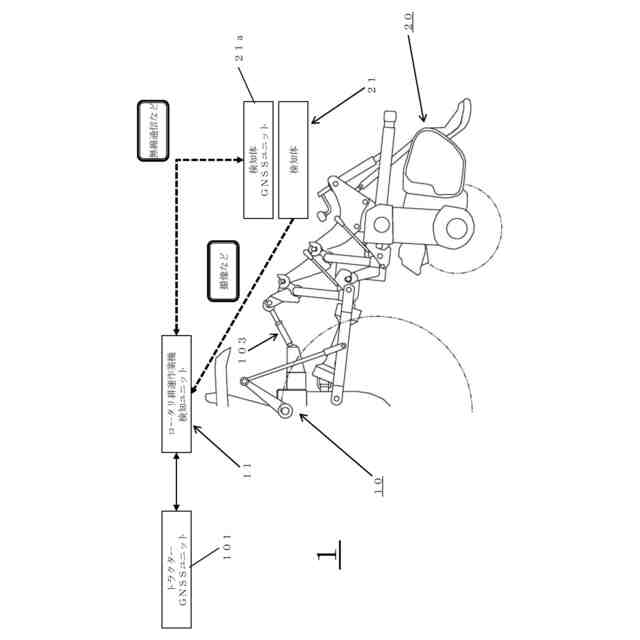
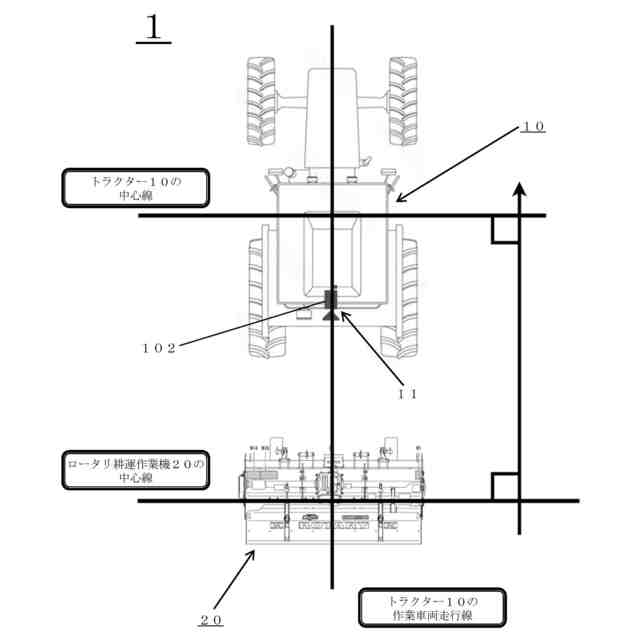
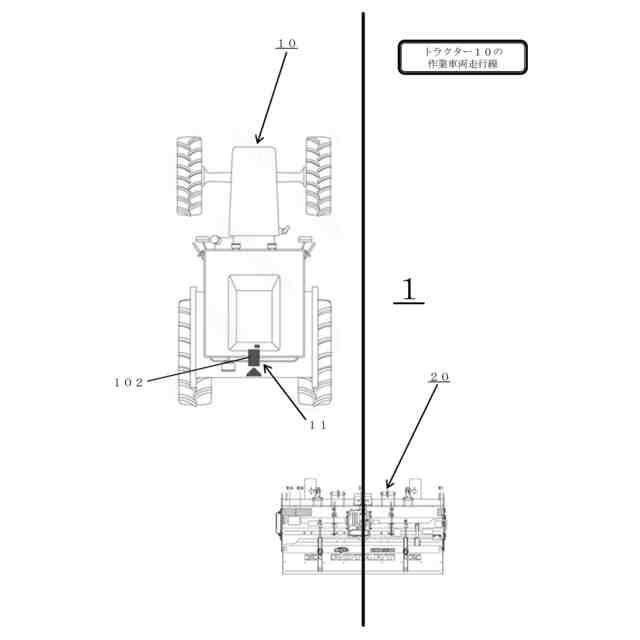
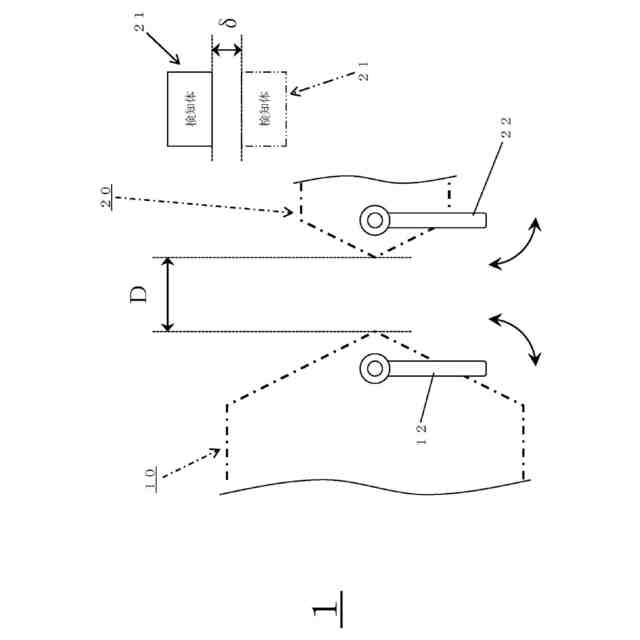
【解決手段】 トラクター10は、トラクター10を基準としたロータリ耕運作業機20の位置および向きを取得するロータリ耕運作業機検知ユニット11を有し、トラクター10とロータリ耕運作業機20との間の接続は、ロータリ耕運作業機検知ユニット11により取得された、ロータリ耕運作業機20の位置および向きに基づいて行われるロータリ耕運作業システムである。
【選択図】 図3
特許請求の範囲
【請求項1】
作業車両と、
前記作業車両へ接続される作業機と、
を備えており、
前記作業車両は、前記作業車両を基準とした前記作業機の位置および向きを取得する作業機検知ユニットを有し、
前記作業車両と前記作業機との間の接続は、前記作業機検知ユニットにより取得された、前記作業機の前記位置および前記向きに基づいて行われることを特徴とする作業システム。
続きを表示(約 1,200 文字)
【請求項2】
検知体が前記作業機へ取付けられており、
前記作業機に関する作業機情報が前記検知体へ書込まれており、
前記作業機検知ユニットは前記作業機情報も取得し、
前記作業車両と前記作業機との間の前記接続は、前記作業機情報にも基づいて行われることを特徴とする請求項1に記載の作業システム。
【請求項3】
前記作業機検知ユニットは、光学撮像、電波照射、レーザー照射および音波照射の内の少なくとも一つを利用することにより前記作業機の形状も取得し、
前記作業車両と前記作業機との間の前記接続は、前記作業機の前記形状にも基づいて行われることを特徴とする請求項1に記載の作業システム。
【請求項4】
前記検知体はあらかじめ定められた検知体取付け箇所で前記作業機へ取付けられており、
前記検知体の検知体GNSS位置情報を入手する検知体GNSSユニットが前記検知体へ設けられており、
前記作業機検知ユニットは、前記検知体GNSSユニットにより入手された前記検知体GNSS位置情報も取得し、
前記作業車両と前記作業機との間の前記接続は、前記検知体GNSS位置情報にも基づいて行われることを特徴とする請求項2に記載の作業システム。
【請求項5】
前記作業機検知ユニットは、前記検知体が取付けられている箇所の前記検知体取付け箇所からのズレも取得し、前記ズレに基づいて前記検知体GNSS位置情報を補正し、
前記作業車両と前記作業機との間の前記接続は、前記補正された検知体GNSS位置情報にも基づいて行われることを特徴とする請求項4に記載の作業システム。
【請求項6】
前記作業機情報は、前記検知体取付け箇所を基準とした前記作業機の寸法に関する情報であることを特徴とする請求項5に記載の作業システム。
【請求項7】
引込み状態と飛出し状態との間の切替えがマニュアル操作に応じて行われる、作業車両側コネクターが、前記作業車両へ設けられており、
引込み状態と飛出し状態との間の切替えがマニュアル操作に応じて行われる、作業機側コネクターが、前記作業機へ設けられており、
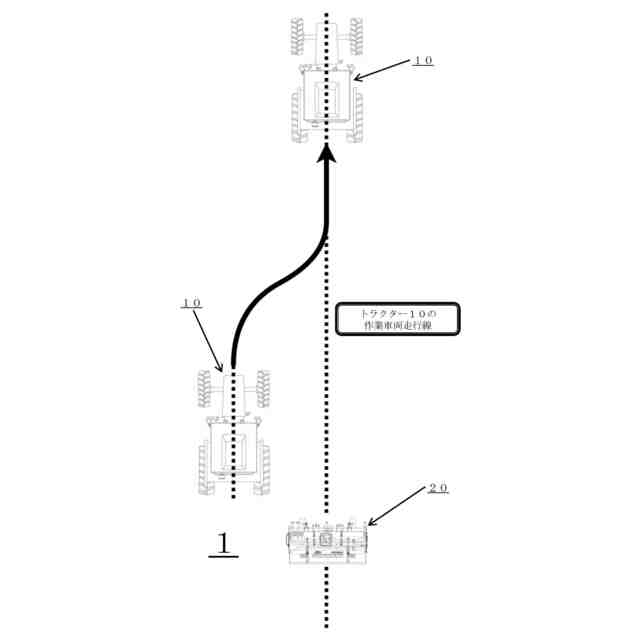
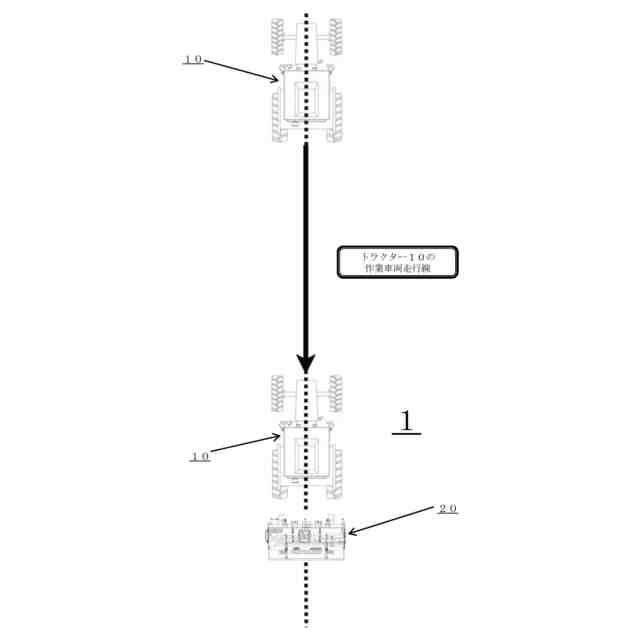
前記作業車両と前記作業機との間の前記接続は、前記作業車両が後進で前記作業機へ自動的に接近して停止した後、前記作業車両側コネクターと前記作業機側コネクターとの間の連結が前記マニュアル操作で行われる接続であり、
前記作業車両が前記作業機へ接近するとき、前記作業車両側コネクターおよび前記作業機側コネクターの状態は両方とも前記引込み状態であり、
前記作業車両が停止した後、前記作業車両側コネクターおよび前記作業機側コネクターの前記状態が両方とも前記引込み状態から前記飛出し状態へ前記マニュアル操作で切替えられることにより、前記作業車両側コネクターと前記作業機側コネクターとの間の前記連結が行われることを特徴とする請求項6に記載の作業システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロータリ耕運作業システムのような作業システムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
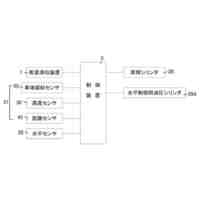
作業機をリフトアームで昇降可能にトラクターに装着し、作業機を昇降するリフトアームに設けるリフトアームセンサーと端部が接地しながら作業機の対地作業機構を覆う作業機カバーの昇降位置を検出するカバーセンサーを設け、カバーセンサーの検出する対地作業機構の耕深を設定耕深値となるようにカバーセンサーの検出耕深値に基づくカバー耕深制御を行い、このカバー耕深制御の間にリフトアームセンサーが検出する作業機位置検出値を制御基準値として記憶し、以後リフトアームセンサーが検出する作業機位置検出値が制御基準値となるようにリフトアーム耕深制御で昇降制御してなるトラクターのような作業車両の耕深自動制御装置が知られている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2012-200237号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、本発明者は、ユーザーのさまざまなニーズを考慮し、便利な機能がトラクターのような作業車両へつぎつぎと実装される趨勢はますます加速すると考えている。
【0005】
しかしながら、従来の作業車両については、便利な機能を利用するときの使い勝手が必ずしもよくないことに本発明者は気付いた。
【0006】
より具体的には、従来の作業車両については、作業車両と作業機との間の接続作業は必ずしも容易でないことに本発明者は気付いた。
【0007】
本発明は、上述された従来の課題を考慮し、使い勝手を向上することができる作業システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
第1の本発明は、作業車両と、
前記作業車両へ接続される作業機と、
を備えており、
前記作業車両は、前記作業車両を基準とした前記作業機の位置および向きを取得する作業機検知ユニットを有し、
前記作業車両と前記作業機との間の接続は、前記作業機検知ユニットにより取得された、前記作業機の前記位置および前記向きに基づいて行われることを特徴とする作業システムである。
【0009】
第2の本発明は、検知体が前記作業機へ取付けられており、
前記作業機に関する作業機情報が前記検知体へ書込まれており、
前記作業機検知ユニットは前記作業機情報も取得し、
前記作業車両と前記作業機との間の前記接続は、前記作業機情報にも基づいて行われることを特徴とする第1の本発明の作業システムである。
【0010】
第3の本発明は、前記作業機検知ユニットは、光学撮像、電波照射、レーザー照射および音波照射の内の少なくとも一つを利用することにより前記作業機の形状も取得し、
前記作業車両と前記作業機との間の前記接続は、前記作業機の前記形状にも基づいて行われることを特徴とする第1の本発明の作業システムである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
今日
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
26日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
田植え機
6日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
農作業車
2日前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
5日前
井関農機株式会社
作業車両
12日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
6日前
井関農機株式会社
農作業車
6日前
井関農機株式会社
圃場作業機
23日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
12日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
収穫作業車両
1か月前
井関農機株式会社
作業システム
1か月前
井関農機株式会社
充電システム
23日前
井関農機株式会社
根菜類収穫機
6日前
井関農機株式会社
汎用コンバイン
26日前
井関農機株式会社
電動乗用田植機
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ