TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025092017
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023207634
出願日
2023-12-08
発明の名称
移動体の自動運転支援装置、自動運転支援システム、監視装置、及び自動運転支援方法
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G05D
1/622 20240101AFI20250612BHJP(制御;調整)
要約
【課題】 作業員の負荷を軽減して、搬送された貨物を保管する施設において貨物を移動させる移動体の運転を支援する移動体の自動運転支援装置を提供する。
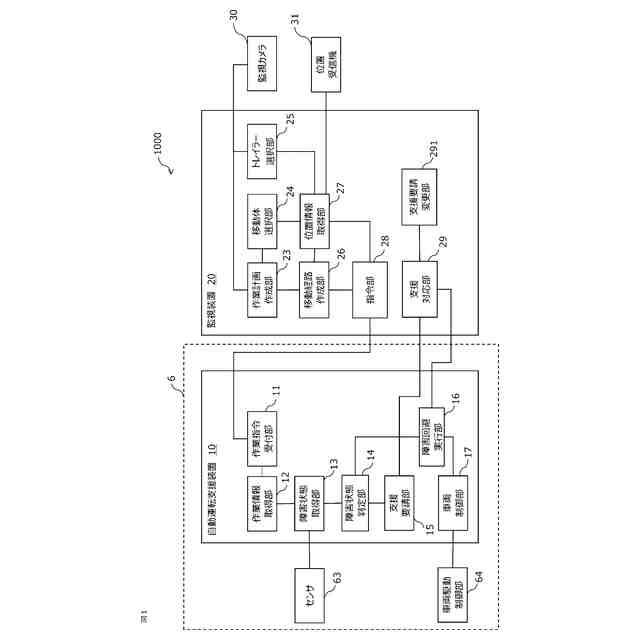
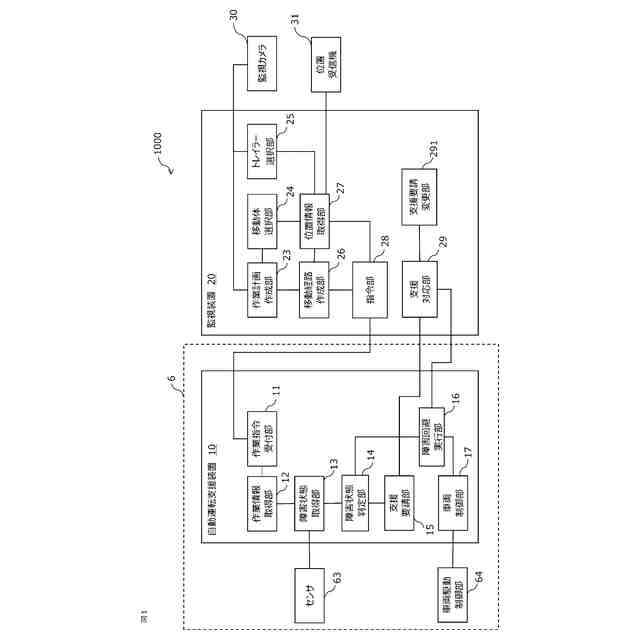
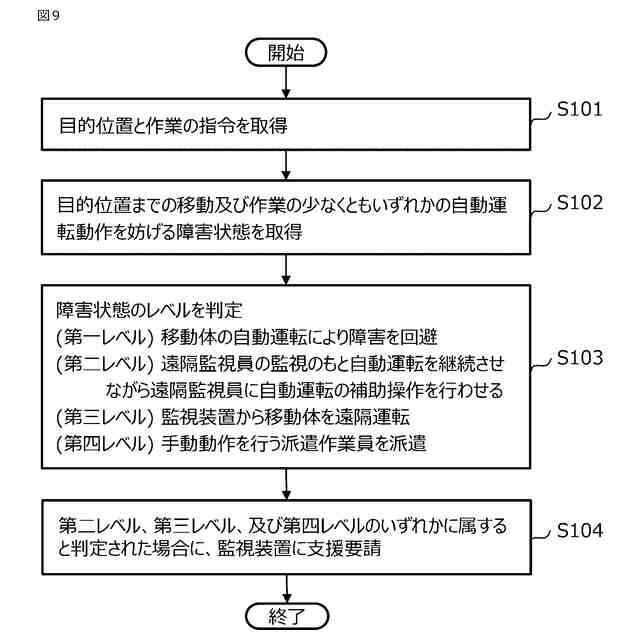
【解決手段】 目的位置と作業の指令を取得する作業情報取得部と、目的位置までの移動及び作業の少なくともいずれかの自動運転動作を妨げる障害状態を取得する障害状態取得部と、障害状態取得部で取得された障害状態が、移動体の自動運転により障害を回避させる第一レベル、遠隔監視員の監視のもと自動運転を継続させながら遠隔監視員に自動運転の補助操作を行わせる第二レベル、遠隔運転により移動体の運転を行う第三レベル、及び手動動作を行う派遣作業員の派遣を要請する第四レベルのいずれに属するか障害状態のレベルを判定する障害状態判定部と、障害状態判定部で第二レベル、第三レベル、及び第四レベルのいずれかに属すると判定された場合に、支援要請を行う支援要請部とを備える。
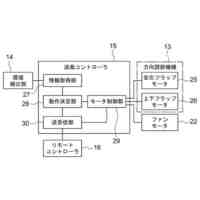
【選択図】図1
特許請求の範囲
【請求項1】
搬送された貨物を保管する施設において前記貨物を移動させる移動体の運転を支援する移動体の自動運転支援装置であって、
目的位置と作業の指令を取得する作業情報取得部と、
前記目的位置までの移動及び前記作業の少なくともいずれかの自動運転動作を妨げる障害状態を取得する障害状態取得部と、
前記障害状態取得部で取得された前記障害状態が、前記移動体の自動運転により障害を回避させる第一レベル、遠隔監視員の監視のもと自動運転を継続させながら前記遠隔監視員に自動運転の補助操作を行わせる第二レベル、遠隔運転により前記移動体の運転を行う第三レベル、及び手動動作を行う派遣作業員の派遣を要請する第四レベルのいずれに属するか前記障害状態のレベルを判定する障害状態判定部と、
前記障害状態判定部で前記第二レベル、前記第三レベル、及び前記第四レベルのいずれかに属すると判定された場合に、支援要請を行う支援要請部と
を備える移動体の自動運転支援装置。
続きを表示(約 1,500 文字)
【請求項2】
前記障害状態判定部は、前記障害状態取得部で取得した画像データを分析する画像分析部及び数値データを分析する数値分析部の少なくともいずれかを有し、前記画像データ及び前記数値データの少なくともいずれかを参照データと比較して、前記第一レベル、前記第二レベル、前記第三レベル、及び第四レベルのいずれに属するかを判定する請求項1に記載の移動体の自動運転支援装置。
【請求項3】
前記障害状態判定部は、前記障害状態に関して設定された複数の閾値を用いて、前記第一レベル、前記第二レベル、前記第三レベル、及び前記第四レベルのいずれに属するかを判定する請求項1に記載の移動体の自動運転支援装置。
【請求項4】
前記障害状態取得部は、前記障害状態として、移動経路上の障害物、前記貨物を積載する貨物積載車の駐車角度、前記貨物積載車と隣接する隣接貨物積載車との間隔、前記移動体を前記貨物積載車にヒッチングさせた動作の回数、前記貨物積載車を前記施設の搬入口にドッキングさせた動作の回数、及び天候の少なくともいずれかを用いる請求項1に記載の移動体の自動運転支援装置。
【請求項5】
前記障害状態判定部は、前記第一レベル、前記第二レベル、前記第三レベル、前記第四レベルの順に障害の程度が高くなるように判定する請求項1に記載の移動体の自動運転支援装置。
【請求項6】
前記障害状態判定部により前記第一レベルに属すると判定された場合、障害を回避する行動計画を生成し、前記行動計画に基づく前記自動運転動作を前記移動体に実行させる障害回避実行部を備える請求項1に記載の移動体の自動運転支援装置。
【請求項7】
前記作業情報取得部で取得した前記移動又は前記作業に関わる自動運転動作が終了した場合に、前記自動運転動作が正常に完了したか否かを判定する自動運転正常完了判定部を備え、前記自動運転正常完了判定部により正常に完了していないと判定された場合、前記移動体の運転を支援する自動運転支援処理を再実行する請求項1に記載の移動体の自動運転支援装置。
【請求項8】
前記作業情報取得部で取得した前記移動又は前記作業に関する自動運転動作が複数あって、現在の前記自動運転動作が正常に完了した場合に次の前記自動運転動作に移行する条件を判定する遷移条件判定部を備え、前記遷移条件判定部により次の前記自動運転動作に移行できないと判定された場合に、次の前記自動運転動作に係わる前記移動体の運転を支援する自動運転支援処理を実行する請求項1に記載の移動体の自動運転支援装置。
【請求項9】
請求項1から請求項8のいずれか一項に記載の前記移動体に搭載された移動体の自動運転支援装置と、
前記貨物を積載する貨物積載車及び前記移動体の位置情報を取得する位置情報取得部、複数の前記貨物積載車から対象となる対象貨物積載車を選択し、前記移動体を前記対象貨物積載車の駐車位置に移動させて前記貨物を運搬させる指令を行う指令部、及び前記自動運転支援装置から、遠隔操作の支援要請があった場合に前記移動体を遠隔操作し、遠隔運転の支援要請があった場合に前記移動体を遠隔運転し、手動動作を行う支援要請があった場合に派遣作業員に派遣を要請することにより前記支援要請に対応する支援対応部を有する監視装置と、
を備える移動体の自動運転支援システム。
【請求項10】
前記監視装置は、前記移動体からの前記支援要請を変更する支援要請変更部を備える請求項9に記載の自動運転支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、牽引車両、フォークリフト車等の移動体の自動運転支援装置、自動運転支援システム、監視装置、及び自動運転支援方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
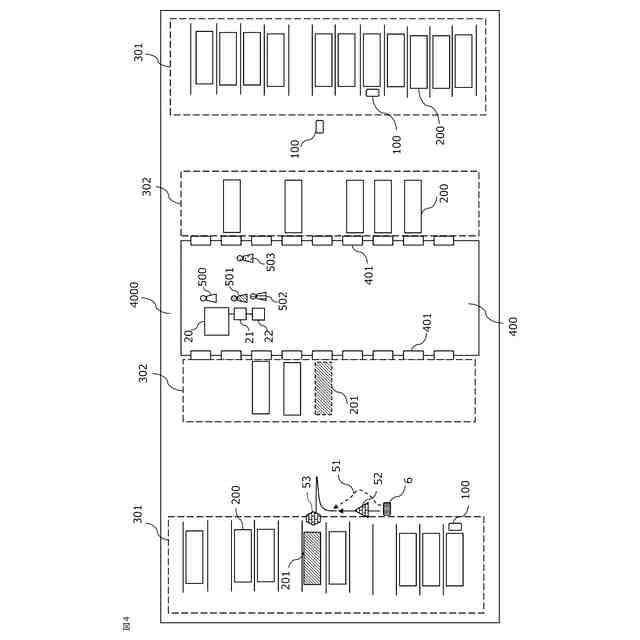
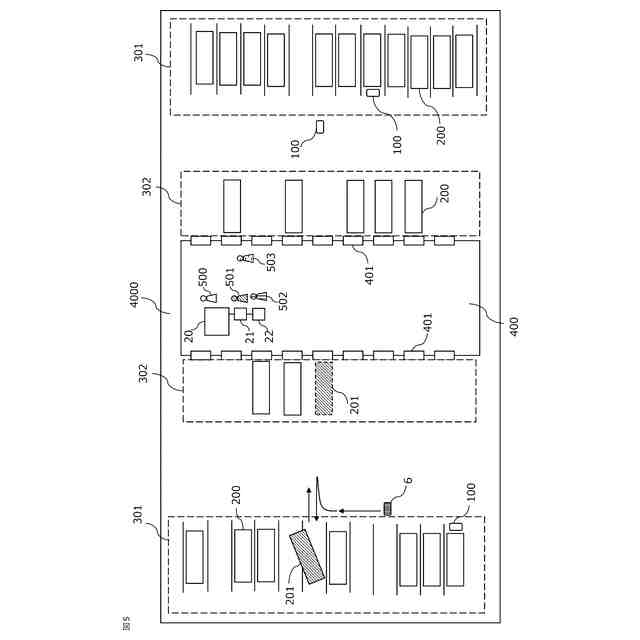
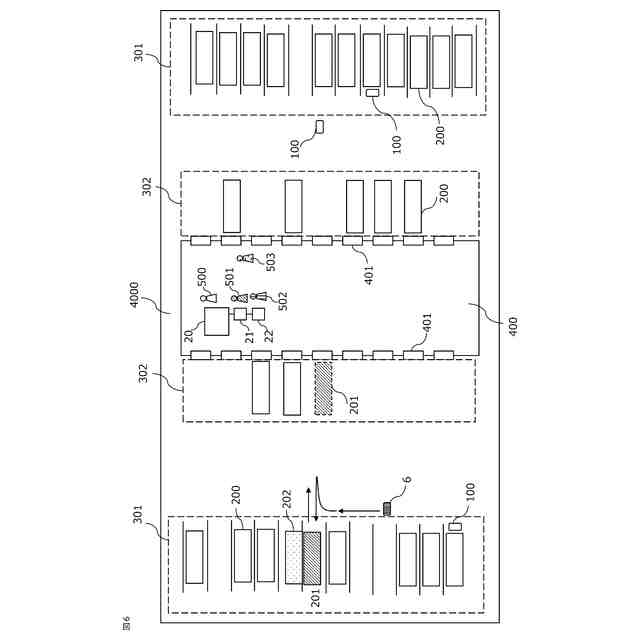
トレイラーに荷詰めされた貨物をトラクター等の牽引車両により搬送、運搬する作業、トラックで搬送された貨物をフォークリフトで運搬する作業等は、近年物流において重要な役割を担っている。例えばトレイラーで搬送された物資は、多数のトレイラーが駐車できる駐車場を備えた物流センター等の施設に保管される。物流センターでは、トラクターにトレイラーを連結(ヒッチング)させてトラクターがトレイラーを牽引して建物の搬入口まで運ぶ。トレイラーは搬入口に接合(ドッキング)され、物資が建物内に搬入される。これらの特有な作業はその一部が自動化されて物資の搬入作業等の効率化を図っている。
【0003】
特許文献1には、ピックアップスポットに位置するトレイラーの位置に自律型トラクターを移動させ、トレイラーとの結合を行う制御について開示されている。そして障害物を検出した場合には、オペレータ又は遠隔装置から支援を受けることが記載されている。また特許文献2には、一般の自動運転車両が自動運転を継続することが困難になった場合に、自動運転車両の遠隔操作又は遠隔運転を依頼することが記載されている。
【先行技術文献】
【特許文献】
【0004】
米国特許出願公開第2022/0410898号明細書
特開2021-195195号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、貨物積載車であるトレイラーが大幅に駐車線からずれて駐車され予め設定された移動経路ではトラクターとトレイラーをヒッチングすることが難しい、隣接する駐車枠に駐車する他のトレイラーとの間隔が狭いとヒッチング後のアンパーキングが難しい等、自動運転動作を妨げる要因が多数ある。これらを回避する動作を含めて自動化しようとすると設定が複雑化するため、結局現場に対応要員を派遣して解決せざるをえず、対応要員の負荷が大きいという課題があった。
【0006】
本開示は、上述の課題を解決するためになされたものであり、貨物積載車に積載された貨物を搬送、運搬する作業に柔軟に対応でき、対応要員の負荷を軽減できる移動体の自動運転支援装置を提供することを目的とする。また自動運転支援システム、監視装置、及び自動運転支援方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
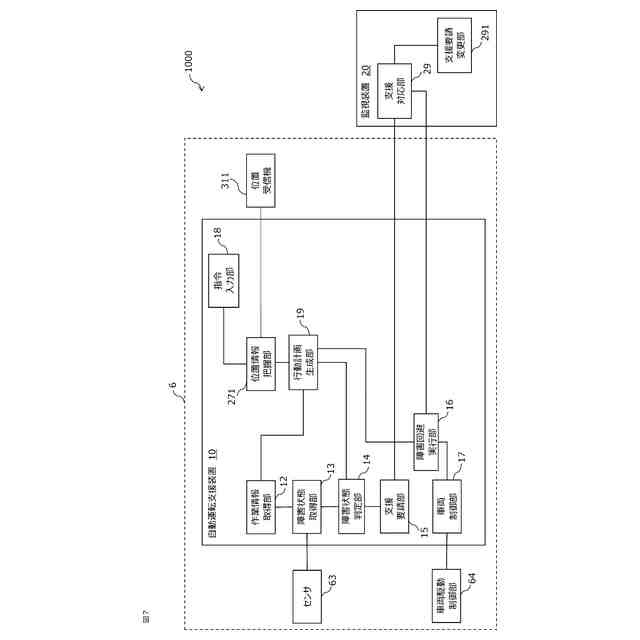
本開示に係る移動体の自動運転支援装置は、搬送された貨物を保管する施設において貨物を移動させる移動体の運転を支援する移動体の自動運転支援装置であって、目的位置と作業の指令を取得する作業情報取得部と、目的位置までの移動及び作業の少なくともいずれかの自動運転動作を妨げる障害状態を取得する障害状態取得部と、障害状態取得部で取得された障害状態が、移動体の自動運転により障害を回避させる第一レベル、遠隔監視員の監視のもと自動運転を継続させながら遠隔監視員に自動運転の補助操作を行わせる第二レベル、遠隔運転により移動体の運転を行う第三レベル、及び手動動作を行う派遣作業員の派遣を要請する第四レベルのいずれに属するか障害状態のレベルを判定する障害状態判定部と、障害状態判定部で第二レベル、第三レベル、及び第四レベルのいずれかに属すると判定された場合に、支援要請を行う支援要請部とを備える。
【0008】
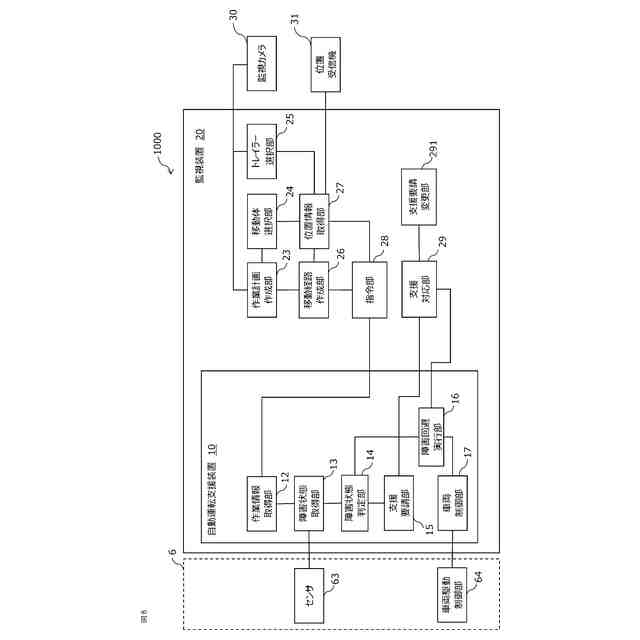
また本開示に係る移動体の自動運転支援システムは、移動体に搭載された本開示に係わる移動体の自動運転支援装置と、貨物を積載する貨物積載車及び移動体の位置情報を取得する位置情報取得部、複数の貨物積載車から対象となる対象貨物積載車を選択し、移動体を対象貨物積載車の駐車位置に移動させて貨物を運搬させる指令を行う指令部、及び自動運転支援装置から、遠隔操作の支援要請があった場合に移動体を遠隔操作し、遠隔運転の支援要請があった場合に移動体を遠隔運転し、手動動作を行う派遣作業員の派遣要請があった場合に派遣作業員に派遣要請を行うことにより支援要請に対する対応を行う支援対応部を有する監視装置とを備える。
【0009】
また本開示に係る移動体の他の自動運転支援システムは、目的位置と作業の指令を入力する指令入力部、目的位置を把握する位置情報把握部、指令入力部で入力された作業情報と位置情報把握部で把握した目的位置までの位置情報に基づいて行動計画を生成する行動計画生成部を有し、生成した行動計画に基づいて、移動体に自動運転動作を実行させる本開示に係わる移動体に搭載された移動体の自動運転支援装置と、自動運転支援装置から、遠隔操作の支援要請があった場合に移動体を遠隔操作し、遠隔運転の支援要請があった場合に移動体を遠隔運転し、手動動作を行う支援要請があった場合に派遣作業員に派遣を要請することにより支援要請に対応する支援対応部を有する監視装置とを備える。
【0010】
また本開示に係る移動体の監視装置は、本開示に係わる移動体の自動運転支援装置と、貨物を積載する貨物積載車及び移動体の位置情報を取得する位置情報取得部と、複数の貨物積載車から対象となる対象貨物積載車を選択し、移動体を対象貨物積載車の駐車位置に移動させて貨物を運搬させる指令を行う指令部と、指令における自動運転動作を妨げる障害状態について、遠隔操作の支援要請があった場合に移動体を遠隔操作し、遠隔運転の支援要請があった場合に移動体を遠隔運転し、手動動作を行う派遣作業員の派遣要請があった場合に派遣作業員に派遣要請を行うことにより支援要請に対する対応を行う支援対応部とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
吸音体
1か月前
三菱電機株式会社
冷蔵庫
21日前
三菱電機株式会社
冷蔵庫
7日前
三菱電機株式会社
電子機器
22日前
三菱電機株式会社
照明器具
7日前
三菱電機株式会社
照明装置
26日前
三菱電機株式会社
送風装置
7日前
三菱電機株式会社
照明装置
22日前
三菱電機株式会社
送風装置
1か月前
三菱電機株式会社
照明器具
1日前
三菱電機株式会社
梱包装置
18日前
三菱電機株式会社
束線器具
1日前
三菱電機株式会社
遠心送風機
1か月前
三菱電機株式会社
飛しょう体
1か月前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
漏電遮断器
5日前
三菱電機株式会社
半導体装置
1日前
三菱電機株式会社
半導体装置
25日前
三菱電機株式会社
半導体装置
14日前
三菱電機株式会社
給湯システム
19日前
三菱電機株式会社
電力変換装置
19日前
三菱電機株式会社
制御システム
21日前
三菱電機株式会社
空調システム
6日前
三菱電機株式会社
電力変換装置
25日前
三菱電機株式会社
貯湯式給湯機
25日前
三菱電機株式会社
電力変換装置
5日前
三菱電機株式会社
電力変換装置
13日前
三菱電機株式会社
照明システム
26日前
三菱電機株式会社
電力変換装置
29日前
三菱電機株式会社
電力変換装置
1日前
三菱電機株式会社
電磁ピンセット
21日前
三菱電機株式会社
ゲート駆動装置
5日前
三菱電機株式会社
誘導加熱調理器
1か月前
三菱電機株式会社
非可逆回路素子
1か月前
三菱電機株式会社
回転電機制御装置
28日前
三菱電機株式会社
無線通信システム
14日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ